II.1 Localisation des structures
urbaines :
II.1.1 Segmentation :
II.1.1.1 Approche 1 : Contour
non-déformable
II.1.1.1.1. Les operateurs dérivateur'' gradient
et Laplacien'' :
a. Les opérateurs dérivateurs du premier
ordre : Sobel, Prewitt :
Les étapes de détection des contours par la
méthode de gradient sont résumés dans l'organigramme
suivant :
Algorithme :
Début
Chargement de l'image IM[i][j]
Lire SobelH
Lire SobelV
Pour i=0 jusqu'à hauteur
Pour j=0 jusqu'à largeur
s1=0 ; s2=0 ; s=0 ;
Pour l=0 jusqu'à 3
Pour m=0 jusqu'à 3
s1=s1+ IM [i-m-1][j-l-1]*SobelH[x][y];
s2=s2+ IM [i-m-1][j-l-1]*SobelV[x][y];
s=;
data[i][j]=s ;
Fin
Fin
if (seuil< data [i][j])
data [i][j]=255;
sinon
data [i][j]=0;
fin
fin
Fin
Détection par le gradient :
En entrer : valeur de Seuil.
1. Première étape : calculer
le gradient suivant l'axe vertical de l'image.
(IV.1)
2. Deuxième étape : calculer
le gradient de l'image suivant l'axe horizontal.
(IV.2)
3. Troisième étape : calculer
la norme de gradient de l'image.
(IV.3)
4. Quatrième étape : Suppression des
non-maxima
Si la norme du gradient en un pixel (x,y) est inferieure a la
norme du gradient d'un de ses 2 voisins le long de la direction du gradient,
alors mettre la norme pour le pixel (x,y) a zero
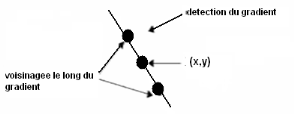
Figure-IV.3 : Etape de suppression des
non-maxima
5 - Seuillage des contours
(hystérésis)
Utilise deux seuils : un seuil haut (Sh) et un seuil bas
(Sb)
Pour chaque pixel de la norme du gradient :
ï Si norme(x,y) < Sb, alors le pixel est mis a
zéro (non-contour)
ï Si norme(x,y) > Sh, alors le pixel est un
contour
ï Si Sb = norme(x,y) = Sh, alors le pixel est un contour
s'il est connecté a un autre pixel déjà
acceptéé comme contour
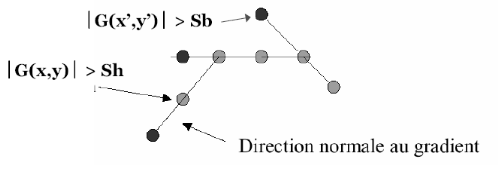
Figure-IV.4 : Etape de seuillage
Résultats obtenu :
|
|
|
|
Image originale
|
Détection de contours par l'operateur
SOBEL(seuil=136)
|
Détection de contours par l'operateur
PREWITT(seuil=136)
|
Ces filtres sont moins sensibles au bruit que ceux de Robert
car le fait d'introduire un moyenneur local sur le domaine couvert par le
masque diminue leur sensibilité au bruit, concernant la qualité
du contour, les deux opérateurs fournissent un contour moyen.
b. Les opérateurs dérivateurs de
deuxième ordre `' Laplacien'' :
La détection de contours par Laplacien consiste à
convoluer l'image par le filtre suivant :
Résultats :
|
|
|
Image originale
|
Laplacien (seuil = 26)
|
Figure-IV.4 : Détection de
contours par le Laplacien
Remarque : on remarque que
L'opérateur de Prewitt se révèle très peu
différent de celui de Sobel. On peut toutefois noter qu'il est
légèrement plus sensible au bruit, et que : La détection
de contours par Laplacien est très sensible aux bruits.
Comparaison des méthodes de détection de
contours :
|
Opérateurs
|
Sensibilité
au bruit
|
Epaisseur des contours
|
Localisation
|
Matrices
|
|
Opérateur de
Prewitt
|
peu sensible
|
épais
|
centré
|
3x3
|
|
Opérateur de
Sobel
|
Assez sensible
|
moyen
|
centré
|
3x3
|
|
Opérateur de Laplacien
|
Sensible
|
très fins
|
centré
|
3x3
|
Tab.IV. 1. Tableau comparatif des méthodes de
détection de contours.
II.1.1.1.2. Le filtre de Canny:
a. Critères de l'approche de
Canny :
- Détection : Bonne détection
des points de contours (notamment pour les contours faibles).
- Localisation : Localisation faible des
points de contours.
- Unicité de la détection :
Pour un contour, on a un seul point de contour.
b. Algorithme de Canny :
Premier étape : appliquer un filtre
gaussien c'est-à-dire filtré d'abord l'image avec un filtre
gaussien G.
(IV.4)
I' (i, j) =G(x, y)*I (i, j)
(IV.5)
Filtre Passe-bas pour enlever le bruit.
Deuxième étape : calculer le
gradient en chaque pixel de l'image.
La norme du gradient :
(IV.6)
L'angle du gradient :
(IV.7)
Troisième étape :
Approximation de l'angle du gradient à un multiple de 45°
pré.
Quatrième étape :
(IV.8)
Alors
(IV.9)
Cinquième étape : Seuillage
par hystérésis
Soit (Sh , Sb) deux seuils tel que
Sh> Sb
> Alors (x, y) point contour ainsi tous les points
reliés à (x, y) le long du gradient
>
(IV.10)
>
(IV.11)
Resultats :
|
|
|
Image originale
|
L'operateur `'Canny''
|
Figure II. 5 : Détection de contours par
Canny
II.1.1.1.3 Seuillage par hystérésis de
l'image gradient :
Algorithme :
Début
Chargement de l'image IM[i][j]
Lire la valeur des seuils (Sh, Sb) ;
Calcul l'image moyenne : moy[i][j] =(R+G+B) /3 ;
Pour (x=0, jusqu'a x<3)
Pour (y=0, jusqu'a y<3)
S1=S1+(moy[i-x-1][j-y-1]*Sobel[x][y]) ;
S2=S2+(moy[i-x-1][j-y-1]*Sobel[x][y]) ;
S= ;
IMA[i][j]=S;
Si (IMA [j][i]< Sb)
IMA[j][i]=0;
Si (IMA [j][i]>Sh)
IMA[i][j]=IM[i][j] ;
Si (IMA [j][i]<Sh & IMA
[j][i]>Sb)
IMA[i][j]=IM[i][j] ;
fin
fin
Fin
Résultats obtenus :
|
|
|
Image originale
|
Exemple1 : Sb=114, sh=145
|
Figure-II.6 - Seuillage
hystérésis
L'opération de seuillage est une étape
clé dans le domaine de traitement d'image, elle permet le passage d'une
image couleur à une image binaire construite par deux intensités
(que du blanc sur les contours, et du noir), mais le problème majeur du
seuillage est le choix du seuil qui peut donner meilleur résultat comme
il peut donner de mauvais résultat.
II.1.1.2 Approche 2 : Contour
déformable
II.1.1.2.1 Les Snakes :
Les contours actifs, ou `'Snake'', permettent de segmenter des
images par détection de contours.
Leur utilité est
particulièrement bien illustrée en imagerie médicale, les
surfaces intéressantes étant en général des formes
bien régulières.
L'approche classique consiste à déformer un
contour vers le bord de l'objet à détecter, en minimisant une
fonctionnelle définie en fonction de l'image et ayant pour effet de
régulariser la courbe. Depuis, de nombreuses améliorations ont
été apportées au modèle initial. En effet, celui-ci
présentait de nombreux inconvénients : sensibilité
à l'initialisation, au bruit, réglage difficile des
différents paramètres, fausses détections dues à la
présence de minima locaux de la fonctionnelle.
Organigramme :
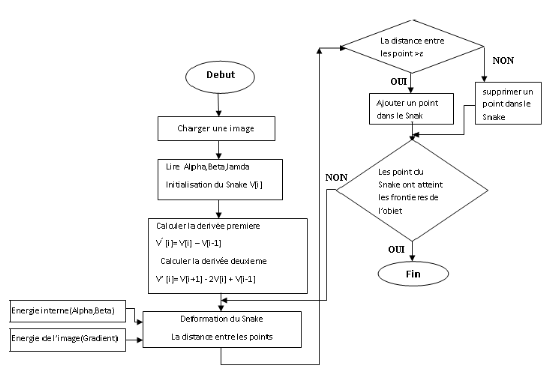
Organigramme IV.3 : Principe du
Snake
Nous avons testé la méthode des contours actifs
sur des images de zone urbaine avec une haute résolution, sans aucun
prétraitement ou amélioration.
Résultats obtenu :

