3.3.2 Conception sous EDK du module « Système
à processeur »
[26] est un tutorial de référence pour cette
conception. Il s'appuie sur un exemple simple permettant de tester
l'Uart. Quelques autres exemples existent sur le site de Xilinx.
a) Architecture du système
Les différents blocs de cette figure sont disponibles
soit sous forme d'IPs prêts à être implementés
à l'aide des ressources logiques du FPGA, soit directement
présents en blocs ASICs sur la puce FPGA (PPC405, ICAP, JTAG). Les
composantes essentielles de ce système sont :
- Le Processeur PPC405
- Le bus PLB (Processor Local Bus) auquel est directement
relié le processeur ; il est plus
rapide.
- Le contrôleur de BRAM (PLB_Bram_if_ctrl) qui permet
d'associer une BRAM au bus
PLB ; cette BRAM servira de mémoire de données
et/ou de programme au processeur.
- Le bus OPB (On-chip Peripheral Bus) permettant de connecter
les autres périphériques
plus éloignés du processeur.
- Le pont PLB-OPB (Plb2Opb_Bridge) reliant les deux bus.
- Le bloc OPB_GPIO permettant de gérer les
entrées/sorties utilisateurs (LEDs, Switch,
ecran LCD) suivant la plateforme de développement
choisie.
- Le bloc OPB_UARTLite implémentant une interface
série UART allégée qui nous
permettra de faire communiquer le système à
processeur embarqué avec un ordinateur PC via l'application
Hyperterminal sous Windows. Côté PC,
l'HyperTerminal nous permettra d'interagir avec le système
embarqué (à travers le clavier et le terminal
émulés) et d'envoyer les fichiers de configuration au
système à processeur via le port série du PC. Pour cela
nous écrirons côté Processeur PPC405 le programme
permettant ce genre d'échanges de données avec
l'HyperTerminal1.
- Le bloc OPB_HWICAP qui est le contrôleur permettant
d'utiliser le port ICAP.
- Le bloc OPB_EMC qui est le contrôleur de mémoire
extérieur (Flash ou SRAM) ; dans
notre cas, nous avons utilisé une SRAM de 1 Mo externe
à la puce et se trouvant sur la carte de développement
utilisée.
- Le bloc PLB_ETHERNET qui implémente une interface
réseau ; nous n'avons pas
implémenté ce bloc dans le design final car nous
n'en avions pas besoin dans l'immédiat.
b) Création de la plateforme matérielle
du système sous Xilinx EDK
A travers son interface graphique XPS, EDK permet de rajouter
de façon interactive au processeur les blocs présentés
figure 26, et d'unifier tout cet ensemble dans un design unique au niveau top
(qu'il appelle par défaut system.vhd).
Les étapes essentielles sont les suivantes [26] :
- Démarrer XPS (Start ? Programs ? Xilinx Platform
Studio 7.1i ? Xilinx Platform Studio).
- Créer un projet a l'aide "Base System Builder"
XPS (File ? Project ? Base System Builder).
- Choisir un répertoire de travail (par exemple
SELF_RECONF_PLATFORM de la Figure 27, sans espace sur le chemin).
- Choisir la carte de développement ciblée
(dans notre cas c'est la carte Virtex-II Pro P4 FG456 Development
Board de Memec Design).
- Configurer le processeur PPC (on peut laisser les
fréquences par défaut proposées par BSB et choisir 100 Mhz
comme fréquence du bus).
- Choisir les périphériques à utiliser sur
la carte (LEDs, Switches, RS232 Uart, Boutons poussoirs).
1 HyperTerminal est un programme qui permet de se
connecter à d'autres ordinateurs, à des sites Telnet, aux forums
électroniques (BBS), aux services en ligne et aux ordinateurs
hôtes, à l'aide d'un modem, d'un câble null-modem ou d'une
connexion TCP/IP (Winsock).
- Rajouter les périphériques du processeur sur
les bus appropriés suivant le schéma de la Figure 27 (ne
pas oublier de rajouter de la mémoire interne BRAM de 16 ou 32 Ko et de
la mémoire externe SRAM ou Flash de 1 Mo, pour l'instant le bloc
PLB_Ethernet peut ne pas être ajouté).
- Générer la plateforme matérielle.
