2.2.1.5.1 Asservissement des moteurs
Notre robot possède deux asservissements en position:
l'un pour aller en ligne droite et l'autre pour parcourir une distance. Ces
deux asservissements fonctionnent ensemble. Pour que le robot puisse se
déplacer en ligne droite, les roues doivent être asservies en
position l'une par rapport à l'autre. Le micro contrôleur (module
ROVIN) effectue le comptage des impulsions du moteur de gauche et le comptage
des impulsions du moteur de droite. Périodiquement (dans notre cas,
à chaque nouvelle impulsion) il calcul la différence des deux
compteurs et met à jour la commande du PWM de chaque moteur. Le moteur
qui est en retard se retrouve avec un PWM plus élevé et celui qui
est en avance, un PWM plus faible. Cet asservissement proportionnel suffit pour
que le robot se déplace en ligne droite. 'C' est le coefficient de
proportionnalité du correcteur.
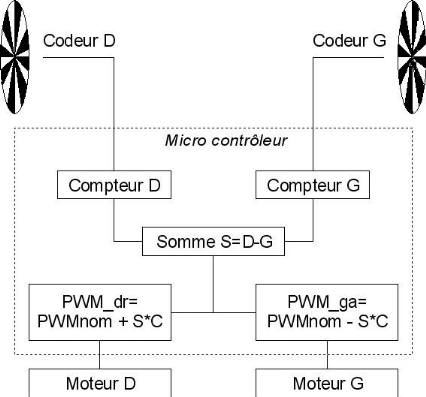
Figure 2.7 :
Schéma synoptique de l'asservissement.
Pour que le robot se déplace sur une distance
donnée, il est asservi en position. Une consigne de distance est
transmise au contrôleur, cette consigne correspond à un nombre
d'impulsion. Dans notre cas, un tour de roue génère 30 impulsions
et un tour de roue déplace le robot de 292mm ce qui donne 9.7mm par
impulsion. Lorsque la moyenne des deux compteurs correspond à la
consigne, le robot est arrivé à destination.
2.2.2 Télémétrie ultrason
Les capteurs acoustiques sont couramment utilisés sur
les robots mobiles d'intérieur, en raison de leur simplicité, de
leur compacité et de leur faible coût. Ils sont mis en oeuvre pour
assurer les bons fonctionnements.
En robotique, on cherche toujours à obtenir le maximum
d'informations sur l'environnement afin de pouvoir adapter le comportement des
robots. Une information particulièrement intéressante à
utiliser est celle concernant la distance. (Distance du robot par rapport
à un obstacle, à une balle, etc.). Le système le plus
communément utilisé en robotique actuellement était le
système de télémètre à ultrasons car elle
est disponible et il a une capacité de mesure de 3cm à 3m. Cela
nous a conduit à opter pour le choix des télémètres
ultrasons (Module MSU04).
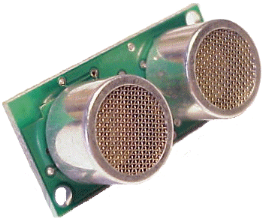
Figure 2.7 : Le
MSU04.
L'avantage de ce télémètre est qu'il
fournit une réponse linéaire ; en effet, il émet une
tension positive entre l'instant de l'émission des ultrasons et
l'instant de leur retour en cas de présence d'obstacle. Il suffit donc
de mesurer la durée pendant laquelle la tension est positive et de
calculer la distance correspondante, connaissant la vitesse de propagation du
son dans l'air. Ce nouveau petit module, est capable de déterminer la
distance qui le sépare d'un obstacle se présentant devant lui
(entre 3 cm et 3 m). Doté de 2 cellules ultrason, son principe de
fonctionnement repose sur celui des "sonars".
2.2.2.1 Principe de fonctionnement
Le principe de fonctionnement de ce capteur repose sur la
transmission d'un «paquet» d'ondes de pression ultrasoniques et de la
mesure le temps après lequel l'écho revient sur le
récepteur. La distance de l'objet qui a produit l'écho peut
être mesurée, connaissant la vitesse de propagation du son dans le
milieu et la durée de vol, d'où :
Distance = (Vitesse de propagation * durée de vol)/2
(2.1)
Dans l'air, à pression standard et à 20°C,
la vitesse du son est d'environ c=343m/s. Les ondes ultrasoniques, qui ont des
fréquences typiques de 40 kHz sont en produite en excitant une
céramique piézo-électrique. Il est doté d'une
sortie délivrant des impulsions dont la largeur comprise entre 100 us et
18 ms est directement proportionnelle avec la distance de l'obstacle qui est
présent devant lui (voir schéma ci-dessus). Il pourra par
exemple être très facilement interfacé avec la plupart des
microcontrôleurs (programmable en assembleur, en langage "C", en Basic,
Pascal...).
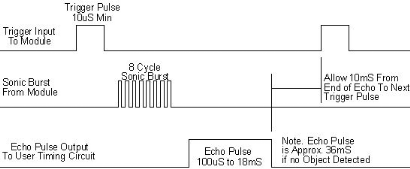
Figure 2.8 : Chronogrammes
caractéristiques du MSU04.
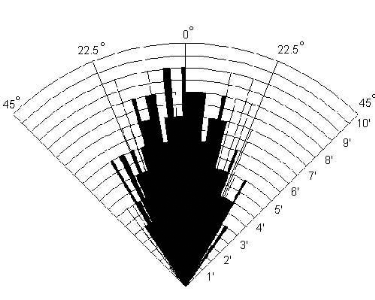
Figure 2.9 : La zone de
propagation des ondes.
2.2.2.2 implantation et caractéristiques
techniques :
- Alimentation: + 5 Vcc.
- Consommation: 30 à 50 mA
environ.
- Angle de détection: 55 ° env.
- Dimensions: 43 x
20 x 17 mm.
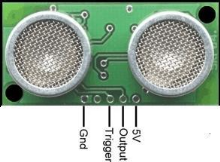

Figure 2.10 : Le
MSU04.
| 

