CHAPITRE 2 :
goneralites sur l~automatique

I. Definitions
L'automatique est à la fois une science et une technique
qui étudie les méthodes scientifiques et les moyens techniques
pour la conception et la réalisation des systèmes
automatisés.
L'automatisation est l'exécution automatique de
tâches domestiques, industrielles, administratives ou scientifiques sans
intervention humaine. [5]
Des systèmes automatisés permettent :
· De réaliser des opérations trop complexes
ou dangereuses et ne pouvant être confiées à l'homme
(alunissage d'un engin spatial, maintenance et contrôle dans les
centrales nucléaires)
· De substituer l'homme dans les opérations
répétitives ou pénibles (électroménager,
boîte de vitesses automatique, embrayage piloté)
· D'accroître la précision (applications
militaires, gestion électronique de moteur thermique, pilote
automatique)
· D'accroître la rentabilité et la
productivité par la diminution de la main-d'oeuvre (chaîne de
montage, atelier automatisé) [5]
II. Differents types de systemes automatises
· Systèmes linéaires, continus et
invariants
Les grandeurs d'entrée et de sortie évoluent de
manière continue en fonction du temps.
· Systèmes combinatoires
Les grandeurs d'entrée et de sortie sont des grandeurs
binaires. La commande est appelée TOR (Tout Ou Rien). Les grandeurs de
sortie s'expriment comme une combinaison des grandeurs d'entrée.
· Systèmes séquentiels
Les grandeurs d'entrée et de sortie sont des grandeurs
binaires. Les grandeurs de sortie ne peuvent pas s'exprimer comme une
combinaison des grandeurs d'entrée. En effet pour un même
état des entrées, on n'a pas forcément les même
sorties. Une notion d'état du système, de mémoire, se
rajoute. [5]
Les systèmes logiques sont des
systèmes pour lesquels toutes les variables
d'état (entrées ou sorties) peuvent être
représentées par des variables du type logique (signal
binaire).

III. Etude logique et l'etude dynamique des
systemes
L'étude logique est
complémentaire de l'étude dynamique des
systèmes linéaires ou asservis. Un système
automatisé est constitué de plusieurs chaînes
d'actions. [16]
1. L'etude dynamique
L'étude dynamique des asservissements
consiste à étudier une seule chaîne
d'action afin d'optimiser les différents éléments
de cette chaîne pour qu'elle réponde au cahier de charges.
Exemple d'un asservissement en vitesse d'un moteur
électrique :
Il s'agit d'étudier l'état transitoire entre
l'arrêt et le régime permanent
2. L'etude logique
L'étude logique consiste à
étudier et décrire l'évolution de l'état du
système dans sa globalité, il s'agit de tenir compte de
l'état de toutes les chaînes d'actions en
même temps. [16]
Dans ce cas on considère que l'état du
système ne sera décrit que par des variables binaires :
C'est cette étude (étude logique) que nous
mènerons tout au long de ce rapport.
Exemple : pour un moteur électrique,
On ne tiendra pas compte du régime transitoire du moteur.
On considèrera que le `'problème» a été
réglé par l'étude de la commande.
IV. Systeme automatise de production (S.A.P)
Un système automatisé est un ensemble
d'éléments en interaction, et organisés dans un but
précis : agir sur une matière d'oeuvre afin de
lui donner une valeur ajoutée. [5]
1. Structure d'un systeme automatise :
Tout système automatisé peut se décomposer
selon le schéma ci-après :
|
Rédigé par TCHIEGANG MBITCHA Alain Bertrand
|
21
|
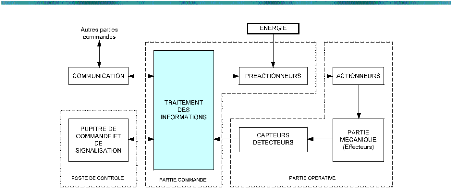
Figure 3: Structure d'un système automatisé
[5]
o Partie opérative : Elle agit sur la
matière d'oeuvre afin de lui donner sa valeur ajoutée.
o Partie commande : Coordonnant la succession
des actions sur la partie opérative avec la finalité d'obtenir
cette valeur ajoutée.
o Poste de contrôle : Composé des
pupitres de commande et de signalisation, il permet à
l'opérateur de commander le système (marche, arrêt,
départ cycle ...). Il permet également de visualiser les
différents états du système à l'aide de voyants.
V. Partie Operative
Le déplacement d'un élément de machine
outil, de mécanisme ou d'appareillage, actionné
électriquement, est du à l'un des organes moteurs suivants :
moteur électrique, vérin électro-hydraulique ou
électro-pneumatique. [2]
1. Machines electriques (Moteurs)
Une machine électrique est un
dispositif électromécanique permettant la conversion
d'énergie électrique en énergie
mécanique. Les machines électriques produisant une
énergie électrique à partir d'une énergie
mécanique sont appelées dynamos,
alternateurs ou générateurs
suivant la technologie utilisée. Les machines électriques
produisant une énergie mécanique à partir d'une
énergie électrique sont appelées des
moteurs. [6]
Les machines tournantes
Les machines tournantes sont constituées de deux parties
principales. Le stator est la partie fixe du système.
Il entoure la partie tournante, appelée rotor. On
distingue :

