àtude des différentes lois de commande pour un robot manipulateur à 6DDL comportant une liaison prismatique( Télécharger le fichier original )par Sabah CHEMAMI Université Larbi Ben Mhidi de Oum El Bouaghi Algérie - Magister 2009 |

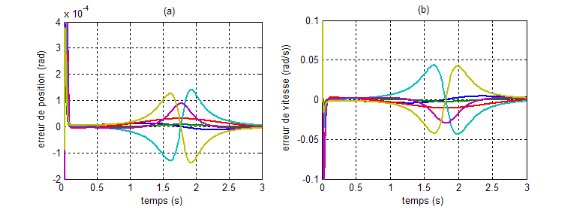
· Application sur le robot choisi Les valeurs de On considère que le robot se déplace selon la trajectoire donnée dans le chapitre III (la poursuite d'une tache de soudure). Cette trajectoire est caractérisée par les coordonnées opérationnelles de translation et de rotation présentées par les figures (V.8.(a, b)) respectivement. La figure (V.8.c, d) montre les coordonnées (positions et vitesses) articulaires correspondantes à la trajectoire désirée. La figure (V.9.a, b) représente l'évolution des erreurs au niveau des coordonnées articulaires lors du suivi de la trajectoire désirée. On remarque la bonne convergence de la loi de commande établie. Cette erreur est très faible, elle est de l'ordre de 10-4rad pour l'erreur de position et de 10-2 rad/s pour l'erreur de vitesse.
Figure V.8. Les coordonnées de la trajectoire désirée dans l'espace opérationnel (a, b) et dans l'espace articulaire(c, d)
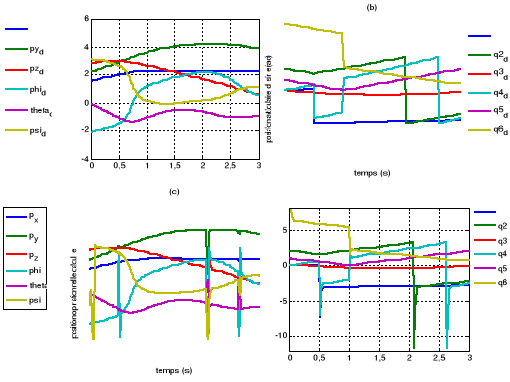
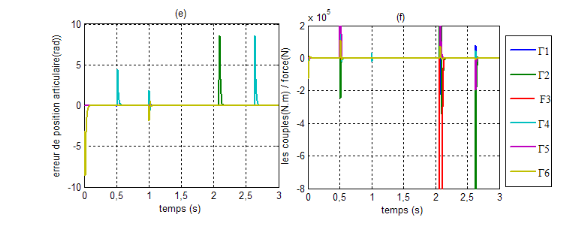
Figure V.9. L'erreur de position et l'erreur de vitesse dans l'espace articulaire Lors de la simulation, on a utilisé différentes trajectoires, et on a trouvé qu'il a des cas où le système diverge et l'erreur pour quelques articulations devient très grande. Cette divergence est due par le fait que le MGI a plusieurs solutions (8 solutions dans notre cas). On prend, comme exemple, la trajectoire donnée par la figure (V.10.a).
Figure V.10. L'erreur due au problème de la non unicité du MGI Les résultats de simulation sont montrés dans la figure (V.10). On voit, bien que, les couples atteint des valeurs très grandes quand les positions articulaires changent d'aspect. Pour remédier à ce problème on doit poser des contraintes ayant une relation avec la géométrie du robot, afin de minimiser le nombre de solutions. Ces contraintes diffèrent d'un robot à l'autre. La deuxième solution est de penser à une loi de commande qui ne passe pas par le MGI. V.3.2.2. Commande dans l'espace opérationnel avec correction dans l'espace opérationnel Le mouvement dans l'espace de tâche peut être
réalisé en modifiant notre choix de la commande de la boucle
externe Soit
où Etant donné l'équation du double
intégrateur (V-4) dans l'espace articulaire, si
le résultat est une équation du double intégrateur dans l'espace opérationnel :
Comme pour la commande dans l'espace articulaire, on peut proposer plusieurs schémas. On détaille ici le cas d'une correction PD lorsque le mouvement est complètement spécifié. On pose alors :
Avec cette loi, dans l'hypothèse d'une modélisation parfaite et d'erreurs initiales nulles, le comportement du robot est décrit par l'équation:
Figure V.11. La commande dans l'espace opérationnel avec correction dans l'espace opérationnel. |
|


 sont les mêmes de la section précédente.
sont les mêmes de la section précédente.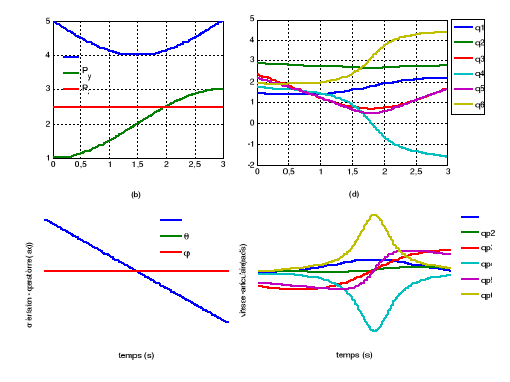
 dans l'équation (V-4), tout en laissant la commande de la
boucle intérieure inchangée (le calcul de
dans l'équation (V-4), tout en laissant la commande de la
boucle intérieure inchangée (le calcul de  ).
).  la position du terminal en utilisant n'importe quelle
représentation minimale. Puisque X est une fonction
des variables communes nous avons :
la position du terminal en utilisant n'importe quelle
représentation minimale. Puisque X est une fonction
des variables communes nous avons : (V-9)
(V-9) est la jacobienne analytique.
est la jacobienne analytique.  est choisi comme:
est choisi comme: (V-10)
(V-10)  (V-11)
(V-11) (V-12)
(V-12) (V-13) avec :
(V-13) avec :  (V-14) Le schéma bloc correspondant
est représenté par la figure (V.8), la valeur de
(V-14) Le schéma bloc correspondant
est représenté par la figure (V.8), la valeur de
 est calculée par la relation :
est calculée par la relation : (V-15)
(V-15)










 MCD
MCD