CHAPITRE II
l'Analyse Vibratoire, Captures et
Identification des Défauts
II.1. Chapitre II l'Analyse Vibratoire, Captures et
Identification des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 28
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
Introduction
Dans ce chapitre nous aborderons à l'analyse
vibratoire des machines électriques pour éliminer les causes de
vibrations ou bien de développer la robustesse de ces machines. D'autre
part, il est bien connu que la correcte maintenance réside dans un bon
diagnostic, donc nous allons discuter les différents capteurs de
vibrations qui nous aider d'obtenu bien estimation l'état de la machine
et découvre l'étendue des dommages au moteur.
II.2. Analyse vibratoire
l'Analyse vibratoire était la boule de cristal de la
maintenance dans laquelle un « initié » pourrait identifier
tous les futurs dysfonctionnements d'une machine, cela se saurait et les
unités de production se disputeraient à prix d'or les faveurs des
meilleurs « médiums ». Néanmoins, cette technique,
extrêmement puissante lorsqu'elle est utilisée avec des moyens
appropriés à chaque problème, en fonction de sa
complexité et de son enjeu économique, est un outil devenu
aujourd'hui indispensable à tout service Maintenance pour assurer la
surveillance efficace de machines dont les pannes ou les marches en
dégradé présentent un risque majeur pour la
sécurité du personnel, la production ou la qualité du
produit fini.[29]
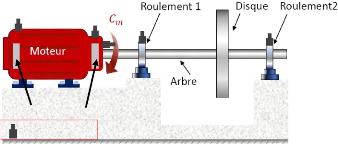
Une machine se compose d'un ensemble de mécanismes et
d'organes combinés destinés à transformer une
énergie ou à transmettre un mouvement. Ces mécanismes,
mobiles entre eux, ne peuvent fonctionner sans jeux, contraintes, efforts
dynamiques et chocs dont les effets se manifestent principalement sous forme de
vibrations et de bruits. Tout changement dans l'importance de ces jeux, de ces
contraintes, efforts ou chocs, se traduit immanquablement par une modification
de l'intensité ou des fréquences de ces vibrations. Or, cette
modification de comportement vibratoire constitue souvent la première
manifestation physique d'une anomalie affectant la machine, cause potentielle
à terme de dégradations, voire de pannes.
Cette particularité fait de l'analyse des vibrations un
outil d'investigation indispensable à l'assise d'une maintenance
moderne. Cet outil occupe une place privilégiée parmi les
techniques de surveillance. Il permet, par la génération
d'alarmes plus ou moins précoces, de signaler la présence d'un
dysfonctionnement, de dépister l'apparition d'une dégradation et
d'en suivre la progression, d'éviter une casse ou une dérive de
la qualité du produit fabriqué, tout en permettant une action
corrective programmée à bon escient au regard des
impératifs de production.
La surveillance vibratoire des machines tournantes a sans
doute toujours existé avec des moyens empiriques tels le toucher de la
main ou l'utilisation de la pièce de monnaie dont l'équilibre sur
la tranche garantissait le bon fonctionnement de la machine ou encore avec
des
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 29
moyens un peu plus techniques tels le vibromètre
à lamelles qui permettaient, dans les cas simples, d'identifier la
fréquence de la vibration d'amplitude prépondérante.
Aujourd'hui, la nécessité de communiquer, non
plus avec des impressions ou des sensations subjectives, mais avec des
données objectives, reproductibles et fiables, a rendu indispensable de
quantifier globalement les vibrations d'une machine par une mesure d'amplitude.
Le besoin est ensuite rapidement apparu de fixer des seuils à ces
valeurs et de connaître les amplitudes et les fréquences des
composantes prépondérantes. Enfin, la possibilité de
relier les fréquences de chaque composante vibratoire aux
différentes forces dynamiques engendrées par le fonctionnement
normal ou anormal de la machine et d'en interpréter les
évolutions est devenue une réalité avec
l'intégration à faible coût, dans les appareils de mesures
de vibrations, de convertisseurs analogiques numériques et de
coprocesseurs dédiés aux calculs de transformées de
Fourier. [29]
Source de vibration
Dispositif de mesure de vibration
Carte d'acquisition
Traitement de signal
Affichage
Fig.II.1. Composants de l'architecture de système
de détection de défaut. [30] II.2.1.