Les machines à courant continu
La machine à courant continu est une machine
électrique tournante qui fonctionne, comme son nom l'indique, à
partir de tensions et de courants continus.
Machines à courant alternatif
Ces moteurs alternatifs se déclinent en deux types :
· Les moteurs asynchrones
· Les moteurs synchrones : souvent utilisé comme
génératrice. Comme le nom l'indique, la vitesse
de rotation de ces machines est toujours proportionnelle à
la fréquence des courants qui les traversent. [6]
Demarrage des moteurs asyn chrones
Lors de la mise sous tension d'un moteur asynchrone, celui-ci
provoque un fort appel de courant qui peut provoquer des chutes de tension
importantes dans une installation électrique. Pour ces raisons en
autres, il faut parfois effectuer un démarrage différent du
démarrage direct. Il est donc logique de limiter le courant pendant le
démarrage à une valeur acceptable. [5]
Outre le démarrage direct, nous pouvons citer le
démarrage étoile- triangle
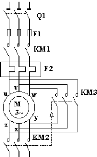
Figure 4: Démarrage
étoile-triangle
2. Les Verins
Ils transforment l'énergie d'un fluide sous pression en
énergie mécanique (mouvement avec effort). Ils peuvent soulever,
pousser, tirer, serrer, tourner, bloquer, percuter, ...
Leur classification tient compte de la nature du
fluide, pneumatique ou hydraulique, et du
mode d'action de la tige : simple effet (air comprimé
admis sur une seule face du piston), double effet (air
comprimé admis sur les deux faces du piston)... [5]

|
Figure 6:Vérin simple effet classique rappel par
ressort
|
Figure 5:Vérin double effet
|
VI. Les automates programmables industriels
1. Definition
L'Automate Programmable Industriel (API) est un appareil
électronique programmable, adapté à l'environnement
industriel, qui réalise des fonctions d'automatisme pour assurer la
commande de préactionneurs à partir d'informations logiques,
analogiques ou numériques. [5]
Les API sont spécialement conçus pour traiter,
par un programme, des problèmes de logique séquentielle (ou
combinatoire) afin de remplacer les commandes d'automatismes en logique
câblée réalisée avec des circuits logiques ou des
relais.
2. Avantages
- emploi facile par des personnes non qualifiés en
informatique, grâce à des langages de programmation de type
langage à relais, équations booléennes ou GRAFCET.
- Conçus pour fonctionner en milieu industriel, afin de
remplacer les armoires à relais.
3. Nature des informations traitees par l'automate
:
Les informations peuvent être de type :
- Tout ou rien (T.O.R.) : l'information ne peut
prendre que deux états (vrai/faux, 0 ou 1 ...).
- Analogique : l'information est continue et
peut prendre une valeur comprise dans une plage bien
déterminée.
- Numérique : l'information est contenue
dans des mots codés sous forme binaire ou bien hexadécimale.
4. Architecture des automates Aspect exterieur
:
Les automates peuvent être de type compact
ou modulaire.
De type compact, Il intègre le processeur,
l'alimentation, les entrées et les sorties. Ces automates, de
fonctionnement simple, sont généralement destinés à
la commande de petits automatismes.
Généralités sur
l'automatique

