La reconstruction tridimensionnelle d'un ensemble de points
informe sur la structure g'eom'etrique de ce même ensemble.
1.4.1 Les deffirentes approches de la reconstruction
tridemensionnelle
· Reconstruction projective
Quand les points sont d'efinis dans un repère
projectif. Une telle reconstruction ne contient donc pas d'information critique
(absence de la notion d'angle, de longueur, parall'elisme ... ).
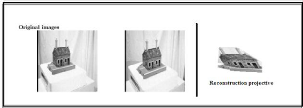
FIG. 1.2 - Une reconstruction projective a` droite
· Reconstruction affine
Quand les points sont définis dans un repère
affine. Une telle reconstruction contient des informations affines (rapport de
longueurs, parallélisme).
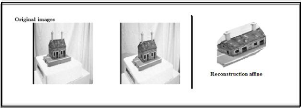
FIG. 1.3 - Une reconstruction affine a` droite
· Reconstruction euclidienne
Quand les points sont définis dans un repère
euclidien. Cette dernière reconstruction est la plus riche; elle
contient les informations que l'homme a l'habitude de manipuler. Nous parlerons
dans ce cas de reconstruction euclidienne, car le facteur d'échelle
absent ici ne pose pas de problème particulier.
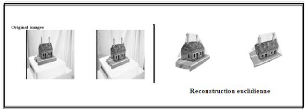
FIG. 1.4 - Une reconstruction euclidienne a` droite
Il existe de nombreuses techniques de reconstruction 3D, On
peut répertorier une grande partie des méthodes de reconstruction
dans ces quatre catégories :
· Reconstruction a` partir de la texture (Space carving
[KUT00]) : Cette méthode basée sur le calcul d'un critère
de photoconsistence nécessite d'avoir une lumière constante et
homogène tout autour de l'objet.
· Reconstruction a` partir de la géométrie
épipolaire[HAR00] : C'est la méthode la plus classique
étant donnéqu'on utilise déjàla
géométrie épipolaire pour initialiser l'asservissement
visuel et que l'on peut estimer les positions des caméras.
· Reconstruction a` partir des contours [BOY97], [LAU95]
: Baser la reconstruction 3D sur les contours de l'objet semble être
difficilement envisageable sur un objet naturel de forme quelconque avec des
contours très irréguliers.
· Reconstruction a` partir du mouvement de la caméra
(Factorisation de Tomasi et Kanade) [TRI96].
1.5.1 La vision stéréoscopique
1.5.1.1 Principe
La Vision Stéréoscopique vise a` reconstruire
la structure 3D d'une scène. Afin de réaliser cette
reconstruction il est nécessaire de connaitre les coordonnées 3D
de tous les points d'une scène. La scène est
représentée par un couple d'images stéréoscopique.
Ces images sont deux représentations de la scène prises sous des
angles différents. Chaque point de la scène est
projetédans les images de la paire stéréoscopique a` des
positions différentes. En vision stéréoscopique pour
disposer des coordonnées 3D d'un point il faut disposer des
coordonnées de ses deux projections, respectivement dans les images
gauches et droites. L'obtention des coordonnées de ces deux projections
d'un même point 3D est réalisée gràace a` une phase
d'appariement qui vise a` trouver, pour un point donnédans une image,son
point correspondant dans l'autre image. Ces deux points sont les projections
respectives du même point 3D dans les images droite et gauche.
Le principe de la vision stéréoscopique est
résumédans le schéma synoptique de la figure 1.5. Il est
a` noter qu'en amont des étapes de la figure 1.5 il est
nécessaire de réaliser la calibration du système
stéréoscopique de facon a` disposer des
paramètres intrinsèques et extrinsèques du système.
Ces paramètres seront essentiels dans les phases de rectification et de
calcul des positions 3D des points.
La stéréoscopie procède par appariement
puis une triangulation
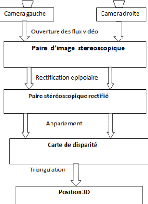
FIG. 1.5 - Synoptique g'en'eral de la vision st'er'eoscopique
.
1.5.1.2 L'appariement
Il consiste a` d'eterminer les projections qui se
correspondent dans deux images,c'est a` dire quels sont les points 2D
repr'esentant les projections d'un même point 3d. Un appariement est donc
un n-uplet de points 2D en correspondance
1.5.1.3 La triangulation
C'est une technique d'interpolation de surface, et
l'interpolation de surface est le passage du modèle volumique au
modèle surfacique. On peut classer la triangulation en deux cat'egories
qui sont
· Celle qui s'appuie sur une surface d'efinie
implicitement.
· Celle qui s'appuie sur un nuage de points repr'esentant
la surface de l'objet
1. La triangulation des surfaces implicites
1. L'algorithme des marching cube
Afin de repr'esenter un volume de donn'ees, on divise ce
volume en petits cubes, on fixe un seuil de densit'e par lequel va passer la
surface et, a` l'aide des points d'intersection entre les cubes et la surface
on polygonise cette dernière et on affiche le r'esultat a` l''ecran. La
première difficult'e sous-jacente a` cet algorithme est que, si l'on
traite tous les cas de façon s'epar'ee, on a 256 possibilit'es a`
traiter (il existe 256 façons qu'une surface courbe peut intersect'e les
arêtes d'un cube). Heureusement,
en mettant a` contribution la sym'etrie de rotation on peut
r'eduire ce nombre a 23 cas qu'il nous faut traiter s'epar'ement. Dans
l'article de Cline et Lorensen [LC87], on parle ici de 14 cas au lieu de 23 car
les sym'etries de r'eflexions sont aussi mises a` parti. Cependant,
après une 'etude approfondie de la question, il s'est av'er'e que si les
symetries de r'eflexion sont utilis'ees des trous ou des inconsistances seront
g'en'er'ees dans la surface. Ceci vient du fait que, dans certains cas, la
surface se trianguler de façon diff'erente si les sommets du cube qui
'etaient a` l'int'erieur de l'objet passent a` l'ext'erieur et vice-versa. Par
exemple si l'on regarde les figures 1.6 et 1.7 qui sont la sym'etrie l'une de
l'autre, on peut voir que la surface peut se trianguler de deux façons
diff'erentes (les points noirs repr'esentent les sommets du cube a`
l'int'erieur de l'objet).
