àtude des différentes lois de commande pour un robot manipulateur à 6DDL comportant une liaison prismatique( Télécharger le fichier original )par Sabah CHEMAMI Université Larbi Ben Mhidi de Oum El Bouaghi Algérie - Magister 2009 |

· Application sur le robot choisi
Figure V.12. L'erreur d'orientation et de translation dans l'espace opérationnel.
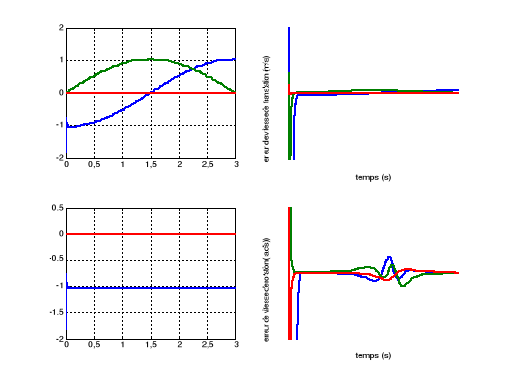
Figure V.13. L'erreur de vitesse dans l'espace opérationnel. V.3.3. Commande au voisinage des positions singulières |
|


 définit les écarts en position, et
définit les écarts en position, et  pour indiquer les écarts en orientation, de tel sorte
que :
pour indiquer les écarts en orientation, de tel sorte
que : (V-16)
(V-16) sont :
sont :
 et
et , sont représentés dans la figure
(V.12).
, sont représentés dans la figure
(V.12). , et de l'ordre de 10-3 rad pour l'erreur
d'orientation.
, et de l'ordre de 10-3 rad pour l'erreur
d'orientation.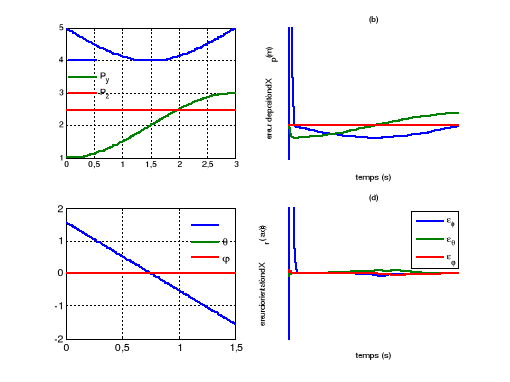
 (V-17)
(V-17)  est utilisé comme paramètre d'amortissement de l'inverse
de la matrice jacobienne. En choisissant
est utilisé comme paramètre d'amortissement de l'inverse
de la matrice jacobienne. En choisissant , nous assurons l'existence de l'inverse de la matrice jacobienne. Ceci
permet de traverser les positions singulières. Une valeur de
, nous assurons l'existence de l'inverse de la matrice jacobienne. Ceci
permet de traverser les positions singulières. Une valeur de  donne des résultats satisfaisants [AGU 07].
donne des résultats satisfaisants [AGU 07].