3.3 Calcul de la carte de profondeur
3.3.1 Modèle géométrique de
système de vision [Ait06]
3.3.1.1 Description du système
La figure 2.1 nous illustre un modèle
géométrique d'un système de vision
stéréoscopique non anthropomorphe (est un système dont les
axes des caméras ne sont pas coplanaires), équipéde deux
caméras en mouvement de rotation. Dont on a :
- IM1 (resp. IM2) est le plan de projection de la camra1 (resp.
camra2), - L1, L2 : les lentilles des deux caméras (centres
optiques),
- P1, P2 : points d'impact des axes optiques sur les plans IM1,
IM2,
- (P1, U1, V1) : repère cartésien
orthonormé-dit théorique- liéau plan IM1, construit ainsi
:
- P1U1 est parallèle aux lignes de l'image IM1,
- P1U1 est parallèle aux colonnes de l'image IM1 (sur une
caméra CCD1 les lignes sont perpendiculaires aux colonnes
[ABI89]),
- l'unité, que ce soit sur O1U1 ou
O1V1 est soit le pixel ou le millimètre (mm). Le passage
d'une unitéa` l'autre (pixel-mm par exemple) obéit a` la
transformation suivante :
U1 = (ex).u1
'Charged Coupled Device
V1 = (ez).v1
Sachant que (ex, ez) représentent les facteurs de
changements d'échelle et (U1, V1) (resp. (u1, v1)) Les
coordonnées d'un point image dans le système o`u
l'unitéest le pixel (resp. le mm)
- (P2 U2 V2) : repère cartésien
orthonormé-dit théorique- lier au plan IM2, construit de
manière analogue a` (P1 U1 V1),
- (O1 x1 y1 z1) [resp. (O2 x2 y2 z2)] : Repère
cartésien orthonormé-dit théorique- liéa` la camra1
(resp la camra2) construit de la manière suivante :
- O1 (resp. O2) est situésur l'axe optique de la
camra1 (resp. camra2) a` une distance d1 (resp. d2) de P1 (resp. P2). La valeur
de d1) (resp. d2)) peut varier d'un mouvement a` un autre ; le centre de
rotation de la caméra n'est pas connue et peut changer a` chaque
rotation (voir figure)
- O1O1 (resp. O2O2) est
parallèle a` P1V1 (resp. P2V2),
- L'unitéutilisée sur ce repère est le
mm,
- O1x1 et O2x2 sont colinéaires.
- è1 ( resp. è2 ) : angle de rotation de la camra1
(resp. camra2) autour de l'axe O1z1 (resp. O2z2),
- p : distance entre O1 et O2,
- è2 : angle d'inclinaison de la camra2 par rapport a` la
camra1 ;
- f : distance focale.
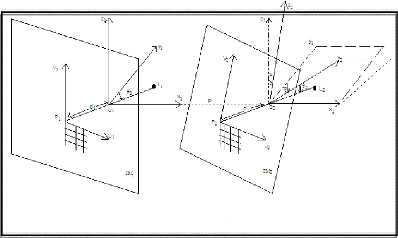
FIG. 3.2 - Modélisation géométrique de la
tête de vision stéréoscopique.
3.3.2 Coordonnée projectifs avant et après
rotation
Un point P(x,y,z) se projette sur le plan image en un point
P1(U1); V1)) sur l'image1, et en un point P2(U2); V2)) sur image2, comme sera
montrédans les fonctions suivantes :
· Avant rotation
(a) Sur IM1
|
U = (ex).f.
|
- cos(è1).x + sin(è1).y
|
|
sin(è1).x + cos(è1).y + d1 - f
|
|
V = (ez).f.
|
-Z
|
|
sin(è1).x + cos(è1).y + d1 - f
|
(b) Sur IM2
|
U2 = (ex).f.
|
- cos(è2).(x - p) + sin(è2).(y. cos(?) + z.
sin(?))
sin(è2).(x - p) + cos(è2).(y. cos(?) + z. sin(?)) + d2
- f
|
sin(?).y - cos(?).z
V2 = (ez).f. sin(è2).(x - p) + cos(è2).(y. cos(?) +
z. sin(?)) + d2 - f
Apres un certain nombre de rotation des caméras d'un
angle (a1 ,a2 ) autour de O1z1 (resp.O1z2 ) a` partir de sa position
de départ a1 (resp. a2 ); Les cordonnées de projection du point
objet P(x,y,z) sur les deux images IM1 et IM2 changent.
(a) i. Sur IM1
|
U = (ex).f.
|
- cos(è1 + a1).x + sin(è1 + a1).y
|
|
sin(è1 + a1).x + cos(è1 + a1).y + d1 - f
|
|
V = (ez).f.
|
-Z
|
|
sin(è1 + a1).x + cos(è1 + a1).y + d1 - f
|
ii. Sur IM2
cos(è2 + a2).(x - p) + sin(è2 + a2).(y. cos(?) +
z. sin(?))
