IV.4.
Application sur le robot choisi
Nous avons supposé que, en raison de symétrie,
les centres de masse , , , , , , et et  sont respectivement situés sur les supports de
Z1, Y2, Z3, Z4,
Y5 et Z6 et que les matrices sont respectivement situés sur les supports de
Z1, Y2, Z3, Z4,
Y5 et Z6 et que les matrices
 de chaque corps, sont diagonales, donc : de chaque corps, sont diagonales, donc :
 
L'effet extérieur sur l'organe terminal est : 
Les efforts extérieurs sur les autres corps du robot
sont supposés nuls.
Le logiciel Maple a été utilisé pour
développer les expressions des différents termes du modèle
dynamique par les deux méthodes.
Les résultats ainsi obtenus sont les suivants :
IV.4.1. Résultats obtenus par le formalisme de Newton
Euler
L'étape 1 : les vitesses
angulaires
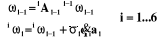

L'étape 2 : les
accélérations angulaires

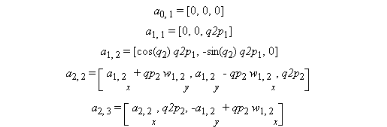

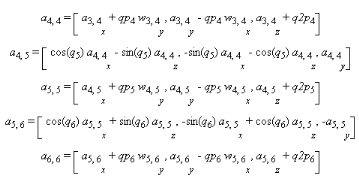
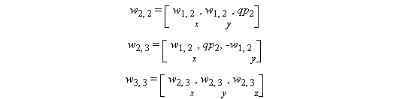
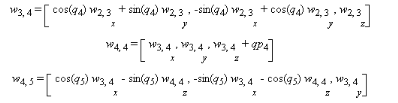
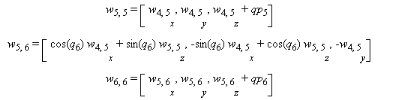
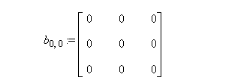
L'étape 3 : opérateurs
tensoriels

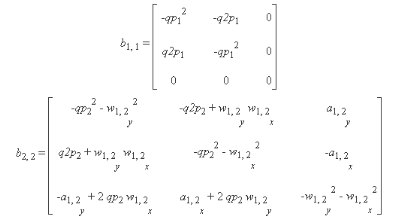
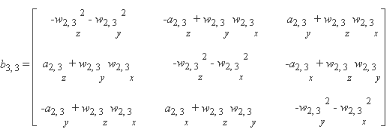
Par la même méthode, on calcule les autres 
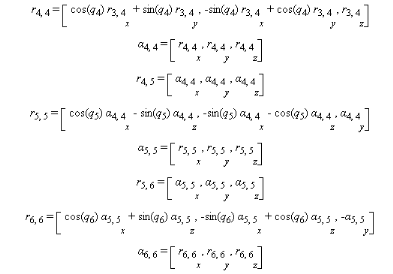
L'étape 4 : Les
accélérations linéaires :



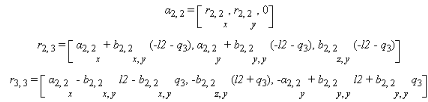

L'étape 5 : Les efforts sur les
articulations :

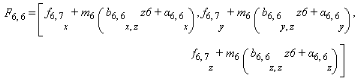






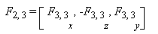




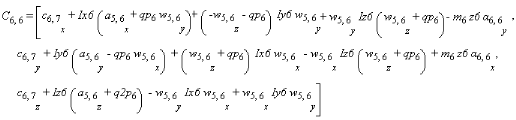
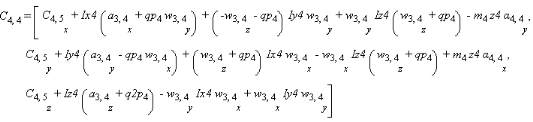
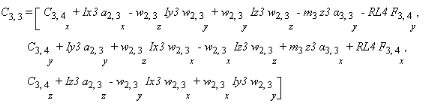
L'étape 6 : Les moments aux
niveaux des articulations :









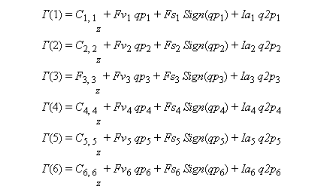
L'étape 7 : Calcul des couples
résultants pour chaque articulation
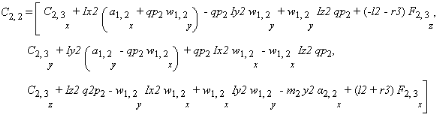
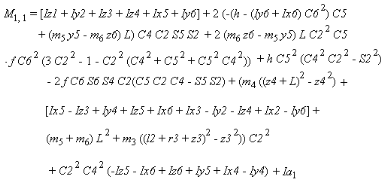
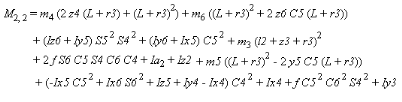
IV.4.2. Résultats obtenus
par le formalisme de Lagrange
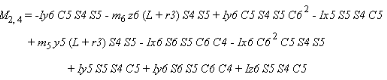
· Matrice d'inertie M:






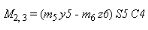





· Les éléments de la matrice
C se déduisent des expressions de la matrice
M grâce à la relation (IV-21).
· Le vecteur Q :
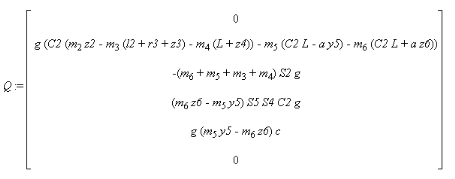
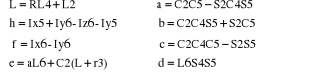
avec :

| 