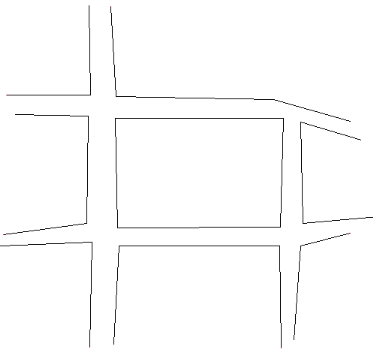
Dans la figure IV.8, nous remarquons que le snake
initial a convergé vers la route dans certains cas, dans d'autre,
à cause d'une part de l'ombre portée des bâtiments sur la
route et d'autre part de l'existence des objets qui occultent la route
(voiture, arbre, marquage au sol) il n'a pas convergé vers la route; car
ces objets changent la radiométrie de la route dont le snake s'appuie
pour optimiser son déplacement.
II.1.1.2.2 Méthode d'ensemble de niveau
zéro Level Set :
a. Avec « Arrêt aux
bords »
Cette méthode est basée sur la définition
d'une fonction (g) appelée `'fonction d'arrêt aux bords'' garantit
l'arrêt de l'évolution de la courbe sur les bord de l'objet
à détecté.
Début
Charger une image ;
Initialiser par ;
Pour chaque itération faire
Pour (x,y) faire
Calculer g () ;
Calcular FA ;
Calcular FG ;
Fin
Calculer ;
Fin
Fin
Cette méthode est simple à
implémenter, mais le problème qui s'impose est que la courbe
arrête son évolution sur les premiers bords trouver, donc on a un
problème de changement de topologie.
b. Sans « arrêt aux
bords » :
Algorithme :
Début
Initialisation de par, n=0
Pour un nombre fixe d'itération faire
Calcule de C1() et
C2(Ø0)
Calcule le terme de la courbure K
Calcule
Fin
Résultats obtenu :
1. Avec arrêt aux bords :