Uk 2 = (ex).f. sin(è2 + a2).(x - p) + cos(è2 +
a2).(y. cos(?) + z. sin(?)) + d2 - f
3.3.3 Relations entre les cordonnes 2D et 3D
|
u1 = ex.f
|
- cos(è1).x + sin(è1).y
|
|
sin(è1).x + cos(è1).y + d1 - f
|
-z
sin(è1).x + cos(è1).y + d1 - f
On note que x=X.(d1-f) ,y=Y.(d1-f) donc on aura
v1 = ex. f
- cos(è1).X + sin(è1).Y
u1 = ex.f sin(è1).X + cos(è1).Y + 1 (1)
|
v1 = ex.f
|
-Z
sin(è1).X + cos(è1).Y + 1 (2)
|
On divise (1) sur (2), on aura
.Y (3)
X
?
R
?
R?..Z = cos(è1).X - sin(è1).Y
cos(è1) sin(è1) Z = .
R
|
uk = ex . f
1
|
- cos(è1 + á).x + sin(è1 +
á).y
sin(è1 + á).x + cos(è1 + á).y + d1 -
f
|
On a aussi
vi = ex.f
-z
sin(è + á1).x + cos(è1 + á).y + d1 -
f On note que x=X.(d-f) ,y=Y.(d-f) donc on aura
|
uk = ex.f
1
|
- cos(è1 + á).X + sin(è1 + á).Y
(4)
sin(è1 + á).X + cos(è1 + á).Y + 1
|
|
vk1= ex.f
|
-Z
(5)
sin(è1 + á1).X + cos(è1 + á).Y +
1
|
On remplace (3) dans (5)
|
vi = ez. f.
|
cos(è1) 1 .X + sin(è1)
1 .Y
R0 R0
|
|
sin(è1 + á1).X + cos(è1 + á).Y + d1
- f
|
Donc on a
X.(sin(è1 + á).vk1 +
ez.f cos(è1) )+ Y.(vk 1.
cos(è1 + á) - ez.f.sin(è1) ) + v1 = 0
R0 R0
1 1
On remplace :
A = sin(è1 + á).vk1 + ez.f
cos(è1)
R0 1
B = vk1. cos(è1 + á) -
ez.f. sin(0è1)
1
C = v1
|
Donc on a
A.X + B.Y + C = 0 X =
On remplace x dans (4) on aura
|
-B.Y - C
|
|
A
|
|
uk1 = ex.f
|
- cos(è1 + á). A (-B.Y-9 +
sin(è1).Y
|
|
sin(è1).(-B.X-C) +
cos(è1).Y + 1
|
|
sin(è1).(
|
-B.Y - C
A ).uk 1+uk 1.
cos(è1).Y +uk 1 = ex.f(- cos(è1+á).(
|
-B.Y - C A )+sin(è1).Y
|
1 +uk1 . sin(è1+á).C+ex.f.
cos(è1+á).C
(-uk )
Y = A
-ex. f.sin(è1+ á) + uk1.
cos(è1 + á) . sin(è1+á).B-Aex.f.
cos(è1+á).B
3.3.4 Conclusion
Dans cette section on a présentécomment calculer
la 3eme coordonnée a` partir des coordonnées 2D par
les différentes équations et leur démonstration .
Après qu'on a trouvéla relation entre les coordonnées 2D
et les coordonnées 3D, on remarque que, pour déterminer X, Y, Z
il nous faut d'abord déterminer les angles de rotation á et
è ; et pour cela nous allons exploiter le suivi d'un groupe de segments
dans une séquence d'image.
3.4 Suivi d'un segment dans une s'equence
d'images [ISR07]
Soit v0 = ai,0.u0 + bi, 0 l'equation d'un segment i dans une
image o`u ai,0 est la pente du segment i dans l'image0 et (u0,
v0)les coordonnees 2D d'un point de segment de droite.
-a0 cos (á
exb f
D'apr`es certaines transformations on aura : ak. sm " = 0 =
(a) .
ä
Remarque :
Nous pouvons constater que l'expression des coordonnees images
d'un point est de même forme dans les deux images (gauche et droite).
C'est pourquoi, la relation entre les pentes des segments de droite dans les
images successives droites va être de la même forme que celle
obtenue par les segments des images gauches, donc il suffit de developper la
relation sur les donnees de l'image IM1.
