I.6.
Espace de travail
I.6.1. Définition
L'espace de travail est l'ensemble des positions et /ou
orientations accessible par l'organe terminal du robot.
Le volume ou l'espace de travail d'un robot dépend
généralement de trois facteurs :
- De la géométrie du robot,
- De la longueur des segments,
- Du débattement des articulations (limité par
des butées)
Soit  une configuration articulaire donnée et soit X
l'élément de l'espace opérationnel correspondant, tel que
: une configuration articulaire donnée et soit X
l'élément de l'espace opérationnel correspondant, tel que
: 
On note Q l'ensemble des configurations
accessibles compte tenu des butées articulaires, Par conséquent,
Q sera appelé domaine articulaire.
L'image de Q par le modèle géométrique
direct f définit l'espace de travail W du robot:
 (I-21)
(I-21)
Dans le cas général, Les orientations de
l'organe terminal n'apparaissent pas dans la définition de ce volume de
travail car ce n'est pas facile de les représentées.
W est donc la projection dans l'espace des positions [FIS
04].
Comme on l'a définie précédemment, la
position de l'organe terminal dans le repère atelier est donnée
par le vecteur position P dans la matrice de transformation
FTE.
On a développé un programme qui a comme
paramètres d'entrée les limites articulaires de chaque
articulation et comme sortie toutes les configurations possibles (les
positions) de l'organe terminal, l'algorithme associé à ce
programme est : [BEN 06]
Début
Entrer (qmin et qmax)
pour chaque articulation ;
i =1
Pour q1 allant de qmin à
qmax faire
Pour q2 allant de qmin à
qmax faire
......
.......
Pour qn allant de qmin à
qmax faire
px(i)=f(q)
py(i)=f(q)
pz(i)=f(q)
i=i+1
fin pour
......
fin pour
fin pour
Sortie (Px,Py,Pz)
fin du programme
I.6.2. Application
numérique
Si on admet que chaque liaison rotoïde permet une
rotation d'un tour complet (2) et que l'origine
OE du repère outil est le point de
référence, dans l'absence des butées articulaires et sans
tenir compte les positions singulières, l'espace de travail dans ce cas
est une sphère creuse du centre O2 l'origine
du repère R2 et de rayons intérieur
et extérieur L-L6 et L+r3 (où
L=RL4+L2), Figure (I.8).
La figure (I.9), montre la
représentation de cette espace dans le cas où :

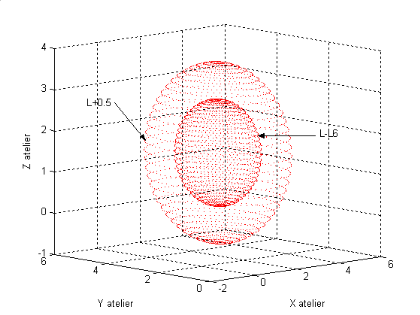
Figure I.8.
L'espace de travail du robot lorsque : 0<i<2ð,
0<r3<0.5
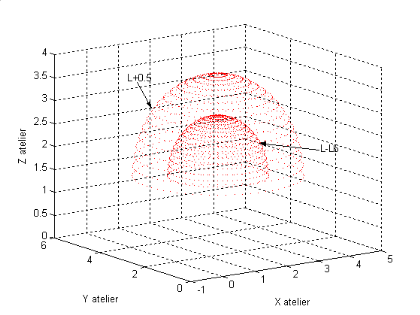
Figure I.9.
L'espace de travail du robot lorsque : 0<1,2<ð,
0<4,5 <2ð, 0<r3<0.5
| 

