1.3 Le cahier des charges
Cette année, les participants devaient concevoir puis
réaliser un robot, conforme au règlement, apte à
participer aux matchs dont le thème cette année est le
« Funny Golf ». Le principe est simple : deux
équipes, une rouge et une bleue, s'affrontent sur l'aire de jeu
représenté par la figure 1.2. la durée du matche est de 90
secondes, le but de chacune d'elles est de déposer le plus de balles
blanches (dont les dimensions sont celles d'une balle de ping-pong) dans les
trous de sa couleur c'est-à-dire l'équipe qui mettra le plus de
balles blanches dans les trous de sa couleur sera le vainqueur. Le robot peut
également placer des balles noires dans les tous aux couleurs de
l'adversaire de manière à l'empêcher de marquer des points.
En plus des balles disposées au départ sur l'aire de jeu, il sera
également possible d'activer des éjecteurs de balles
supplémentaires en cours de partie par contact avec des totems
disposés sur la table.
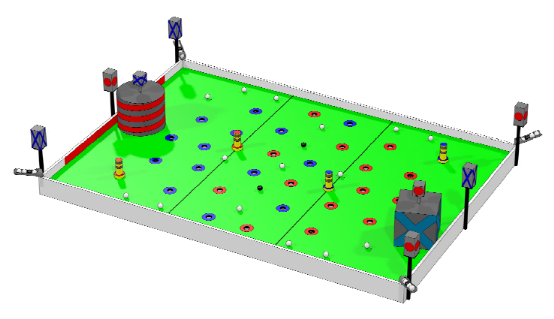
Figure 1.2 :
Représentation de l'aire du jeu.
1.3.1 L'aire de jeu
L'aire de jeu est rectangulaire et mesure 2,10 m de large sur
3,00 m de long. Elle est peinte en vert. Deux lignes noires de 0.5 cm de large
sont peintes à 105 cm des bordures les plus petites (ces lignes passent
par le milieu de l'une des positions possibles pour les totems). L'aire de jeu
est composée de :
· Un plateau rectangulaire peint en vert avec deux lignes
noires qui divisent l'aire de jeu en trois parties.
· 28 trous. Chaque trou est entouré d'un cercle
bleu ou rouge.
· 31 balles blanches: 15 sur l'aire de jeu, et 4 dans
chaque mécanisme d'éjection des balles. 11 des 15 balles blanches
situées sur l'aire de jeu sont placées à des endroits
prédéterminés. Les 4 autres sont positionnées
aléatoirement.
· 10 balles noires: 6 sur l'aire de jeu (2 sur la ligne
médiane et 4 disposées aléatoirement dans des trous - 2
par côté - au début de la partie) et une dans chaque
mécanisme d'éjection des balles.
· 4 totems sont positionnés aléatoirement
au début de la partie, avec une symétrie centrale. (voir le
schéma pour voir les différentes positions possibles.)
· 4 systèmes d'éjection des balles
(contenant 4 balles blanches et 1 balle noire), un dans chaque coin du terrain.
Chaque totem est relié au système d'éjection de balle
situé à l'opposé de l'aire de jeu (symétrie
centrale).
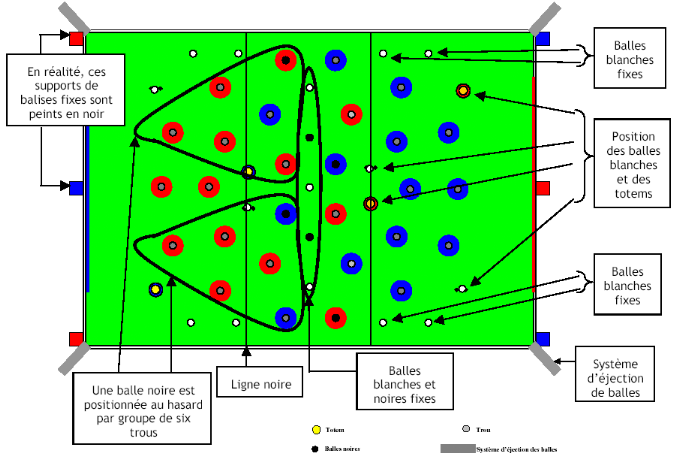

Totem Trou Balles noires
Balles blanches Système
d'éjection des balles
Figure 1.3 : Disposition des
éléments de l'aire du jeu.