3.4.1 'Equation de mouvement d'un segment I :
,
Apr`es rotation d'un angle á : ai 1-ai,0
cos(á)sin(á) = bi,0
ex.f (6)
Apr`es rotation d'un angle â : ai,1-ai,0 cos(â)
sin(â) = bi,0
ex.f (7)
3.4.1.1 Application de la m'ethode
A partir du rapport entre les deux equation (6) et (7) on peut
deduire que :
|
ai,1-ai,0 cos(á) ai,2-ai,0 cos(â) =
|
sin á
sin â
|
Si on applique le même principe pour le segment j on
obtient : aj,1-aj,0 cos(á) aj,2-aj,0 cos(â) =
sin á
sin â
ai,1-ai,0 cos(á) cos(á)
A partir de cette derni`ere equation on aura
cos(â) aj,2-aj,0 cos(â)
(aj,1.ai,0-ai,1.aj,0. cos(â))+(ai,2.aj,0-aj,2.ai,0.
cos(á)+(aj,1.ai,2-ai,1.aj,2) =
0 si on remplace
c1 = aj,1.ai,0 - ai,1.aj,0
c2 = ai,2.aj,0 - aj,2.ai,0
c3 = aj,1.ai,2 - ai,1.aj,2
On aura :
c1 cos(â) + c2 cos(á) + c3 = 0 (A)
C'est une equation a` 2 inconnus, pour resoudre cette equation il
faut une autre equation a` 2 inconnus, pour cela il suffit de prendre 2 autres
segments
k et l, on aura : cp,1 cos(â) + cp,2
cos(á) = cp,3 (B)
Tel que :
cp,1 = al,1.ak,0 -- ak,1.al,0
cp,2 = ak,2.al,0 -- al,2.ak,0
cp,3 = al,1.ak,2 -- ak,1.al,2
La resolution de ce système d'equations (A) et (B) :
{
c1. cos(â) + c2. cos(á) = c3 cp,1. cos(â)
+ cp,2. cos(á) = cp,3 Si det(c1 * cp,2 -- c2 * cp,1) =6 0
Alors :
cos(á) = ((c3*cp,2)-(cp,3*c2))
det
cos(â) = ((c1*cp,3)-(c3*cp,1))
det
La resolution de ce système necessite 4 segments dans 3
sequences d'images. La valeur de la solution est le mouvement effectuepar la
camera pour l'obtention de l'image suivante donc une valeur qui reste constante
si les segments consideres correspondent aux bons appariements. Nous pouvons
enoncer la proposition suivante :
proposition :Soient i, j, k, l quatre segments de IM0, de IM1
i1, j1, k1l1 et i2,j2, k2, l2 de IM2 Les valeurs cos(á)et
cos(â)obtenues après resolution du système correspondent
aux mouvement reel de la camera si et seulement si chaque triplet de segments
(i, i1, i2),(j, j1, j2), (k, k1, k2),(l, l1, l2) contient le
même segment dans les differentes images. La solution ayant engendrele
plus grand score en nombre de quadruples de segments obtenus, sera la bonne
solution. Ainsi nous pouvons dire que nous avons résolu
deux problèmes : le problème d'appariement et celui du mouvement
des caméras.
3.4.1.2 Algorithme De Suivi :
Début
Extraction de contour de chaque image (IM1; IM2; IM3) Segmente
les images (IM1; IM2; IM3)
Extraction de primitives (segments de droite) de IM1; Calculer la
pente de chaque segment de IM1
Extraction de primitives (segments de droite) de IM2; Calculer la
pente de chaque segment de IM2;
Extraction de primitives (segments de droite) de IM3; Calculer la
pente de chaque segment de IM3;
Regrouper en groupe de quatre les segments de IM1 dans T1;
Regrouper en groupe de quatre les segments de IM2 dans T2; Regrouper en groupe
de quatre les segments de IM3 dans T3; - Pour tout groupe de segments de IM1
faire
- Pour tout groupe de segments de IM2 faire
- Pour tout groupe de segments de IM3 faire
- Calculer (cos a, cos â)
- Fin pour
- Fin pour
- Fin pour
Calculer le score pour chaque solution trouvée;
Choisir les groupes de segments qui engendrent le plus grand
score;
Etablir la correspondance entre les segments de droite dans les
différentes images ayant engendrés le plus grand score.
Fin.
Remarque :
- Les valeurs de cos(a)et cos(â)correspondent au mouvement
effectuépar la caméra.
- - La bonne solution de cos(a) et cos(â) correspond a` la
valeur ayant engendrée le plus grand score.
Conclusion (Méthode ) :
l'avantage de cette méthode est qu'elle permet de
résoudre le problème d'estimation du mouvement.
On remplace cos(á) ou cos(/3)dans les formules
précédentes, on aura les coordonnées 3D (X, Y, Z) de
chaque point de l'image.
| 

