1.5.6 La reconstruction par des jonctions
caractéristiques
Cette méthode est proposée par R.BERGEVIN et
A.BUBEL [Het 95]. Elle est basée sur l'extraction des branches de
jonction d'objets tridimensionnels aux points d'intérêt dans une
image 2D en utilisant un processus de regroupement topologique (Figure1.12).
Pour la reconstruction des objets 2D, avec cette
méthode il faut construire un graphe, o`u les noeuds sont les points de
jonctions, les arcs sont les contours participant a` la jonction, en suite ce
graphe est exploitépour extraire la structure des contours composant
l'objet .Le principe de cette méthode est de subdiviser l'image en
petites fenêtres pour faciliter l'extraction des jonctions possible.
Chaque fenêtre est analysée en la binarisant, puis on extrait les
branches en appliquant des opérateurs qui mettent en évidence les
lignes de
direction prédominantes [ZHO 96]. A la fin, l'ensemble
des branches extraites est organiséen graphe et les positions de
jonction extraite sont structurellement validées puis
raffinés.

FIG. 1.12 - Type de jonction
1.5.7 Shape From Motion : Reconstruction a` partir du
mouvement
L'analyse du mouvement et l'interprétation visuelle
d'une sc`ene sont extrêmement liés. En particulier, le mouvement
du capteur autour d'un objet peut permettre a` l'observateur de mieux
comprendre la forme et la structure de l'objet. En
réalitél'origine du mouvement revient a` trois fqcteurs facteurs
:
· Le mouvement de l'observateur en respectant la sc`ene
(Déplacement de la caméra dans le cas de la
stéréoscopie)
· Ou le mouvement des objets dans la sc`ene
· La camera et l'objet de la sc`ene se deplacent Le domaine
de suivi de mouvement se divise en deux taches principales :
· Détection de mouvement : consiste a` trouver les
objets en mouvement dans la sc`ene par l'utilisation des séquences
d'images captées a` des moments différents.
· Estimation de mouvement : consiste a` estimer le
déplacement de certaines primitives de l'image.
Différentes approches (approche de flot optique,
approches de mise en correspon-
dance; sont utilisées pour la
détermination de mouvement et la structure tridimen-
sionnelle de l'objet. Cette dernière, consiste a`
trouver les coordonnées 3D d'un points P a` partir d'une séquence
d'images. En déplacant une caméra autour d'un objet,
on peut construire sa structure tridimensionnelle.
1.5.7.1 L'approche basée sur la mise en correspondance
Cette approche utilise les techniques de l'appariement des
indices pour l'estimation du mouvement et le suivi d'objets, ces primitives
sont généralement des coins, des segments [Mar 01]. La suite des
positions de ces indices visuels dans plusieurs images permet, si l'on utilise
suffisamment d'indices appartenant au même objet d'obtenir le mouvement
3D de celui ci. Le principe consiste en un système a` huit
équation de la forme
E = T × R
tel que T est une translation et R est une rotation,
connaissant huit points de l'objet, la décomposition de E en valeurs
singulières permet de retrouver les paramètres du mouvement et la
structure 3D. L'estimation du mouvement a` partir des droites donne de
meilleurs résultats que ceux donnés par des points
caractéristiques.
1.5.7.2 L'approche du flot optique
L'utilisation de cette méthode consiste a` extraire
l'information de la vitesse a` partir d'une séquence d'images avec
l'hypothèse que l'intensitédes pixels des objets est
conservée au cours du déplacement. Le calcule du flux optique
consiste a` extraire un champ de vitesses a` partir d'une séquence des
images en supposant que l'intensité(ou la couleur) est conservéau
cours du déplacement. Sous cette hypothèse, on peut
établir une relation entre la vitesse apparente v (déplacement
dans l'image d'indices visuels tels que des régions
délimitées par des contours supposéreprésenter la
projection du mouvement 3D des objets de la scène et /ou du mouvement de
la caméra) et les variations spatio-temporelles de
l'intensité.
Le principe de cette technique est résumédans les
quatre étapes suivantes :
1. La caméra prend plusieurs images de la
scène.
2. Détection de mouvement (approche de flot optique, mise
en correspondance).
3. Estimation de mouvement (angles de rotation, matrice
fondamentale, vecteurs de translation. . .etc.)
4. Estimation de la carte de profondeur .
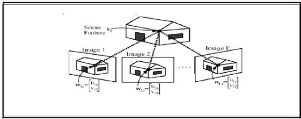
FIG. 1.13 - Processus de reconstruction 3D a` partir d'un
mouvement
5. Reconstruire le modèle 3D d'après la carte de
profondeur calculée.
1.5.8 Méthode par space carving (creusage d'un volume
3D)

FIG. 1.14 - Méthode par space de l'objet
· Algorithme Algorithme de space carving [PMJ2009])
1. Initialiser un volume englobant fait de N x M x P voxels
2. Choisir un voxel sur la surface courante
3. Projeter ce voxel sur les caméras sur lesquelles il
est visible
4. 'Eliminer (ou << creuser >>) si non
photo-cohérent
5. Répéter 2-3-4 jusqu'`a convergence
| 