A l'issue de cette génération interactive de la
plateforme matérielle, XPS aurait ainsi créé dans le
répertoire SELF_RECONF_PLATFORM le fichier projet
system.xmp , les fichiers (.mhs et .mss) décrivant
l'architecture du système et quelques autres répertoires de la
Figure 27(a).
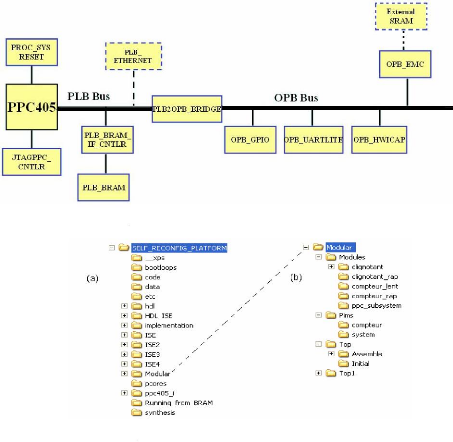
Figure 26 : Architecture du système a
processeur.
Figure 27 : Structure des répertoires du
Projet
Les adresses d'implantations sont attribuées
automatiquement aux différents périphériques dans l'espace
d'adressage du bus auquel ils sont connectés. Mais la plateforme
matérielle (les adresses, les paramètres des blocs IP,
l'Ajout/Suppression de blocs IP, etc...) peut être modifiée
ultérieurement de façon interactive (Project - Add/Edit
Cores....).
c) Création de la plateforme logicielle
Ceci se déroule en deux étapes :
- Génération des pilotes pour les blocs de la
plateforme matérielle ainsi que des librairies
avec la commande Project - Software Platform Setting.
Les fenêtres apparaissant permettent de choisir les versions des
drivers du processeur et des périphériques (laisser les valeurs
par défaut) , les librairies Xilinx à utiliser ( par exemple
cocher Xilnet si on utilise le bloc Ethernet...), le
compilateur à utiliser ( powerpc-eabi-gcc est le compilateur
par défaut), les entrées/sorties standard du processeur
(Stdin/Stdout, ici ce sera l'Uart). Ensuite les librairies
peuvent être générées ( Tools - Generate
Libraries and BSPs).
- Développement des applications pour le processeur
embarqué. Sur la fenêtre System en
haut à gauche sous XPS permettant de voir
l'architecture de la plateforme générée, on peut cliquer
sur Applications pour voir les applications destinées au
processeur. Cette fenêtre permet de créer de nouveaux projets pour
le processeur, d'ajouter les programmes à éxecuter, et d'indiquer
au processeur la mémoire de boot (Bram ou Sram), etc... A ce stade,
Xilinx fournit des programmes simples (hello word, xil_printf,...)
permettant de tester la plateforme en utilisant le clavier et l'ecran d'un PC
comme des entrées/sorties standards du processeur via l'Uart et
l'HyperTerminal.
d) Gestion de la mémoire et
génération du linker script
Notre architecture comprend une mémoire (BRAM) interne
au FPGA et connectée au bus PLB et une mémoire externe SRAM (SRAM
de 1 Mo se trouvant sur la carte d'extension P160 Comm) connectée au bus
OPB. A cause de leur petite taille et de leur distribution sur la puce (il
serait très coûteux en ressources FPGAs de les associer et de les
connecter au bus PLB), les BRAM ne sont pas appropriées comme
mémoire de stockage des bitstreams de configuration. Ces
dernières peuvent etre stockés en SRAM externe.
Le processeur démarre toujours par un programme initial
de boot en BRAM et peut ensuite être dérouté vers
un programme se trouvant en mémoire SRAM externe à l'aide de
XMD1.
Le Linker script est un fichier de script indiquant
les sections du code et les zones mémoires qui les contiendront. Il sert
lors de la compilation du code sous EDK. Lors de la génération
automatique du fichier Linker script, toutes les sections du code sont
automatiquement mises en mémoire BRAM par défaut. Dans notre
application, il est nécessaire de modifier ce fichier pour
1 Xilinx Microprocessor Debugger se
lance sous EDK par Tools - XMD ; il permet de charger en SRAM externe
l'executable .elf et de brancher le processeur sur ce code. En effet, lorsqu'on
fait Tools - Update Bitstream, un programme est chargé par défaut
dans la BRAM interne (Bootloop.c). C'est une boucle infinite 'exécut
é par le processeur. Pour que le processeur BOOT sur un programme il
faut aller a la fenetre «Application», cliquer droit sur le projet
Software concerne et choisir «Initialize BRAM». Le
envoyer certaines sections en mémoire SRAM
externe1 (comme la section .data par exemple car c'est
celle dans laquelle les bitstreams de configurations seront chargées) ;
en effet la BRAM n'est pas assez capacitive pour contenir les fichiers
bitstreams des modules.