1.3.1.1 Les totems
Quatre totems sont présents sur l'aire de jeu. Ce sont
des cylindres de 52 mm de diamètre et de 147 mm de hauteur. Ils sont
fabriqués en plastique (PVC). Le haut des totems est fermé. Pour
activer un totem, un robot doit créer un contact électrique entre
les 2 anneaux métalliques du totem. Les totems ne sont pas
dédiés à l'un des robots : chaque robot peut activer les 4
totems. Au début de la partie, les totems sont disposés
aléatoirement sur l'aire de jeu. Chaque totem est lié au
mécanisme d'éjection de balle situé à son
opposé sur l'aire de jeu (selon une symétrie centrale).
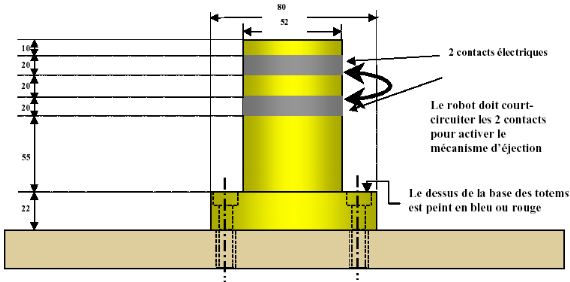
Figure 1.4 : Structure d'un
totem.
1.3.1.2 Système d'éjection
de balles
A chaque coin de l'aire de jeu, il y a un système de
libération des balles. Au début de la partie, chaque
système d'éjection de balle contient cinq balles : quatre
blanches et noire, dans l'ordre représenté par la figure
ci-dessous.
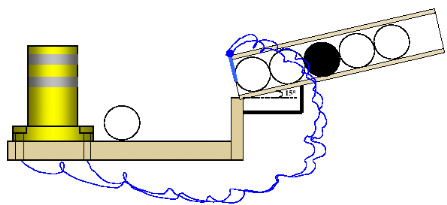
Figure 1.5 : Disposition des
balles dans l'éjecteur.
1.3.2 Robots
Le cahier des charges contient de longues conditions concernant
les robots, dans ce qui suit nous avons essayé de résumer
l'essentiel de cette partie.
1.3.2.1 Equipements obligatoires
Les robots doivent obligatoirement comporter :
· Un dispositif de démarrage situé sur le
robot et d'accès facile, déclenché par un cordon d'une
longueur minimale de 500 mm actionnant le système. Ce cordon ne doit pas
rester sur le robot après le départ. Tout autre système
(télécommande, interrupteur...) ne pourra pas être
homologué.
· Un interrupteur d'arrêt à pression ("coup
de poing") doit être installé dans les limites des dimensions de
chaque robot. Cet interrupteur doit être mis en valeur par un signe
distinctif rouge d'au moins 20 mm de diamètre ; il doit être
placé en évidence sur une zone non dangereuse et d'accès
immédiat et vertical pour l'arbitre à tout moment du match. Cet
interrupteur est un arrêt d'urgence de la puissance moteur et des
actionneurs.
· Les robots doivent comporter une minuterie de
façon à s'immobiliser ou à être hors service
à la fin du temps de match de 90 secondes.
1.3.2.2 Contraintes spatio-temporelles
Les équipes sont autorisées à
prévoir un déploiement pour leur robot. Dans ce cas, il doit
avoir lieu après le signal du départ. On définit le
périmètre d'un robot comme étant le
périmètre de l'enveloppe convexe englobant sa projection
verticale (voir schéma ci-dessous).
· Le périmètre de l'ensemble du robot ne
doit pas excéder 120 cm au moment du départ.
· Le périmètre du robot totalement
déployé ne doit pas excéder 140 cm au cours du match.
· La hauteur du robot déployé ne doit pas
dépasser 30 cm.
 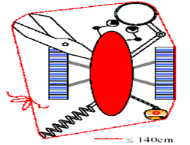
a : Non
déployé. b :
Déployé.
Figure 1.6 : Exemple de
périmètre.
1.3.2.3 Sources d'énergie
Toutes les sources d'énergie sont autorisées
(ressorts, air comprimé, piles ou batteries...) à l'exception de
celles utilisant des produits corrosifs ou pyrotechniques. En ce qui concerne
les batteries, il est demandé d'utiliser exclusivement des
modèles solides afin d'éviter les problèmes liés
aux écoulements d'acide.
1.3.2.4 Système de
contrôle
Les équipes ont le choix des systèmes de
contrôle du robot (analogique, microprocesseur, microcontrôleur,
ordinateur, automate programmable...). Ces systèmes doivent être
intégrés dans le robot.
