2.6.1.2. Estimation de la distance d'atterrissage (Corke,
2003)
De même que le décollage, l'atterrissage se
déroule en quatre phases distinctes à savoir :
- L'approche ;
- La transition ;
- La phase de roue libre ;
- Le freinage.
La figure ci-après présente une illustration de
chacune de ces phases d'atterrissage.
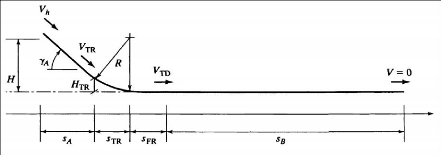
Figure 2.8 : Schéma d'illustration des phases
d'atterrissage (Corke, 2003)
· Distance pendant la descente
La descente se fait à vitesse constante avec moteur
éteint (poussée est nulle) de la hauteur d'obstacle de 50 pieds
jusqu'à la hauteur de transition HTR. Pour les avions de
transport, la valeur absolue de l'angle de descente n'est pas supérieure
à 3°.
57
(2.81)
· Distance pendant la transition
Durant la transition, l'avion vole le long d'un arc de cercle
avec un rayon de RTR. Pour un avion commercial, la vitesse pendant la
transition est :
(2.82)
La distance parcourue pendant la transition est donnée
par la relation ci-après :
(2.83)
· Distance de roue libre (Corke, 2003)
Pendant la phase de roue libre à l'atterrissage,
l'avion maintient une vitesse constante de VTD. Par convention, la
durée de la rotation en roue libre pour un avion de ligne est de 3
secondes., la distance parcourue au sol pendant cette manoeuvre est :
[ft] (2.84)
Où :
[ft/s] est la vitesse lorsque l'avion touche le sol.
· Distance de freinage (Corke, 2003)
La distance de freinage pendant l'atterrissage s'obtient par la
même démarche que la distance
de roulage ( ) au décollage. Durant cette phase, le
pilote applique les freins jusqu'à l'arrêt
de l'avion et la distance parcourue se calcul à l'aide
l'expression ci-après :
2 2
- 1 dV
0 1 ? f V
2 TD
S = = ? +
? 2 ln 1
B g f f V
2 TD
V + 2 gf
1 2 2 ? f 1
Où et sont des coefficients adimensionnels qui se
calculent comme suit :
W
(2.89)
58
(2.86)
Et,
(2.87)
Si les moteurs sont équipés d'inverseurs de
poussée , alors la poussée inverse est telle que :
est le coefficient de friction en roulement de la piste à
l'atterrissage.
La distance totale d'atterrissage est la somme de chacune des
distances des quatre phases. En plus de cela, la FAR-25 recommande de majorer
la distance totale d'atterrissage d'un facteur de 1,667, pour prendre en compte
les différences entre les pilotes (Raymer, 2006).
(2.88)
2.6.2. Performance en montée et en descente
Pendant la montée ou pendant la descente, les
paramètres les plus importants sont : le taux de montée
(respectivement de descente), la vitesse et l'angle de montée
(respectivement de descente).
2.6.2.1. Performance en montée
Pour un aéronef, le taux de montée n'est autre
que la composante verticale de la vitesse ascensionnelle de l'appareil. Ainsi,
pour un angle de montée ?climb, le taux de montée est
déterminé comme suit (Raymer, 2006) :
? - ?
T D
RC = V sin ?
V
climb = ? ?
? ?
59
Sachant que :
et
L'expression du taux de montée devient :
=
W S T
3 P C ? W ? ?
D 0, bwb ? ?
(2.90)
La vitesse à laquelle le taux de montée est
maximal est donnée par la relation suivante (Raymer, 2006) :
2 1
r ?
1 + ? ? + 12 C k ?
D 0, bwb
W ?
Vmax
climb
RD = V sin Y =
sin Y
|
|
|
|
T
W 2cosYdes
des des des
S PCL
|
(2.91)
|
|
|
|
|
|
|
| 