De type modulaire, le processeur, l'alimentation et les
interfaces d'entrées / sorties résident dans des unités
séparées (modules) et sont fixées sur un
ou plusieurs racks contenant le "fond de panier" (bus plus
connecteurs).
Ces automates sont intégrés dans les automatismes
complexes où puissance, capacité de traitement et
flexibilité sont nécessaires.
Structure interne :
Module d'alimentation : il assure la
distribution d'énergie aux différents modules.
Unité centrale : à base de
microprocesseur, elle réalise toutes les fonctions logiques,
arithmétiques et de traitement numérique (transfert, comptage,
temporisation ...).
Le bus interne : il permet la communication de
l'ensemble des blocs de l'automate et des éventuelles extensions.
Mémoires : Elles permettent de stocker le
système d'exploitation (ROM ou PROM), le programme (EEPROM) et les
données système lors du fonctionnement (RAM).
Interfaces d'entrées / sorties :
· Interface d'entrée : elle permet
de recevoir les informations du S.A.P. ou du pupitre et de mettre en forme
(filtrage, ...) ce signal tout en l'isolant électriquement
(optocouplage).
· Interface de sortie : elle permet de
commander les divers préactionneurs et éléments de
signalisation du S.A.P. tout en assurant l'isolement électrique [5]
5. Criteres de choix d'un automate
Un automate utilisant des langages de programmation de type
Grafcet est préférable pour assurer les mises au point et
dépannages dans les meilleures conditions.
La possession d'un logiciel de programmation (PL7 Junior/Pro...)
est aussi source d'économies (achat du logiciel et formation du
personnel). Des outils permettant une simulation des programmes sont
également souhaitables. [5]
Ensuite les besoins doivent être quantifiés.
m Nombre d'entrées/sorties : le nombre
de cartes peut avoir une incidence sur le nombre de racks dès que le
nombre d'entrées/sorties nécessaires devient
élevé.
m Type de processeur : la taille
mémoire, la vitesse de traitement et les fonctions spéciales
offertes par le processeur permettront le choix dans la gamme souvent
très étendue.

0 Fonctions ou modules spéciaux :
certaines cartes (commandes d'axe, pesage...) permettront de
`'soulager» le processeur et devront offrir les
caractéristiques souhaitées (résolution,...)
0 Fonctions de communication : l'automate doit
pouvoir communiquer avec les autres systèmes
de commande (API, supervision...) et offrir des
possibilités de communication avec des standards
normalisés (Profibus...)
6. Langages de programmation pour API
La norme IEC 1131-3 définit entre autres choses, cinq
langages qui peuvent être utilisés pour la programmation
d'applications d'automatisme. [10]
Les cinq langages sont :




SFC (« sequential function char ») :
issu du langage GRAFCET, ce langage, de haut niveau, permet la programmation
aisée de tous les procédés séquentiels ;
FBD (« function block diagram », ou
schéma par blocs) : ce langage permet de programmer graphiquement
à l'aide de blocs, représentant des variables, des
opérateurs ou des fonctions. Il permet de manipuler tous les types de
variables ;
LD (« ladder diagram », ou
schéma à relais) : ce langage graphique est essentiellement
dédié à la programmation d'équations
booléennes (true/false) ;
ST (« structured text » ou texte
structuré) : ce langage est un langage textuel de haut niveau,
particulièrement adapté à la programmation de fonctions
arithmétiques complexes, manipulations de tableaux, gestion de
messages...

Chapitre
3
| 

