I.6.7.5. Déséquilibre de couple
Reprenons l'exemple précédent en
remplaçant la masse M par 2 masses identiques mais
décalées de 180° et placées à chaque
extrémité du rotor. L'analyse temporelle des amplitudes du signal
vibratoire montre que les signaux en P1 et P2 sont
déphasés, En effet, les deux paliers supportant
le rotor vont subir des efforts centrifuges de façon alternée. Le
déphasage est en théorie de 180°.
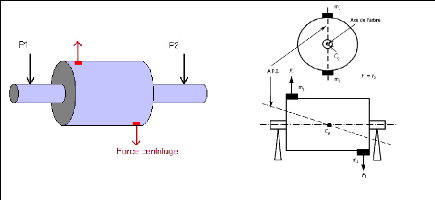
Fig.I.24. Déséquilibre de couple
[31] [28]
La différence entre l'équilibre statique et
l'équilibre de couple est illustrée à la figure I.25. On
peut voir que lorsque le rotor est immobile, les masses
d'extrémité s'équilibrent mutuellement. Cependant,
lorsqu'il tourne, un fort déséquilibre se produit.
Fig.I.25. Équilibre statique,
déséquilibre du couple [28] I.6.7.6.
Déséquilibre dynamique
Il est la combinaison d'un déséquilibre statique
et d'un déséquilibre de couple et constitue le type de
déséquilibre le plus courant dans les rotors. Pour corriger le
déséquilibre dynamique, il est nécessaire d'effectuer des
mesures de vibrations pendant que la machine est en marche et d'ajouter des
masses d'équilibrage dans deux plans.

Fig.I.26. Déséquilibre dynamique
[28]
I.7. Conclusion
Dans ce premier chapitre nous avons vu quelques
généralités sur les machines asynchrones qui sont
largement utilisées dans le domaine industriel en raison de leur
fiabilité, leur robustesse, le peu de maintenance qu'elles
nécessitent et leur prix. Mais "Rien n'est parfait" comme le dit le
psychologue australien Hugh Mackay, pour cela nous avons présenté
les principaux défauts qui se produisent dans les machines asynchrones
qu'ils soient internes ou externes, ces défauts ont une cause directe ou
indirecte de vibrations.
Pour résoudre ces problèmes, il faut
réduire les vibrations, dans le Chapitre suivant nous allons discuter
l'analyse vibratoire des machines électriques.
| 

