2.1 Implémentation logicielle vs
implémentation matérielle d'une application
2.1.1 Implémentation logicielle (Figure 3.a)
Dans un modèle d'exécution logicielle, le
traitement est séquentiel et exécuté par un processeur. En
effet, un CPU (Central Processing Unit) exécute une tâche (ou une
operation) à la fois. Toute application est découpée en
tâches unitaires exécutées les unes à la suite de
autres (Figure 3.a). Le passage d'une tâche à l'autre
nécessite une sauvegarde de contexte (context switch) qui permet de
conserver la cohérence globale de l'application, et donner une apparence
d'exécution parallèle des tâches. Mais ce modèle
nécessite des processeurs de plus en plus rapides pour répondre
à la complexité algorithmique des applications. Or les
fréquences de fonctionnement des processeurs ne sauraient être
augmentées indéfiniment a cause d'une part des limites
technologiques, et d'autre part d'une augmentation de la consommation qui n'est
pas souhaitable dans les systèmes embarqués.

Figure 3 : Implémentation temporelle vs
implémentation spatiale [13]
2.1.2 Implémentation matérielle (Figure
3.b)
Par contre dans un ASIC ou un FPGA, les applications
(algorithmes, fonctions, etc...) décrites dans un langage de description
de circuits (VHDL, Verilog, etc...) sont implémentées
matériellement; ceci apporte un gain de performance supérieur
à celui des processeurs grâce à l'implémentation
spatiale (parallèlisme) des tâches [13]. En effet dans ce type
d'implémentation matérielle, seul le temps de propagation des
signaux de l'entrée à la sortie d'un système fixe sa
limite supérieure en fréquence.
En outre, la reconfigurabilité dynamique de
certains FPGAs permet de faire évoluer l'architecture pour s'adapter au
traitement (Figure 3.c), contrairement aux ASICs. Il est aujourd'hui
envisagéable d'implémenter et d'exécuter
séquentiellement sur ce type de composants reconfigurables plusieurs
algorithmes, et de profiter à la fois de leur reconfigurabilité
(flexibilité) et de leur performance. Pour cela une architecture
reconfigurable inclut généralement deux principales parties, une
partie matérielle et une partie logicielle. La partie logicielle
comprend généralement un processeur (à usage
générique - GPP ou orienté traitement du signal -
DSP) chargé du contrôle et de la gestion de la
reconfiguration de la partie
matérielle, ainsi que de l'exécution des
tâches encore dévolues au logiciel. Elle utilise la partie
matérielle (un ou plusieurs FPGAs) comme accélérateur
matériel, en y implémentant les parties les plus critiques des
traitements.
Le tableau comparatif ci-dessous (Table 1) permet de
situer les FPGAs parmi les principaux types d'architectures et leurs
caractéristiques [6].
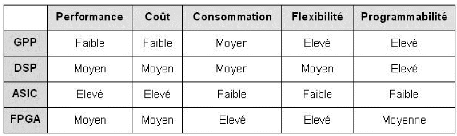
Table 1 : Comparatif des caractéristiques de
différentes implémentations [6]
| 