Définition d'une vibration (selon la norme NFE 90-001)
Une vibration est une variation avec le temps d'une grandeur
caractéristique du mouvement ou de la position d'un système
mécanique lorsque la grandeur est alternativement plus grande et plus
petite qu'une certaine valeur moyenne ou de référence.
Les phénomènes vibratoires sont des
phénomènes périodiques ou apériodiques plus ou
moins complexes.
II.2.2. Vibration Caractéristiques
Une vibration se caractérise principalement par
sa fréquence, son amplitude et sa phase.
a)
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 30
Amplitude : Aide à détecter la
sévérité du problème ou du défaut.
b) Fréquence : Aide à indiquer la
cause du défaut.
c) Phase : Aide à déterminer la
cause du défaut.
On appelle amplitude d'une onde vibratoire la valeur de ses
écarts par rapport au point d'équilibre. On peut définir
:
? L'amplitude maximale par rapport au point
d'équilibre appelée également amplitude
crête (Ac).
? L'amplitude double, aussi appelée
amplitude crête à crête (Acc) ou «
peak to peak » en anglais.
? L'amplitude efficace
(Aeff), aussi appelée RMS
(Root Mean Square en anglais).
L'amplitude des vibrations peut être mesurée en
termes de déplacement, de vitesse et d'accélération. Le
déplacement est mesuré de crête à crête et
généralement en mils ou microns. La vitesse peut être
mesurée en crête ou en valeur efficace et
généralement en pouces (inch)/seconde ou en mm/seconde.
L'accélération est exprimée en crête et
généralement mesurée en g. La phase indique comment une
machine se déplace par rapport à une référence de
sa partie. La relation entre le mouvement d'une partie d'une machine et une
référence - par exemple la position des deux
extrémités de l'arbre lorsqu'il tourne.[31]
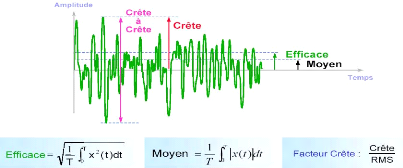
Fig.II.2. Caractéristiques d'un signal
vibratoire. [31]
1 Hz = 1 cycle par seconde, Exemple pour un moteur tournant
à 1500 tr/mn, la fréquence de rotation est égale à
1500/60=25 Hz
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 31
Sur les machines tournantes industrielles, on utilise souvent le
tour par minute pour exprimer une vitesse de rotation, parfois noté
CPM (cycle par minute) ou RPM (rotation par
minute).
II.2.3. Intérêt du mesurage des
vibrations
Le but est évidemment de préserver et prolonger la
durée de vie des machines stratégiques.
Pratiquement ces dernières peuvent être
affectées par les facteurs suivants :
? Les machines elles-mêmes ne sont pas parfaites :
- Finition insuffisante,
- Jeux de fonctionnement trop importants,
- Mauvais équilibrages qui provoquent des balourds.
? Un mauvais montage :
- Mauvais alignements fréquents,
- Des serrages mal faits, des boulons déforment les
pièces,
- Les fondations ne sont pas suffisamment résistantes.
? En marche :
- Les variations de température provoquent des
dilatations,
- Les charges conduisent à des torsions, des flexions,
- L'usure accroît les jeux.