Initialisation de la courbe
 
Résultats après 200
itérations Résultats après 1000
itérations
Figure IV.7 Méthode de Level set avec
« arrêt aux bords »
2-sans arrêt aux bords :

Initialisation de la courbe
 
Résultats après 10
itérations Résultats après 200
itérations
Figure IV .8 Méthode de Level set sans
« arrêt aux bords »
On remarque que si la courbe initial était au milieu de
l'image ?t=0.1, le cycle de réinitialisation est une itération et
=0.001x(255)2. Après 4 itérations la courbe se
stabilise sur les frontières des objets de l'image.
Si on laisse les mêmes conditions, et on change
seulement le ?t vers une valeur maximal (5500), après une seule
itération on a le même résultat que la première
On remarque aussi, que la méthode avec arrêt au
bords donne de bon résultats seulement dans les régions qui ont
un gradient élevé. Il faut que la courbe initiale soit proche et
complètement contenue à l'intérieur de l'objet. Cette
méthode est très lente ; pour faire un changement de
topologie il faut initialiser à l'aide de plusieurs courbes.
La deuxième méthode peut détecter les
objets dont les bords ne sont pas nécessairement définis par un
gradient ; elle permet de faire un changement de topologie à partir
d'une seule courbe initiale ; elle est rapide et donne de bon
résultats.
D'après les essais précédents, il est
claire que la méthode de minimisation d'énergie semble plus
éfficace, plus rapide et plus précise que la méthode
d'arrêt au bord.
Les objets avec des contours lissés ne peuvent pas
être segmenté avec l'approche `'d'arrêt aux bords'', la
courbe va éventuellement se rétracter sur elle-même.
Cependant l'initialisation de l'approche de minimisation
d'énergie nous permet d'aboutir à la segmentation
désirée.
§ Les avantages des LEVEL SETS :
- Prise en compte des changements de topologie automatique.
- Grandeurs géométriques intrinsèques
(normales entrante/sortante, courbure) faciles à calculer.
- Extension à la 3D simple : il suffit d'ajouter une
coordonnée à l'équation d'évolution de la fonction
ö : on a alors un volume ö(x, y, z, t).
- Discrétisation de ö avec une grille définit
dans le domaine de l'image.
- Utilisation des méthodes numériques connues pour
calculer les dérivées.
§ Les inconvénients des LEVEL
SETS :
L'implémentation implique plusieurs
problèmes :
- On doit construire une fonction initiale ö(x, y, z,
t=0) de manière à ce que son niveau zéro corresponde
à la position initiale du contour.
- L'équation d'évolution n'est
dérivée qu'au « Level set
zéro » ; la fonction vitesse v n'est donc pas
définie(en générale) pour les autres Level sets.
- La déformation constante peut causer la formation de
coins saillants sur le modèle initiale lisse. Ce coin peut perturber les
déformations successives, Puisque la définition de la normale
devient ambiguë. Parfois nécessaire de recalculer la fonction
distance par rapport au niveau zéro.
§ comparaison entre les'' Snake'' et'' Level
Set'':
Les modèles paramétriques'' Les
Snake''
- Représentation explicite des modèles sous leur
forme paramétrique pendant la déformation
- Implémentation rapides (temps réel).
- Adaptation à la topologie des objets difficiles.
- Nécessité de réinitialiser les
paramètres de la courbe.
Les modèles géométriques'': Les
Level-Sets (courbes de niveaux) `'
- Représentation implicite des modèles comme un
ensemble de niveaux d'une fonction scalaire de dimension supérieure
- Adaptation à la topologie de ces modèles est
automatique
- Modèles utilisant la théorie de
l'évolution de courbes ou les Level-Sets (courbes/ensembles de
niveaux).
- Les courbes/surfaces évoluent en fonction de mesures
géométriques résultant d'une évolution, et donc
indépendantes de paramètres.
- Les courbes sont représentées comme un ensemble
de niveaux d'une fonction de dimension supérieure.
- Les changements de topologies (fusion, séparation,
etc..) sont gérés automatiquement.
- L'évolution de la courbe s'arrête sur les contours
de l'objet.
- On étudie l'évolution de la courbe en utilisant
uniquement des mesures géométriques (normal, courbure, ...) et
non pas des quantités dépendant de paramètres
(dérivées d'une courbe spécifique).
| 

