CHAPITRE 3 :
.2)emarche de resolution du problem~
Introduction :
Le but de ce chapitre est de presenter la methode adoptee
pour la resolution du probleme, mais avant cela il semble interessant de
presenter :
o les avantages et inconvenients qu'offrent la logique
cablee et la logique programmee o une methode d'etude des
systemes sequentiels.

La logique programmée est à définir par
opposition à la logique câblée, qu'elle soit combinatoire
ou séquentielle.
I. Partie commande
1. La logique cablee
L'automatisme est obtenu en reliant entre eux les
différents constituants de base ou fonctions logiques par câblage.
La logique câblée correspond à un traitement
parallèle de l'information. Plusieurs constituants peuvent être
sollicités simultanément. [8]
Elle est étudiée et réalisée une
fois pour toutes sur un schéma donné : Les fonctions sont
réalisées par voie matérielle. Elle exige un
grand nombre de composants et rend les montages encombrants et chers. Enfin,
elle n'offre guerre de souplesse : la durée des études pour
réaliser un montage donné (et donc pour le modifier le cas
échéant) est longue.
- les applications nouvelles
Le gain : le micropresseur est d'une
grande souplesse, car les fonctions sont réalisées par
voie logicielle, et sont modifiables à
tout moment en un temps réduit. De
plus, le nombre de composants est réduit à sa plus simple
expression.
Les limites :
- Limite inférieure : si la fonction
à réaliser est trop simple, il est plus économique de
conserver une logique câblée.
- Limite supérieure : si le nombre
d'unités à réaliser est très important, il est plus
économique de la fabriquer en circuits intégrés à
la demande ou en logique câblée pour des fonctions simples.
2. Logique programmee
Elle correspond à une démarche séquentielle,
seule une opération élémentaire est exécutée
à la fois, c'est un traitement série. Le schéma
électrique est transcrit en une suite d'instruction qui constitue le
programme. En cas de modification des équations avec les mêmes
accessoires, l'installation ne comporte aucune modification de câblage
seul le jeu d'instructions est modifié. [8]
Si un circuit est réalisé en logique
programmée, il utilisera moins de composants puisque ceux-ci
réalisent directement les fonctions logiques désirées. Un
circuit ayant moins de composants sera habituellement moins coûteux
à concevoir, réaliser et distribuer. La réduction du
nombre de composants électroniques tend aussi à augmenter la
fiabilité des circuits et à réduire la consommation
énergétique.

L'automate simplifie grandement le schéma de la logique
câblée prenant en compte tout ce qui est extérieur à
la programmation, comme les voyants. Il sert pour se substituer à une
partir commande complexe qu'on programmera dans un automate.
Automatiser avec les automates pour :
- réduire les coûts d'ingénierie
- réduire les coûts de maintenance
Le choix du type d'une logique pour résoudre un
problème, dépend de plusieurs critères :
Complexité ; coût ; évolutivité ;
rapidité.
3. Logique cablee v.s programmee
Logique câblée
n Inconvénients
o Volume du contrôleur proportionnel à la
complexité du problème
o Des modifications de la commande impliquent des modifications
de câblage
n Avantages
o Vitesse car fonctionnement simultané des
opérateurs [7]
Logique programmée
n Avantages
o Banalisation du matériel : même matériel
quel que soit la fonction logique à réaliser
o Facilité de modification de la loi de contrôle :
il suffit de modifier le programme. Simplification de la maintenance !
o Faible liaison entre le volume matériel et la
complexité du problème (effet simplement
sur les entrées/sorties et taille mémoire)
n Inconvénients
o Vitesse inversement proportionnelle à la
complexité du problème.
Ceci peut être une limitation pour les processus
électromécaniques rapides [7]
II. Mod~lisation des systemes sequentiels
La modélisation d'un système
séquentiel est la traduction de son cahier de charge (suite de phrase
décrivant le fonctionnement désiré du système) en
un formalisme qui ne permet aucune erreur d'interprétation. [9]
Comme modèle nous pouvons citer : le chronogramme
(diagramme des temps), le graphe de fluence, les tableaux d'état, le
graphe d'état, le graphe d'événement, le GRAFCET, les
Réseaux de Pétri.

