2.2.2.3 Rôle dans le robot
Nous avons utilisé ce capteur ultrason pour la
recherche des balles qui ont été placé sur l'aire de jeu
et pour évité les obstacles aussi.
2.2.3. Capteur de couleurs :
Les capteurs de couleurs sont très présents en
robotique. Par abus de langage, on parle de capteurs de couleurs, en
réalité, nous devrions parler de capteurs d'intensité
lumineuse. Ce type de capteur permet d'identifier plusieurs type de surface
ayant des réflexions différentes : un bleu, un rouge et un vert
par exemple.
Nous présenterons un petit composant très
pratique pour ce genre de détection (LDR), En réalité un
capteur de couleur par (LDR) n'existe pas, cela veut dire qu'il faut faire une
conception de ce dernière par le base de capteur d'intensité
lumineuse. Donc La carte de détection de couleur est très simple
dans son principe. Une diode électroluminescente (LED) éclaire la
face intérieure de la bande, et on détecte la lumière
réfléchie grâce à une photo résistance (LDR).
On choisi LED Bleu car elle est très efficace pour détecte les
couleurs suivant : Bleu, Rouge, Vert et Noire. Accompagné d'un
montage permettant de comparer quatre surfaces aux réflexions
différentes.
Nous allons ici expliquer le principe de fonctionnement de
capteurs d'intensité lumineuse (LDR), le capteur LDR est une
photorésistance, une cellule photoélectrique sensible à la
quantité de lumière reçue. Une variation de lumière
(ou d'ombre) provoque une variation de signal. C'est un capteur passif. Donc
elle doit être utilisée soit avec une source de lumière
spécifique, fonctionnant alors comme une barrière tendue entre la
source de lumière et le capteur, soit en tant que capteur d'ambiance
pour suivre l'évolution de l'intensité lumineuse d'un lieu.
Emetteur (LED)
Récepteur (LDR)
Figure 2.11 : le
schéma de principe de la détection d'intensité
lumineuse.
L'émetteur et le récepteur doivent être
positionnés en face de la surface à analyser. La
réflexion de L'intensité lumineuse sera différente selon
la couleur de surface à analyser. La figure 2.12 représente le
brochage de ce capteur.
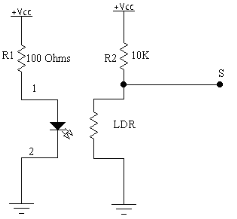
Figure 2.12 :
Schéma développé du capteur de
couleurs.
2.2.3.1 Principe de fonctionnement :
On retrouve sur la droite notre LDR. L'émetteur est
constamment alimenté, une résistance de 100 ohms permet une
émission puissante avec protection de DEL. L'entrée du
récepteur est connectée au Vcc par l'intermédiaire d'une
résistance R2 Pull Up pour éviter le court circuit
lorsque la résistance de LDR est très petite. Selon la
luminosité de la LED reçue sur la base du LDR, la tension sur la
sortie du LDR va varier entre 0 et 5 Volts. Ce qui nous intéresse ici
est de discerner plusieurs états, selon la couleur imposée. Nous
allons utiliser un convertisseur de tensions du microcontrôleur (module
ROVIN) pour comparer la tension reçue du LDR, donc on a chaque couleur
une valeur en décimale correspondant a ça couleur. Ce capteur
fonctionne tés bien lorsque les conditions ambiantes restent
invariables. La lumière artificielle ou naturelle qui vienne perturber
le bon fonctionnement du capteur. Pour éviter ce genre de
problème, il faudrait protégé bien LDR de la
lumière extérieur.
S(v)
3V couleur
rouge
2V couleur
vert
1V couleur
bleu
t
Figure 2.12 : les signaux en
sorite du LDR.
| 

