2.2.1.2 Carte électronique du capteur
Pour notre carte de capteurs finale nous avons utilisé
les deux capteurs. Et ce car nous utilisons l'encodeur pour les roues
arrière de robots, Chacun des deux capteurs est monté selon le
schéma de montage suivant :
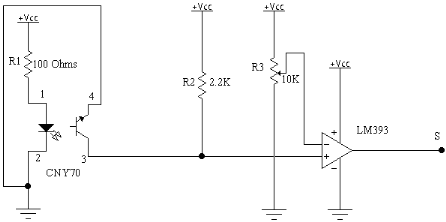
Figure 2.4 : Schéma
développer du capteur optique.
Nous retrouvons sur la gauche notre CNY70. L'émetteur
est constamment alimenté, une résistance R1 de 100
ohms dont le but est d'abaisser la tension à une valeur acceptable pour
l'émetteur et permet une émission puissante. La sortie du
récepteur est connectée au VCC par l'intermédiaire d'une
résistance R2 dont le rôle est de polariser le
transistor. Selon la luminosité infrarouge reçue sur la base du
transistor, la tension sur la borne 3 (collecteur de transistor) du CNY70 va
varier entre 0 et 5 Volts. Ce qui nous intéresse ici est de discerner
deux états : réfléchi ou non réfléchi. Nous
allons utiliser un comparateur de tensions (LM393) pour comparer la tension
reçue du phototransistor avec une tension de seuil réglable
grâce au potentiomètre R3.
2.2.1.3 Le principe de fonctionnement de l'encodeur
Le codeur incrémental (codeur optique) est le capteur
le plus utilisé pour mesurer les variations de position car il est
très peu onéreux et facile à interfacer. Monté sur
l'axe de la roue, il délivre des informations de rotation
élémentaires qui, par intégration, donnent une mesure du
mouvement global. Pour cela, on peut employer des codeurs de résolution
moyenne montés sur l'axe de la roue (notre exemple, 60 points/tour). La
résolution sur la mesure de vitesse de la roue est augmentée dans
un rapport correspondant à celui du système de transmission du
mouvement.
Parmi les différentes technologies de codeurs (optique,
électromagnétique, inductive, capacitive...), les systèmes
optiques sont les plus répandus en robotique mobile. Le codeur optique
rotatif fonctionne selon le principe de balayage infrarouge d'un disque
gradué (roue) noir et blanc. Lorsque ce disque effectue une rotation, si
le capteur est sur la ligne blanche, le signal infrarouge émis par la
diode est réfléchie et capté par la photo transistor.
Nous avons pris comme convention logique que le capteur
transmet, dans ce cas, un `1' logique en sortie. A l'inverse lorsque le capteur
se situe en dehors de la ligne, sur la zone noire, les infrarouges seront
absorbés et le récepteur sera bloqué donc nous avons alors
un `0' logique en sortie du capteur, la sortie du récepteur
délivre un signal carré qui est ensuite utilisé pour
compter les nombres des impulsions.
V
5v
t
Figure 2.5 : La sortie du
récepteur.

Figure 2.6 : Roue gradue
à 60 morceaux.
2.2.1.4 Erreur des encodeurs
Afin de vérifier la validité des mesures
données par les encodeurs, nous avons fait translater le robot à
des vitesses constantes sur une distance de 2m, puis nous
avons comparé les mesures retournées par les encodeurs à
la distance réellement parcourue par le robot. Les résultats
obtenus présentent une légère différence que nous
avons jugé négligeable.
2.2.1.5 Le rôle du capteur dans le
robot
Les capteurs « CNY70 »
à été utilisé pour coder les roues du robot mobile,
les informations fournies par ce capteur nous permettent de concevoir
l'asservissement des moteurs dans le but d'avoir une trajectoire
précise.
| 