II.2.4. Techniques de mesurage
Trois paramètres (reliés entre eux) sont
caractéristiques des vibrations : II.2.4.1. Le
déplacement
Le Déplacement quantifie l'amplitude maximale du signal
vibratoire. Historiquement, c'est la grandeur qui fut utilisée en
premier car cette mesure était la seule possible avec les moyens de
l'époque. Le Déplacement est inversement proportionnel au
carré de la fréquence : Plus la
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 32
fréquence augmente, plus le Déplacement diminue
: Son utilisation est réservée aux très basses
fréquences : F < 100 Hz
Un signal vibratoire sinusoïdal
généré par un balourd simple s'exprimera par la relation
:
d(t) = D.sin (2. F. t + (p) (II.2)
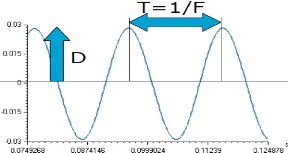
Fig.II.3. Signal sinusoïdal de déplacement
[32] L'unité utilisée pour la mesure des
déplacements est le micron (um). II.2.4.2. La
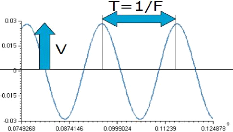
vitesse
La Vitesse d'un mobile correspond à la variation de sa
position par unité de temps. Mathématiquement, la vitesse
s'exprime comme la dérivée du déplacement par rapport au
temps :
d[d(t)]
d
La Vitesse est inversement proportionnelle à la
fréquence : Plus la fréquence augmente, plus la Vitesse diminue :
Son utilisation est réservée aux basses fréquences F <
1000 Hz.
Un signal vibratoire sinusoïdal généré
par un balourd simple s'exprimera par la relation :
(II.4)
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 33
Fig.II.4. Signal sinusoïdal de vitesse [32]
L'unité utilisée est le mm/s.
II.2.4.3. L'accélération
L'Accélération d'un mobile correspond à
la variation de sa vitesse par unité de temps. Mathématiquement,
l'accélération s'exprime comme la dérivée de la
vitesse par rapport au temps.
d[ v(t)]
d
L'Accélération représentative des forces
dynamiques, ne dépend pas de la fréquence : C'est le
paramètre privilégié en analyse vibratoire sur un large
domaine de fréquences.
0 = F = 20000 Hz
Un signal vibratoire sinusoïdal
généré par un balourd simple s'exprimera par la relation
:
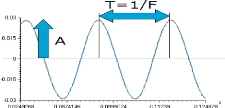
Fig.II.5. Signal sinusoïdal
d'accélération [32] L'unité utilisée est
le g , 1g = 9.80665 m/s2.
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 34
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
II.2.4.4. Relations entre les grandeurs
Il existe une relation mathématique entre les grandeurs
comme suit :
D'au :
??
II.3. Captures de vibrations
La première étape conduisant à
l'obtention d'une lecture de vibrations consiste à convertir la
vibration mécanique produite par une machine en un signal
électrique équivalent. Cette opération est
réalisée au moyen des capteurs de vibrations. On retrouve parmi
les capteurs les plus couramment utilisés le capteur de
déplacement, le capteur de vitesse et
l'accéléromètre.
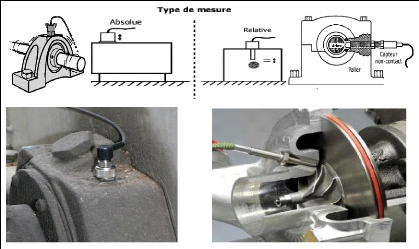
II.3.1. Capteur de déplacement
Le capteur de déplacement est un instrument qui produit
un signal électrique directement proportionnel au déplacement
relatif de la vibration d'un arbre ou d'un rotor. Il est monté en
permanence à l'intérieur du palier. Il s'agit d'un capteur
"non-contact", c'est-à-dire que le capteur n'entre jamais en contact
avec la surface en vibration. Les capteurs de vibrations se divisent en deux
catégories caractérisées par le type de mesure à
effectuer, mesure de vibration absolue ou bien d'une mesure de vibration
relative. Dans le premier cas, le capteur de vibrations est monté en un
point quelconque sur la machine (figure II.6 ).[33]
Accéléromètre
Capteur de déplacement
Fig.II.6. Capteurs de vibrations et les types de
mesures. [33][34][35][36]
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 35
La mesure effectuée tient alors compte de tous les
phénomènes vibratoires transmis par la structure de la machine au
point de montage du capteur. Dans le deuxième cas, seule la vibration
produite par le mouvement de l'arbre ou du rotor par rapport à une
position de référence est mesurée. (figure II.7)
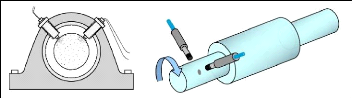
Fig.II.7. Capteur de déplacement pour les
paliers lisses. [37] [34]
Le capteur de déplacement est utilisé pour
toutes les applications où la surveillance des jeux entre les arbres et
les paliers s'avère essentielle. C'est pourquoi l'on retrouve des
capteurs de déplacement installés sur la plupart des turbines
hydroélectriques et des turbomachines.