Nous nous intéresserons plus particulièrement au
Grafcet car il permet de représenter le fonctionnement de la partie
commande des systèmes automatisés de production.
III. Une méthode d'étude des systemes
séquentiels : le GRAFC ET
L'AFCET (Association
Française pour la Cybernétique
Economique et Technique) et l'ADEPA
(Agence nationale pour le DEveloppement de la
Production Automatisée) ont mis au
point et développé une représentation graphique qui
traduit, sans ambiguïté, l'évolution du cycle d'un
automatisme séquentiel.
Ce diagramme fonctionnel: le GRAFCET (Graphe
Fonctionnel de Commande,
Etapes Transitions) permet de décrire
les comportements attendus de l'automatisme en imposant une démarche
rigoureuse, évitant ainsi les incohérences dans le
fonctionnement. [5]
1. De'initions
Le Grafcet est défini par un ensemble constitué
:
- d'éléments graphiques de base
comprenant : les étapes, les transitions, les liaisons
orientées.
- d'une interprétation traduisant le
comportement de la partie commande vis-à-vis de ses entrées et de
ses sorties, et caractérisée par les réceptivités
associées aux transitions et les actions associées aux
étapes.
- de 5 règles d'évolution
définissant formellement le comportement dynamique de la partie
commande. (voir annexe 1)
- d'hypothèses sur les durées
relatives aux évolutions.
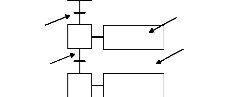
Transition
Liaison
2
1
Fin de perçage
Déplacer
Percer
Action
Récéptivité
associée à la transistion
Figure 7: Grafcet
|
Rédigé par TCHIEGANG MBITCHA Alain Bertrand
|
30
|

Tableau 1: Parties du Grafcet [5]
|
Etape:
|
une étape représente une situation stable de la
PC
Une étape est soit active soit inactive. On peut associer
à chaque étape i une variable Xi image de son activité.
ex: Etape 2 active 4 X2 = 1 Etape 2 inactive
4 X2 = 0
|
|
Etape initiale:
|
étape active au début du fonctionnement.
Elle se représente par un double carré.
|
|
Liaisons orientées:
|
Elles relient les étapes aux transitions et les
transitions aux étapes. Le sens général d'évolution
est du haut vers le bas. Dans le cas contraire, des flèches doivent
être employées
|
|
Transitions :
|
une transition indique une possibilité d'évolution
d'activité entre deux ou plusieurs étapes. Cette évolution
s'accomplit par le franchissement de la transition.
|
|
Réceptivité :
|
La réceptivité associée à une
transition est une fonction logique : - des entrées (capteurs, commande
opérateur)
- des activités des étapes (Ex : X1 pour
étape 1 active.)
- des variables auxiliaires (Ex : [C1=10] pour un test sur
compteur C1)
|
|
Action:
|
L'action indique, dans un rectangle, comment agir sur la variable
de sortie, soit par assignation (action continue), soit par affectation (action
mémorisée)
|
2. Construction des grafcets
La construction des grafcets peut se faire avec ou sans
méthode. [13]
1. Sans méthode = « A l'intuition
»
Envisageable pour des automatismes simples, à faible taux
de parallélisme.
2. Avec méthode = approche basée sur les
fonctions
Il exprime les fonctions à assurer auxquelles sont
associées des contraintes.
Avec méthode = approche basée sur une
analyse fonctionnelle
> Conception mécanique
· La décomposition fonctionnelle conduit à
choisir des constituants physiques (un vérin, un capteur inductif, une
butée, un convoyeur ...)
· Les constituants sont « localisés » dans
l'espace
> Automatisation
· La décomposition fonctionnelle conduit à
définir des actions (actionner un vérin, mise en route d'un
moteur, déclenchement d'une alarme ...)
· Les actions sont « synchronisées » dans
le temps (=> grafcet)

3. Les differents points de vue du GRAFCET
Il existe 3 représentations du fonctionnement d'un
système par le GRAFCET :
- le GRAFCET point de vue système qui représente
le fonctionnement du système tel que le voit quelqu'un
d'extérieur à celui-ci.
- le GRAFCET point de vue Partie Opérative qui
représente le fonctionnement du système tel que le voit quelqu'un
connaissant la PO de celui-ci.
- le GRAFCET point de vue Partie Commande qui représente
le fonctionnement du système tel que le voit quelqu'un connaissant tout
le système.
VI. Methodologie
La méthode adoptée pour la résolution du
problème est la suivante :
=> Une analyse du système automatisé existant
=> Une analyse de ces différentes
fonctionnalités qui sera suivie de la modélisation du
système
=> La programmation des séquences de fonctionnement
qui s'articulera comme suit :
o Le choix de l'automate
o Sa configuration matérielle et logicielle
o La mise en oeuvre des séquences de fonctionnement
o Le câblage des entrées / sorties
=> Une simulation
=> Le choix des appareillages électriques
=> Une analyse financière du projet
Conclusion :
La logique programmée a de nombreux avantages par rapport
à la logique câblée. Toutefois le choix du type d'une
logique pour la résolution d'un problème dépend de
plusieurs critères.
Chapitre
4
| 

