Chapitre 2 :
La partie perception du robot mobile
2.1 Introduction
La capacité d'autonomie d'un robot mobile est
liée à sa faculté de percevoir et d'interpréter son
environnement. Dans ce chapitre nous présentons la partie perception de
notre robot qui se décompose en quatre éléments essentiels
: les encodeurs, télémétrie ultrason, capteur de couleurs
et les détecteurs de contact qui découlent directement des quatre
informations que nous avons choisi pour permettre à notre robot
d'évoluer sur l'aire du jeu et d'accomplir sa tâche.
2.2 La partie perception du robot mobile
Après l'élaboration de la stratégie de
jeu à suivre pour assurer une bonne offensive et une bonne
défensive, nous nous sommes occupés de la partie perception. Le
rôle de la partie perception consiste à fournir les informations
nécessaires à l'accomplissement des principales fonctions de
notre robot, à savoir :
· Le calcule de la distance parcourue ;
· La détection d'obstacles ;
· La recherche des balles ;
· La détection des trous.
Pour cela nous avons choisi les capteurs suivants :
· Un encodeur optique, le CNY70 pour collecter les
informations concernant la position du robot par rapport à l'origine du
mouvement ;
· Un capteur ultrason est utilisé pour la
détection des balles sur l'air du jeu ;
· Un capteur de couleur qui permet de distinguer entre le
rouge et le bleu, et ce dans le but de reconnaître les trous ;
· Des microswichs pour la détection
d'obstacles.
Capteur ultrason
Nature du trou
Capteur de couleur
Capteur de contacts
L'environnement
Partie effectrice
Partie gestion et contrôle des tâches
Position
vitesse
Encodeur optique C NY70
Position
Des balles
Présence d'obstacles
Figure 2.1 : l'organisation
fonctionnelle du robot mobile.
Dans ce qui suit, nous allons présenter chaque capteur,
son mode de fonctionnement ainsi que l'électronique qui permet sa mise
en marche.
2.2.1 L'encodeur optique
Les encodeurs optiques sont des capteurs optiques par
réflexion. Ces encodeurs servent à évaluer la position, la
vitesse ainsi que l'angle du robot par rapport à l'origine et
l'asservissement des moteurs. Il est donc important de connaître le
principe de fonctionnement et de vérifier l'efficacité de ces
encodeurs puisque la commande du robot en dépendra.
2.2.1.1 Le capteur « CNY70 »
Le capteur optique par réflexion CNY70 se
présente sous la forme d'un boîtier cubique avec quatre
broches.


Figure 2.2 : Le
CNY70.
Le CNY70 est un émetteur et un récepteur
infrarouge. L'émetteur et le récepteur sont accordés sur
la même longueur d'onde. L'émetteur est une diode infrarouge
centrée sur la longueur d'onde 950 nm. Le récepteur est un
phototransistor, disposés de sorte que le faisceau émis, le
capteur étant perpendiculaire à une surface plane, soit
réfléchi sur le phototransistor.
Réfléchissant
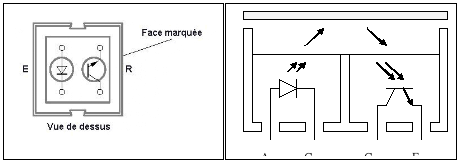
Emetteur
Récepteur
Figure 2.3 : Principe de
fonctionnement du CNY70.
| 