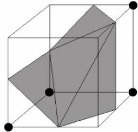
FIG. 1.6 - Une configuration possible d'un cube triangul'e.
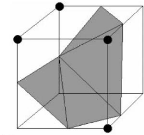
FIG. 1.7 La configuration miroir d'un cube triangul'e.
2. Triangulation a` partir d'un nuage de points
Construction d'un nuage de points pour chaque
voxel1 surfacique en estimant le point par lequel passe la
surface,la densit'e du voxel et la normal sont utilis'e pour estimer la
position de ce point.
1.5.2 Reconstruction a` partir de géométrie
epipolaire
Les principales 'etapes sont repr'esent'ees sur la Figure1.8
.L'extraction de points et l'appariement se font exactement comme pour
l'asservissement visuel, a` la diff'erence que l'on travaille sur une s'equence
d'images. L''etape de calibration de la paire st'er'eo doit se faire sur des
images prises sur le site sans changer les paramètres
intrinsèques et extrinsèques des cam'eras. Les paramètres
intrinsèques varient en fonction du changement de focale. On utilisera
une mire car l'autocalibrage est plus contraignant, n'ecessitant des mouvements
sp'ecifiques de la cam'era. On supposera que les paramètres
intrinsèques ne varient pas durant toute la phase d'acquisition des
images. Une première reconstruction projective est alors r'ealis'ee pour
initialiser la suite de la reconstruction, par une m'ethode d'ajustement de
faisceaux (Bundle Adjustment).
Ensuite un appariement dense des points appartenant a` la
structure est calcul'e a` partir de, paires d'images rectifi'ees (La
rectification des images est 'egalement utilis'ee pour l'appariement des points
servant a` l'asservissement des cam'eras. Enfin une carte de profondeur dense
est calcul'ee pour chaque point appari'e, puis les points 3D sont reli'es entre
eux par triangulation (Delaunay). Le plaquage de textures sur les surfaces
finit de donner un aspect photo-r'ealiste a` l'objet reconstruit.
Cette m'ethode de reconstruction doit être appliqu'ee
sur chaque sous-ensemble de s'equence d'images correspondant a` chaque position
du robot autour de l'objet, puis les diff'erentes parties reconstruites sont
alors assembl'ees. Il est courant de reconstruire a` partir de sous-ensembles
d'images puis de fusionner les modèles partiels ainsi obtenus par une
phase d'alignement 3D. Les algorithmes de reconstruction et d'alignement
s'appuient sur des correspondances de points ou de droites entre les images. La
localisation de ces points ou droites dans les images est affect'ee par un
bruit de mesure, influencant la qualit'e des modèles 3D
reconstruits.
'Des images 3D sont des images qui représentent une
sc`ene en trois dimensions. Le » pixel » est alors appeléun
voxel, et représente un volume élémentaire.

FIG. 1.8 Méthode de reconstruction.
1.5.3 Technique bas'e sur les ombrages ou Shape from shading
Comme son nom l'indique, il s'agit d'extraire une forme a`
partir des variations de lumières observées sur la surface d'un
objet [ZHA 99], [KOZ 98] au début elle était très peu
utilisée dans les systèmes de vision, une des raisons de cet
état de fait est l'absence d'algorithmes robustes capables de retrouver
les détails fins et discriminants des surfaces des objets (voir figure
1.9). Récemment des études de possibilitéd'utiliser le
shape from shading SFS dans la reconnaissance d'objets 3D sont faites [KOZ
98].
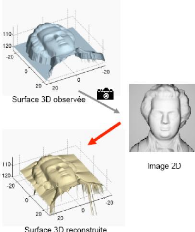
FIG. 1.9 - application de la SFS sur une image 2D.
1.5.4 Repr'esentation par d'etection de d'eformation de
formes
Cette approche décrit une nouvelle
représentation des formes déformables basées sur des
polygones triangulaires (voir figure 1.8), [BAR 98][Cou 2000][Blu 67]elle
cherche une structure de correspondance de calibre déformable, o`u on
veut trouver une transformation non rigide qui dresse la carte d'un
modèle a` une image. Le problème poséest la correspondance
de la forme a` l'image, ce dernier est défini en termes d'une fonction
d'énergie. Cette fonction d'énergie associe un coàut a`
chaque transformation potentielle du modèle. Typiquement la fonction
d'énergie est une somme de deux termes, le premier rapproche le
modèle déformé, des caractéristiques d'image,
tandis que le deuxième pénalise les grandes déformations
du modèle. La recherche sur des transformations est faite efficacement
en
exploitant les propriétés de cette
représentation pour les formes déformables. Cette approche donne
une solution optimale globale au problème de correspondance qui permet
de détecter des objets déformables sans aucune sorte d'occlusion
et le désordre de fond.

FIG. 1.10 - polygones triangulaires d'un lapin et d'une
poire.