II.3.1.1. Principe de fonctionnement
Un oscillateur (appareil qui génère un signal
oscillatoire) envoie un signal d'amplitude constante à très haute
fréquence au capteur. Le signal, appelé signal porteur, produit
un champ magnétique en passant au travers de la petite bobine
située à l'extrémité du capteur.
L'arbre situé à proximité absorbe une
partie de l'énergie du champ magnétique qui, à son tour,
produit une réduction proportionnelle de l'amplitude du signal porteur
(modulation).
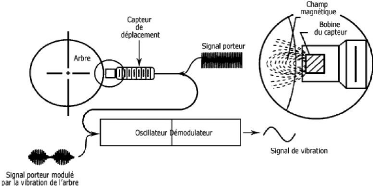
Fig.II.8. Schéma de fonctionnement d'un capteur
de déplacement. [33]
Plus l'arbre se rapproche du capteur, plus l'amplitude du
signal s'en trouve affectée. La modulation du signal porteur traduit
donc l'importance du déplacement relatif de l'arbre par
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 36
rapport au palier. Le signal est ensuite
démodulé et la vibration, déplacement de crête-
à-crête, est mesurée.
L'unité utilisée est le um (10-6 m) ou
le mils (10-3 pouce) : 1 mils = 25,4 um.
II.3.1.2. Avantages
Les principaux avantages associés à l'emploi du
capteur de déplacement sont :
· la mesure directe du mouvement de l'arbre ;
· l'absence d'usure (aucun élément mobile)
;
· la mesure faite directement en unités de
déplacement ;
· le fonctionnement jusqu'à des fréquences
extrêmement faibles.
II.3.1.3. Inconvénients
Les principaux désavantages associés à
l'emploi du capteur de déplacement sont :
· la mauvaise qualité du signal
occasionnée par la présence d'irrégularités
à la surface des arbres ;
· l'installation minutieuse requise ;
· la très faible gamme dynamique du capteur (la
gamme dynamique est le rapport de l'amplitude la plus élevée
à l'amplitude la plus faible qui puisse être mesurée) qui
est de l'ordre de 100/1 ;
· la gamme de fréquences limitée du
capteur qui n'excède pas en pratique 200 Hz. II.3.2. Capteur de
vitesse (Vélocité)
Le capteur de vitesse produit un signal électrique
directement proportionnel à la vitesse de la vibration absolue
mesurée. On l'utilise pour la surveillance générale des
vibrations sur les machines industrielles. Il existe plusieurs types de
capteurs de vitesse, par exemple capture à bobine mobile, capture
à une sonde photo-électrique et capture à une
lumière stroboscopique.
II.3.2.1. Capteur à bobine mobile
(Classique)
Pendant de nombreuses années, les seuls types de
capteurs de vitesse disponibles pour la surveillance des machines
étaient ceux utilisant une conception à bobine mobile.
II.3.2.1.1. Principe de fonctionnement d'un capteur de
vitesse à bobine mobile
Ce capteur compose essentiellement d'une bobine
supportée par des ressorts et d'un aimant permanent fixé au
boîtier du capteur (figure II.9). L'aimant fournit un puissant champ
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai
- Cas d'un Disque Tournant - 37
magnétique autour de la bobine suspendue. Lorsque le
capteur est fixé sur une machine qui vibre, l'aimant permanent suit le
mouvement de la vibration pendant que la bobine demeure stationnaire. Dans ces
conditions, le mouvement du champ magnétique qui traverse la bobine
génère une tension dont l'amplitude est proportionnelle à
la vitesse de la vibration. Le signal est ensuite transmis du capteur au
mesureur de vibrations.[33]
Connecteur
Broches de connecteur
Masse inertielle suspendue (cadre de la
bobine)
Boîtier du capteur Bobine
Ressorts de suspension Aimant
Boulon de
Fig.II.9. Capteur de vitesse à bobine mobile
[33][38] L'unité utilisée est le mm/s ou pouce/s.
