II.2. Equations d'un
système linéaire
Dans toute la suite du cours, les systèmes
considères n'auront qu'une entrée et qu'une sortie.
II.2.1. Introduction
Un système est dit linéaire si l'équation
liant la sortie à l'entrée est une équation
différentielle linéaire à coefficients constants. La forme
générale de cette équation différentielle est :

III.2.2. Exemples
R
Soit le circuit RC
C
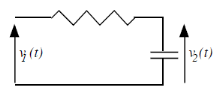
Figure 2.3. Circuit RC
v1 =e(t) et v2=s(t)
Les équations électriques sont :
e(t) = R.i + s(t)



 , introduisant Laplace dans les deux membres, il vient : , introduisant Laplace dans les deux membres, il vient :
 , et la sortie par rapport à l'entrée on aura : , et la sortie par rapport à l'entrée on aura :
 (Système du premier ordre), puisque le dénominateur est
un polynôme du premier degré en p, où* p est
l'opérateur de Laplace. (Système du premier ordre), puisque le dénominateur est
un polynôme du premier degré en p, où* p est
l'opérateur de Laplace.
| 

