3.5 Résultat d'experimentation
3.5.1 Application a` des images de synthése
Dans la suite on va présentéles résultats
obtenus On va appliquer nos algorithmes sur une séquence de trois
images,voir la figure suivante :
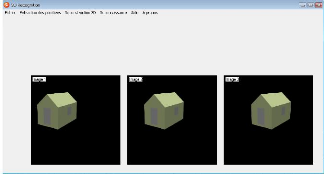
FIG. 3.3 - Une sequence de trois images.
Suivi avec les segments de droite
La premiere chàose a` faire est d'extraire les contours
des images de la sequence, puis on effectue une segmentation de contours par
une approximation de contours en segment de droite. La figure suivante montre
le résultat
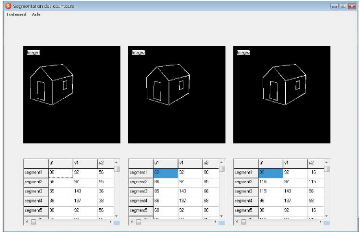
FIG. 3.4 - Extraction des segment de droite des trois
images.
Calcul des angles de rotation : Aprés qu'on a extrait
les segments de droite de la séquence d'images, on a
appliquél'algorithme de suivi 3.4.1.2, on aura le resulatat suivant :
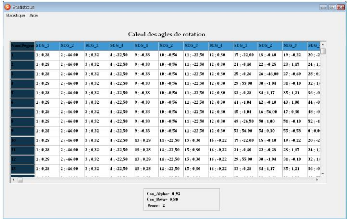
FIG. 3.5 - Calcul des angles de rotation.
La carte de profondeur : Le calcul de la carte de profondeur
consiste a` calculer les coordonnées tridemensionnelle (X,Y,Z).
Apres qu'on a trouvéles angles de rotation á et 3 ,
on remplace ses valeurs dans les formules de X,Y et Z. Le resultat est
montrésur la figure
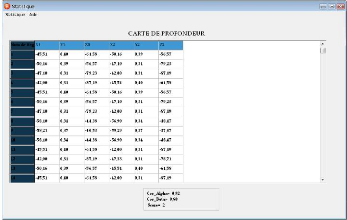
FIG. 3.6 - La carte de profondeur.
La reconstruction projective : La reconstruction 3D est la
présentation tridemensionnelle de la sc`ene. Apres qu'on a
trouvéla carte de profondeur,on peut donc utiliser les valeurs de X,Y et
Z pour une reconstruction projective le résultat est montrésur la
figure suivante
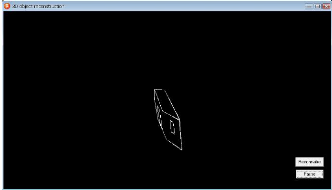
FIG. 3.7 - La reconstruction projective de la scene.
Localisation de l'objet polyédrique : La localisation de
l'objet consiste a` determiner sa position dans scene pour une eventuelle
identification. Apres qu'on a arrivéa` une reconstruction projective de
la sc`ene, nous avons appliqués l'algorithme que nous avons
développés pour la localisation de l'objet polyedrique. On a
obtenu le resultat suivant :
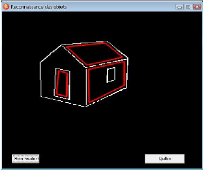
FIG. 3.8 - Localisation de l'objet dans la scene.
3.5.2 Application a` des images réelles
Dans la suite on va appliquer nos algorithme sur une
séquence de trois images captées par une camera en mouvement de
rotation.
La figure suivante montre la sequence d'images
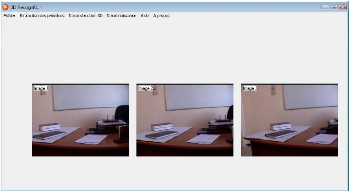
FIG. 3.9 - Sequence d'image reelle
Suivi avec les segments de droite
On extrait les contours des images de la sequence, puis on
effectue une segmentation de contours par une approximation de contours en
segment de droite. La figure suivante montre le résultat
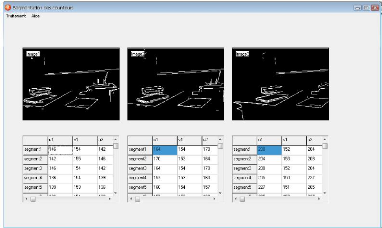
FIG. 3.10 - Extraction des segments de contours
Calcul des angles de rotation :
Apres l'extraction des segments de droite des trois images on a
appliquél'algorithme de la section 3.4.1.2 ,on aura le
résultat suivant :
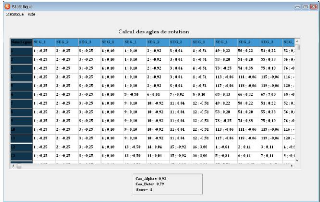
FIG. 3.11 - Calcul des angle de rotation
La carte de profondeur
On remplace la valeur de á et 3 dans les formules de X,Y,Z
.Le resultat est montrésur la figure suivante :
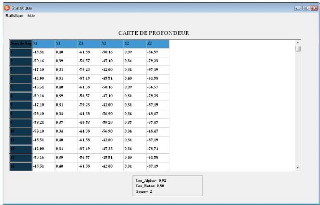
FIG. 3.12 - La carte de profondeur
La reconstruction 3D
La carte de profondeur est calculédonc on peut l'utiliser
pour la reconstruction projective, le resultat obtenu est montrésur la
figure
FIG. 3.13 - La scene reconstruite
Localisation de l'objet polyédrique
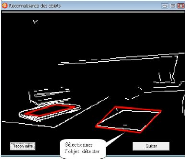
FIG. 3.14 - Localisation de l'objet dans la scene
3.6 Conclusion
Dans ce présent chapitre nous avons montrés
l'algorithme dévloppépour la localisation tridemensionnelle,bien
sàur a` partir d'une scene reconstruite. On a vu que pour se faire il
faut calculer la carte de profondeur, ainsi nous avons
présentél'aspect théorique et algorithmique de la
méthode qui nous a permet de faire le suivi et la mise en correspondance
d'un groupe de segments dans une séquence d'image prise par une
caméra en mouvement. Les résultats d'expérementation sur
des images de sinthése ont montrés la faisabilitéde
l'algorithme,et sur les images réelle ont confirméque
l'algorithme pouvais bien localiser certains formes dans la scéne.

| 