1 po/s = 25,4 mm/s.
II.3.2.1.2. Avantages
Les principaux avantages associés à l'emploi du
capteur de vitesse sont :
· un signal électrique de sortie
généré sans avoir recours à une source
d'alimentation externe ;
· la simplicité de l'instrumentation requise pour
la mesure du signal.
II.3.2.1.3. Inconvénients
Les principaux désavantages associés à
l'emploi du capteur de vitesse sont :
Chapitre II l'Analyse Vibratoire, Captures et
Identification des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 38
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
- l'usure des éléments mobiles,
- la grande dimension du capteur,
- une faible gamme dynamique de l'ordre de 1000/1,
- la sensibilité du capteur aux champs
magnétiques,
- la sensibilité du capteur à son orientation,
- la limite élevée dans les basses
fréquences (> 10 Hz).
II.3.2.2. Capteur photoélectrique
(Moderne)
Les capteurs photoélectriques sont constitués
d'un émetteur ou source lumineuse, dont les rayons lumineux sont
détectés par un récepteur. La différence de signal
lumineux, acquise lors de l'interruption de ce rayon, est transformée en
un signal électrique, et est mesurée et utilisée par un
circuit électrique. La lumière utilisée est soit
infrarouge, soit rouge. En utilisant cette lumière, on peut créer
différents types de capteurs photoélectriques. Il existe des
modèles de capteurs à réflexion avec réflecteur ou
réflexe. Ce type est également équipé d'un
émetteur et d'un récepteur proches l'un de l'autre. La
réflexion de la lumière émise est acquise à l'aide
d'un ou plusieurs réflecteurs.
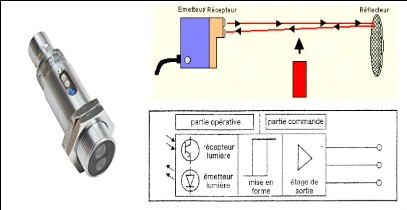
Fig.II.10. Capteur de vitesse photoélectrique
[39] [40] [41] II.3.3.
Accéléromètre
L'accéléromètre produit un signal
électrique directement proportionnel à
l'accélération de la vibration absolue mesurée.
L'accéléromètre est le type de capteur le plus
répandu aujourd'hui pour les mesures de vibrations des machines. Sa
conception permet de mesurer efficacement non seulement
l'accélération, mais aussi la vitesse et le déplacement
(absolue).
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 39
En effet, les instruments de mesure qui utilisent un
accéléromètre comportent des circuits électroniques
(intégrateurs) permettant de sélectionner le paramètre de
vibration requis.
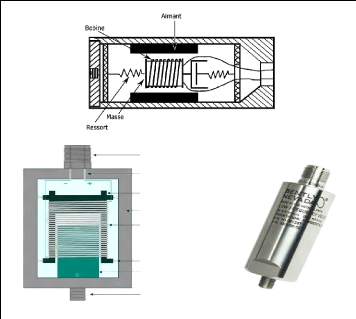
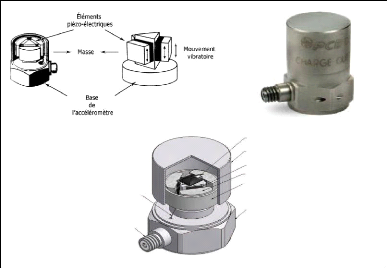
II.3.3.1. Principe de fonctionnement
Le coeur de l'accéléromètre est
constitué de petits éléments d'un matériau
piézoélectrique. On qualifie un matériau de
piézoélectrique quand une déformation du matériau,
par compression ou par cisaillement, produit un signal électrique.
La figure suivante vous montre le schéma d'un
accéléromètre où une masse est rattachée
à chacun des éléments piézoélectriques. Le
mouvement vibratoire de la base de l'accéléromètre est
transmis à la masse qui agit à son tour sur chaque
élément piézoélectrique avec une force égale
au produit de la masse par sa propre accélération.
