II.2.5. Développement du Modèle
mathématique selon Newton-Euler [5-6-7-8]:
En utilisant la formulation de Newton-Euler, les
équations sont écrites sous la forme suivante:
|
(II.18)
|
Avec æ : est le vecteur de position du
quadri-rotor
m : la masse totale du quadri-rotor
? : La vitesse angulaire exprimée dans
le repère fixe
R : La matrice de rotation
? : Le produit vectoriel
|
|
Chapitre II Modélisation dynamique d'un
quadrotor
???????? ????????, ???????? ????????, ???????? ????????: Les
coefficients des frottements aérodynamiques.
21
J : matrice d'inertie symétrique de dimension
(3x3), elle est donnée par :
???????? 0 0
???? = ~0 ???????? 0 ~ (II.19)
0 0 ????????
????(Ù) : est la matrice antisymétrique; pour un
vecteur de vélocité Ù = [????1 ????2 ????3] ???? , elle
est donnée par:
0 ?Ù3 Ù2
????(Ù) = ~Ù3 0 ?Ù1 ~ (II.20)
?Ù2
Ù1 0
???????? : est la force totale générée par
les quatre rotors, elle est donnée par :
????????= ????× [0 0 ? ????????
4 ????=1 ]???? (II.21)
???????? = ????????????2 (II.22)
???????? : La force de traînée selon les axes
(x, y, z), elle est donnée par :
-???????????????? 0 0
???????? = ~0 -???????????????? 0 ~ ????? (II.23)
0 0 -????????????????
????????????????, ????????????????, ???????????????? : Les
coefficients de traînée de translation, ???????? : Force de
gravité, elle est donnée par :
0
???????? = ~0 ~ (II.24)
-????????
???????? : Moment provoqué par les forces de
poussée et de traînée.
????(????4 - ????2)
???????? = ~????(????3 - ????1) ~ (II.25)
2
????(????12 - ????22
+ ????32 - ????4)
????????: Moment résultant des frottements
aérodynamiques, il est donnée par :

???????? ????????????? 2~????????
?????????????????????
???????? ???????? ?????2
=
2 (II.26)
Chapitre II Modélisation dynamique d'un
quadrotor
22
II.2.5.1. Equations de mouvement de translation :
On a:
·
???????? = ???????? + ???????? + ???????? (II.27)
On remplace chaque force par sa formule, on trouve :
????
|
????· ????????????????????????+
~ ????· ~ = ~ ???????????????????????? -
????· ????????????????
|
????????????????
???????????????? ~
|
4
? ????=1
|
????????
|
-
|
???????? ?????????????
~ ???????? ????????????? ~
???????? ???????????? ?
|
-
|
0
~ 0 ~
????????
|
(II.28)
|
|
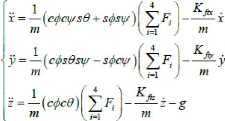
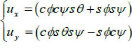
On obtient alors les équations différentielles qui
définissent le mouvement de translation :
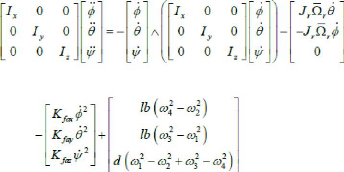
II.2.5.2. Equation de mouvement de rotation :
On a:
????Ù? = -????????h - ????????h - ???????? +
???????? (II.30)
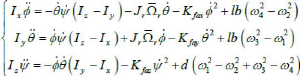
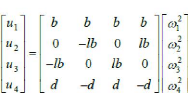
On remplace chaque moment par la formule correspondant, on
trouve :
On obtient alors les équations différentielles
définissants le mouvement de rotation :
Chapitre II Modélisation dynamique d'un
quadrotor
23
Avec : fr
|
= W1 - W2 + W3 - W4
(II.33)
|
|
En conséquence, le modèle dynamique complet qui
régit le quadrotor est le suivant :
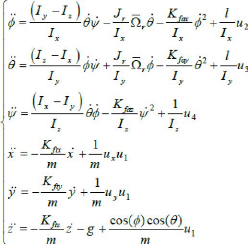
Avec :
Et :
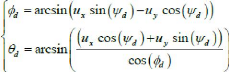
A partir de (II.35), on trouve :
| 

