6. Organigramme principale de mouvement de notre
robot
La figure 4.26 représente l'organigramme de mouvement
de notre robot. Le robot utilise la logique floue qui permet le choix de
meilleure trajectoire. L'organigramme contient des deux sous-programmes
montrés dans les figures 4.27 et 4.28.
Robot marche avant
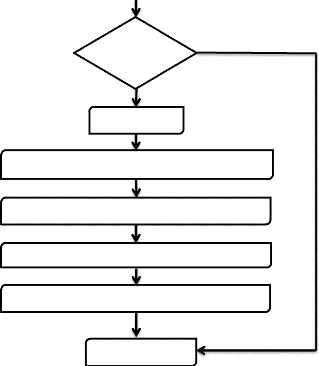
Utilisé logique flou pour évitement de
l'obstacle
Calcule des nouvelles coordonnées
Calcule le nouvel ongle de rotation
Tourner et diriger vers la cible
Arrêt robot
Test
obstacle
Vers cible
OUI
NON
Figure 4.26 : Organigramme de programme
principale
Chapitre 04
Réalisation pratique
6.1. Sous-programme détection d'obstacle
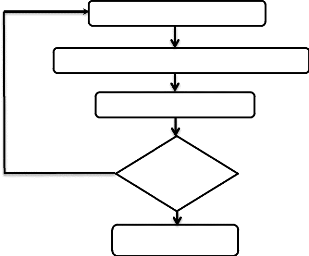
Calcule la distance à partir du capteur (chaque 3ms)
Non
Programme la distance minimale
Calcule les cordonnées actuels
Vers partie LF
Si distance <30cm
Oui
Figure 4.27 : Organigramme de détection
d'obstacle 6.2. Sous-programme évitement d'obstacle avec logique
floue
Obstacle détecté (DA)
Turner à droite 45° et calcule la distance DD
Turner à gauche 45° et calcule la distance DG
Choisit la trajectoire par les règles de logique
floue
Marcher le robot la trajectoire choisit
Continuer vers la Cible
Figure 4.28 : Organigramme d'évitement
d'obstacle avec logique flou
59
Chapitre 04
Réalisation pratique
60
| 