Ceux-ci produisent alors une charge électrique
proportionnelle à la force appliquée. Les masses étant
constantes, la charge produite par les éléments est
également proportionnelle à l'accélération des
masses.
Fil conducteur
Connecteur électrique
Circuit du capteur ICP ®
Couverture
Matériau piézoélectrique Masse
séismique
Bague de précharge
Base avec trou de montage taraudé
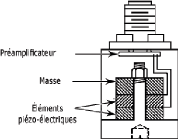
Fig.II.11. Schéma d'un
accéléromètre. [33][35]
Le signal fourni par un accéléromètre
possède un niveau si faible qu'il doit passer par un
préamplificateur de charge dans le but d'en faciliter la mesure et
l'analyse. Le rôle du préamplificateur consiste essentiellement
à convertir la charge produite par la déformation des
éléments piézoélectriques en un signal de tension
équivalente.
L'unité utilisée est le m s-2 ou le g
:
Chapitre II l'Analyse Vibratoire, Captures et
Identification des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 40
1 g = 9,81
m/s2.
II.3.3.2. Avantages
Les principaux avantages associés à l'emploi d'un
accéléromètre sont :
· Une gamme dynamique très grande,
· Une gamme de fréquences très large,
· Un signal électrique de sortie
généré sans avoir recours à une source
d'alimentation externe,
· L'absence d'éléments mobiles,
· Un montage possible dans n'importe quelle
direction,
· Une excellente performance dans les conditions
environnementales les plus sévères,
· La faible dimension des capteurs.
II.3.3.3. Inconvénients
Les principaux désavantages associés à
l'emploi de l'accéléromètre sont :
· l'impossibilité d'effectuer des mesures
à des fréquences extrêmement faibles (< 0,1 Hz),
· le traitement du signal provenant de
l'accéléromètre qui requiert une technologie plus
sophistiquée, et donc plus dispendieuse, que celles utilisées par
les deux autres types de capteurs.
II.3.3.4. Accéléromètre à
préamplificateur intégré
Un nombre croissant d'accéléromètres sont
équipés aujourd'hui d'un préamplificateur
intégré (figure II.12). Ils nécessitent une source
d'alimentation externe à courant constant qui est beaucoup plus facile
à construire qu'un préamplificateur de charge conventionnel.
Néanmoins, l'électronique intégrée
aux accéléromètres restreint les gammes dynamiques et
thermiques de ceux-ci. Par exemple, la gamme des températures typiques
d'un accéléromètre est de - 70 à 250°C, alors
qu'elle est limitée à une plage allant de - 50 à
125°C pour un accéléromètre à
préamplificateur intégré.[33]
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 41
Fig.II.12. Schéma d'un
accéléromètre à préamplificateur
intégré. [33] II.3.3.5. Montage de
l'accéléromètre
Dans toutes les mesures de vibration, la qualité et la
fiabilité du signal d'entrée ont une importance cruciale. En
effet, l'instrument de mesure le plus sophistiqué ne peut pas produire
des résultats fiables à partir de données qui ne le sont
pas. Aussi, comme la nature des vibrations varie selon le type de
défauts rencontrés sur les machines, le capteur de vibrations
doit fonctionner dans une gamme très étendue et de façon
sûre.
En ce sens, le montage même de
l'accéléromètre aura un effet significatif sur le
résultat des mesures et c'est pourquoi vous devez y accorder une
attention toute particulière.
Le choix de l'emplacement de montage de
l'accéléromètre doit être fait en considérant
une position qui reflète la direction du phénomène
vibratoire visé par la mesure. De plus,
l'accéléromètre doit toujours être monté,
chaque fois que cela est possible, dans une position qui assure un chemin de
transmission court et rigide vers la source des vibrations.
Comme les forces internes d'une machine sont transmises
à l'ensemble de la structure par l'entremise des paliers, ceux-ci sont
considérés comme de bons emplacements pour le montage d'un
accéléromètre.
