1.2- Modele diphase de la machine
D'après le théorème de Blondel, deux
enroulements en quadrature suffisent pour créer un champ tournant. Donc
le champ tournant crée par un système d'enroulements
triphasées (trois bobines) équilibrées peut
également être crée par le système diphasé
(deux enroulements en quadrature) équivalent.
1.2.1- Transformation de Clarke ou de Concordia
Passage du systeme triphase fixe au systeme diphase
fixe
Les transformations de Clarke et de Concordia permettent
(l'une ou l'autre) de passer d'un repère à trois axes
équilibrés (triphasé) abc à un
repère à deux axes en quadrature (diphasé)
áâ . Ce qui est très intéressant puisque
l'objectif de la commande vectorielle est de parvenir à commander
séparément les deux grandeurs flux et couple qui
seront chacune, associée à un axe.
L'objectif de toute commande de machine étant le
transfert maximum de puissance (entre la machine et sa charge), nous
choisissons pour la suite la transformation de Concordia qui conserve la
puissance et non les amplitudes par rapport à celle de Clarke qui ne
conserve que les amplitudes et pas la puissance. Cette transformation se fait
en appliquant au système triphasé X , la matrice
T3 2 de Concordia comme suit :
1
=

2

-
-
2

2

3
2
3
0
T3 2
[
xa

T3 2
xá
1 ~ i
xb
[
xâ
xc
1 ~
~
li
soit [ xáâ ] = T3
2 [ xabc ] ; avec
(1.4)
3 1
1
2
1 ~ ~ ~ ~ ~
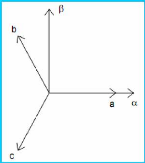
Figure 1-2 : Illustration du passage
de abc a áâ
[14]
I.2.3- Transformation de Park
Passage du repere fixe ( á
, â) au repere tournant
(d , q )
Toujours dans le but de rendre compte au mieux de la
réalité, il est nécessaire de travailler dans un
repère tournant, puisque le rotor de la machine est en mouvement.
Grâce à la transformation de Park qui n'est rien
d'autre qu'une rotation d'angle è (angle
électrique
correspondant à la position choisie pour la transformation), il est
possible de passer
du repère fixe (á
,â ) à un repère tournant
(d , q ) dit de Park, qui peut
ensuite être associé
soit au stator, rotor ou champ tournant.
La transformation se fait ainsi en appliquant au système
diphasé X , la matrice de rotation
R (è) telle que :
)
xá
x d
1
1
1
R (è

1 1
_1
xâ
xq
[
[
soit [ xdq ] = R ( è
) [ x áâ ] ; avec ~~
~ cos è sin è
~
R( )
è = (1.5)
~~ - sin cos
è è

Figure 1-3 : Illustration de la transformation
de Park (de áâ a
dq ) [12]
Le système triphasé X dans le
repère ( a , b , c ) peut
également et simplement être représenté par son
équivalent dans le repère (d , q
) de Park par application de la matrice P(è) de
Park telle que :
(1.7)
)
xa

P(è
x d
~ ~ ~
xb
[
xq
xc
[
1 ~
~
LI
soit [ x dq ] =
P(è)[ xabc ] ;
~ 2 ð 2 ð
cos ~ - ~ ~

cos ~~ ~~ ~ + ~
~ è è cos ~~
è ~~ ~
2 3 3
avec P ( è ) = ~ ~
(1.6)
3 ~ ~ - 2 ð ~ ~
~
- - è ~~ - ~ +
2 ð
sin è sin
~ ~~ sin ~~ è
~~ ~
~ 3 3 ~
Dans la suite, nous utiliserons cette transformation directe qui
rend les différentes grandeurs constantes.
( )
ù ã
t +
~ + - 2 ð
~
~~ ù ã
~~
3
t
~ + + 2 ð ~ ~~
ù ã
t ~~
3
v sa= V
v sb V
v sc= V
cos
cos
2. cos
2.
2.
L
Pour un système de tensions statoriques
vabc triphasé équilibré telle que :
La transformation est :[v dq
] = P(è)[ vabc ] et le
développement du calcul fournit :
Vsd =
V 3 cosã et Vsq = -V 3
sinã (1.8)


| 

