2.2.3.2 Rôle dans le robot
Nous avons utilisé ce capteur de couleurs pour une
détection la couleur de l'anneau entourant les trous sur l'aire de
jeu.
Capteur gauche
Capteur droit
Figure
1.13 : Système de reconnaissance
des trous.
Le système de reconnaissance des trous est
constitué de deux capteurs de couleurs qui sont placées au
dessous du robot, devant le trou de réservoir des balles et qui sont
séparées par une distance de 8 cm. Quand seulement l'un
des deux capteurs détecte une couleur de la zone d'adversaire le robot
va effectuer les tâches suivantes :
· Si c'est le capteur se trouvant à droite qui a
détecté, le robot tourne a droite jusqu'à ce que l'autre
capteur détecte cette couleur, puis le robot s'arrête pendant un
instant avant d'avancer.
Balle
Réservoir
Capteur gauche
Capteur droit
2
2
1
1
Aspirateur
Figure 1.14 :
Détection et centrage du trou (1ier cas).
· Dans le cas où la détection se fait par le
capteur gauche, le sens de roation du robot s'inverse.
Capteur gauche
Capteur droit
1
Réservoir
2
2
1
Balle
Aspirateur
Figure 1.15 : Détection et
centrage du trou (2ème cas).
· Si la couleur du trou est détectée par les
deux capteurs en même temps, le robot poursuit son mouvement sans
corriger sa direction.
Dans le cas où le robot détecte son
propre trou, il doit éviter de poser une balle blanche dans le trou et
déclenche le système d'aspiration, les étapes à
suivre dans ce cas sont les suivantes :
· si la couleur est détectée par le capteur de
droite, le robot tourne à gauche.
Aspirateur
Balle
Capteur gauche
Capteur droit
Réservoir
Figure 1.16 :
Détection et évitement de marquage dans un trou (1er
cas).
Aspirateur
Balle
Réservoir
Capteur gauche
Capteur droit
2
2
1
1
Figure 1.17 :
Détection et évitement de marquage dans un trou (2ème
cas).
· Si le capteur gauche détecte la couleur en
premier, le robot tourne à droite.
· Si la détection se fait par les deux capteurs en
même temps, le robot effectue demi-tour.
Remarque :
l'expérience à montré que le troisième
scénario ; la détection de la couleur par les deux capteurs
en même temps, est très rare, un capteur dépasse l'autre
dans la majorité des cas.
2.2.4 Les détecteurs de contact :
La détection d'un contact est certainement l'une des
tâche les plus rencontrées dans la robotique mobile. Pour
détecter un contact, nous pouvons utiliser un bouton-poussoir, un micro
rupteur à levier (microswitch ou micro rupteur) ou tout simplement 2
fils dénudés

Microswitch
Bouton poussoir

Figure 1.18 : exemple de
capteur de contact.
Pour notre robot, nous avons utilisé deux microswitchs
pour la détection les totems placés dans l'aire de jeu. Le
schéma ci-dessous montre comment câbler ce capteur.
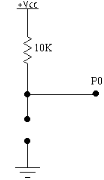
BP
Figure 1.19 : brochage du
capteur de contact.
2.2.4.1 Principe de fonctionnement
Le fonctionnement est simple, Le port du microcontrôleur
est configuré en entrée, c'est-à-dire qu'il va lire une
information. Tant que le bouton poussoir n'est pas actionné, le port est
relié au 5V et le microcontrôleur lit un état haut (1).
Dès que l'on actionne le bouton poussoir, le port est relié au 0V
et le microcontrôleur lit un état bas (0). Donc très simple
Pour programmer une réaction du robot en fonction du cette changement
d'état.
2.3 Conclusion
Dans ce chapitre nous nous sommes intéressé
à la partie perception du robot mobile, nous avons
présenté les différents capteurs utilisés, leurs
principes de fonctionnement ainsi que le rôle que joue chacun deux pour
le bon fonctionnement du robot mobile.
Dans le prochain chapitre nous présentons la partie
électronique du robot mobile, les différentes cartes ainsi que le
module Rovin qui set à contrôler l'ensemble du
 
Chapitre 3 :
| 