e) Implémentation du systeme à
processeur
On peut à présent générer le
fichier bitstreams correspondant à la plateforme matérielle
générée plus haut, afin de configurer le FPGA. Pour cela
il faut choisir ajouter au projet un fichier de contraintes (.ucf)
spécifiant les connexions des les options de projet. A ce stade,
deux cas se présentent :
(i) Déroulement de tout le flot sous EDK afin
de tester et valider le module.
Project - Options - Hierarchy and flow (This is the toplevel
of my design) - Synthesis Tool (ISE XST ) - Implementation tool flow
(XPS_Xflow) - Ok
Tools - Clean , Tools - Generate libraries
Tools - Built user application : génère
l'exécutable destiné au processeur.
Tools - Generate netlist : fait la synthèse de la
plateforne matérielle (fichiers .ngc).
Tools - Generate bitstream : génère le
fichier system.bit permettant de configurer le FPGA et d'y
implémenter la plateforme matérielle de la Figure 26.
Tools - Update bitstream : associe
l'exécutable (.elf) destiné au processeur au fichier
system.bit de configuration du FPGA et génère en fichier
unique download.bit téléchargeable dans le FPGA. Cette
commande lancée toute seule déroule automatiquement les
étapes précédentes de la génération des
librairies à la génération du fichier
download.bit.
A ce niveau, l'outil Impact permet de configurer le
FPGA avec le fichier download.bit. A la fin de la configuration du
FPGA, le processeur exécute le programme chargé en
mémoire. On peut alors vérifier et valider les plateformes
matérielles et logicielles du système.
Remarque: Il peut arriver que le lancement du programmateur de
FPGA depuis XPS échoue ; dans ce cas démarrer l'outil
Impact...
Démarrer-9 Programmes - Xilinx ISE 7.1i -9Accessoires
Æ Impact
...ensuite choisir le mode de programmation (Boundary
Scan par exemple), puis joindre le fichier download.bit et
programmer le FPGA.
programme choisi pour initialiser la BRAM est celui dont
l'exécutable ( .elf) servira a générer le fichier
download.bit.
1 Pour envoyer certaines sections du
code en mémoire SRAM, on peut le faire graphiquement (voir [Xilinx 08])
ou manuellement en éditant le fichier Linker_script et en redirigeant
les sections du type data (.data, .sdata), .sbss, et .text vers la SRAM. Bien
entendu les sections de boot voire la pile (stack) peuvent rester en BRAM pour
accélerer l'exécution.
Le déroulement entier du flot sous EDK
génère les répertoires suivants (Figure
27.a) :
- Le répertoire hdl qui contient les fichiers
vhdl du module system et de ses composantes (IPs). Ces
fichiers sont générés automatiquement à la
génération de la plateforme matérielle sous EDK.
- Le répertoire « Synthesis » qui
contient tous les fichiers de synthèse générés lors
de la génération de la Netlist sous EDK (Tools - Generate
Netlist).
- Le répertoire « Implémentation »
crée par EDK pour stocker tous les fichiers de netlist
nécessaire à implémenter le module fixe
(system).
(ii) Exportation du système à
processeur vers ISE comme module fixe d'un design
global.
Apres avoir testé et validé le module dans un
flot totalement intégré sous EDK, on doit changer les options du
projet afin d'exporter ce module vers ISE comme module fixe du design
Top de la Figure 24 de la façon qui suit:
Project - Options - Hierarchy and flow (This is a submodule
of my design)
- Synthesis Tool (ISE XST ) - Implementation Tool flow
(XPS_Xflow) - Ok
Le processus est ensuite identique au cas (i) ci-dessus
jusqu'à la génération de la netlist (Tools - generate
netlist), suivi par l'exportation du module vers ISE par la commande :
Tools - Export to ProjNav. En effet, dans ce cas de figure, les
bitstreams ne sont pas générés sous EDK.
Remarque : L'exportation du module vers ISE crée
automatiquement un projet ISE s'il n'existe pas encore.
| 