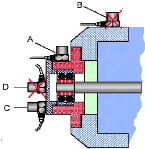
La figure II.13 montre le schéma d'un palier sur lequel
les accéléromètres ont été placés en
vue d'assurer un trajet direct aux vibrations provenant du roulement.
L'accéléromètre (A) mesure directement
les vibrations radiales du roulement, tandis que
l'accéléromètre (B) mesure des vibrations qui sont
modifiées par leur transmission à travers un joint
superposé aux vibrations des autres composants de la machine. De
façon similaire, l'accéléromètre (C) est
placé sur un trajet de vibration plus direct que
l'accéléromètre (D).
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 42
Fig.II.13. Positionnement des
accéléromètres sur un palier. [34]
Vous aurez compris que les positions B et D ne sont pas
recommandées et que le choix entre les positions A et C dépend
uniquement de l'objectif visé par la mesure.
|
Il existe 3 plans de mesure :
1) Radial
- V vertical
- H horizontal - O oblique
2) Axial A
|
|
O
|
Fig.II.14. Plans de mesure [42]
L'accéléromètre : doit être
situé au-dessus du palier d'intérêt. Évitez autant
que possible les espaces d'air dans les boîtiers. Les espaces d'air
fausseronts les mesures des vibrations.
Roulements 3 et 4 interne de moteur
Accéléromètre
Fig.II.15. Les positions de placement d'un
accéléromètre [43] II.3.4. Choix du
capteur de vibrations
Si les capteurs de déplacement relatif sont tout
indiqués pour certaines applications spécifiques de surveillance
d'arbres, les capteurs sismiques, sensibles aux vibrations absolues, sont mieux
adaptés à la surveillance générale des machines.
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
Bien que les capteurs de déplacement relatif aient une
gamme de fréquences pouvant aller (théoriquement) jusqu'à
10 000 Hz, ils ne peuvent détecter efficacement que les composantes
fréquentielles en basses fréquences. Leur gamme dynamique ne peut
habituellement pas couvrir les harmoniques supérieurs de la vitesse de
rotation de l'arbre ou du rotor.
Les capteurs sismiques les plus courants sont le capteur de
vitesse et l'accéléromètre piézoélectrique.
L'accéléromètre est de loin le plus utilisé en
raison de sa grande gamme dynamique, de l'étendue de sa gamme
fréquentielle, de ses dimensions réduites, de sa fiabilité
et de sa robustesse.
En effet, comme beaucoup de situations de surveillance
nécessitent un gamme de mesures en fréquences bien
supérieures à 1000 Hz et une détection d'amplitudes dans
un rapport dépassant largement 1000/1, le choix de
l'accéléromètre piézoélectrique s'impose de
lui-même.
Une comparaison visuelle de la gamme dynamique et de la gamme
de fréquences des capteurs de vibrations vous est montrée
à la figure II.16. [33]

Fig.II.16. Gamme dynamique et gamme de fréquences
des capteurs. [33] II.3.5. Influence de la grandeur
utilisée
Les capteurs associés transforment la vibration
mécanique en un signal électrique : capteur de proximité,
capteur de vitesse, accéléromètres. La mesure de
déplacement s'effectue à l'aide de capteur de proximité
(champs magnétiques) , la mesure de vitesse s'effectue à l'aide
de capteur de vitesse (courant induit dans une bobine ; Cette technique est peu
utilisée).
Les capteurs de mesure de l'accélération les
plus utilisés sont les accéléromètres
piézoélectriques. A partir de l'accélération, on
peut calculer par intégration successive la vitesse et le
déplacement.
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 43
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
Analyse Vibratoire des Machines sur un Banc d'Essai - Cas
d'un Disque Tournant - 44
Chapitre II l'Analyse Vibratoire, Captures et Identification
des Défauts
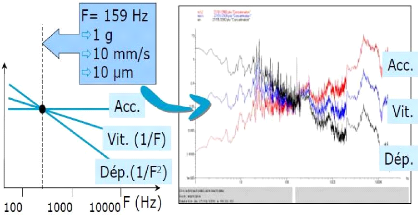
Fig.II.17. Influence de la grandeur utilisée.
[32]
| 