1.3.3 Déroulement du
match et décompte des points
Une couleur (rouge ou bleu) et un côté de l'aire
de jeu sont attribué à chaque équipe avant chaque match.
L'équipe place son robot non déployé à
l'intérieur de la zone de départ de façon à ce que
le robot soit en contact avec le bord de l'aire de jeu peint dans la couleur
qu'il arbore (rouge ou bleu : rouge pour le robot portant la couleur rouge et
bleu pour le robot portant la couleur bleue). Le robot ne doit pas contenir de
balles avant le début du jeu sous peine de disqualification de
l'équipe.
Deux personnes par équipe sont autorisées
à accéder à l'aire de jeu pour mettre en place le robot.
Les équipes disposent de trois minutes pour placer leur robot sur leur
emplacement de départ. Une fois le robot en place, plus aucune
intervention ni communication d'information extérieure ne sont
autorisées. Quand les deux équipes sont prêtes, l'arbitre
tire au sort les positions des totems et les dispose sur l'aire de jeu. Il
place ensuite les deux balles blanches, sur les deux emplacements libres. Puis,
l'arbitre tire au sort la position des 2 balles noires, les places et place les
2 autres par symétrie centrale. Pendant cette procédure, les
équipes n'ont plus le droit de toucher leur robot.
1.3.3.1 Le décompte des points
Le décompte des points se fait à l'issue du
match. Et chaque balle blanche qui se trouve dans un trou de couleur donne un
point à l'équipe arborant cette couleur. Les balles noires et les
balles blanches qui entreraient dans des trous après la fin du match ne
donnent pas de points.
1.3.3.2 Les
pénalités
Une pénalité consiste à enlever un point
au score final de l'équipe, à la fin d'un match. Tout robot dont
les actions sont incompatibles avec le règlement peut être
pénalisé par l'arbitre. Les arbitres donneront une
pénalité, par exemple, dans les cas suivants :
· un robot heurtant violemment un robot adverse.
· un robot considéré dangereux vis à
vis de la table et/ou du robot adverse.
· un robot dont la stratégie consiste à
empêcher le robot de l'équipe adverse d'accéder aux
éléments du jeu.
· Un robot dont la minuterie ne fonctionne pas.
1.3.3.3 Les forfaits
Le forfait d'une équipe au cours d'un match
entraîne la perte de tous les points acquis lors de ce match.
L'équipe adverse continue le match seul et marque ses points. Sera
déclarée forfait une équipe :
· qui ne s'est pas présentée à temps
sur les tables d'attente (en arrière-scène).
· qui met plus de 3 minutes à être
opérationnelle sur l'aire de jeu.
· dont le robot n'a pas entièrement passé la
ligne noire la plus proche.
1.4 Présentation de la stratégie du jeu
adoptée
Le robot vainqueur est celui qui marque le maximum de points,
en d'autre termes, le robot est désigné vainqueur s'il arrive
à mettre un nombre de balles blanche dans les trous de sa couleur qui se
trouvent à l'autre coté de l'aire du jeu, supérieur au
nombre de balles blanche marquées par le robot adversaire.
Avant de se lancer dans la conception du robot mobile, nous
nous somme intéressés en premier lieu à la mise en oeuvre
d'une stratégie qui permet de marquer le maximum de points. Notre
stratégie du jeu a été l'objet de plusieurs modifications
causées par :
· le manque de composants ;
· les prix élevés des composants existants et
des outils de construction mécanique ;
· la contrainte du temps et les difficultés
techniques ...etc.
Au départ, nous avions remarqué que les trous de
l'aire du jeu sont distribuées sous forme circulaire (voire annexe), et
que les quinze balles posées sur l'aire de jeu sont divisées en
deux type :
· Les balles fixes : qui représentent la
majorité des balles présentes sur la table. Onze des quinze
balles fixes sont blanches, les autres sont de couleur noire. Toutes ces balles
ont des positions bien déterminées par le cahier des charges.
· Les balles non fixes : qui sont quatre balles
posées aléatoirement
Nous avons donc fixé les tâches que peut
effectuer notre robot mobile, à savoir:
- la première est
offensive : le robot doit marquer le maximum de points, il
doit être capable :
1. d'activer les totems qui serviront pour l'activation
des éjecteurs de balles;
2. de ramasser les balles ;
3. de poser les balles dans les trous se trouvant de l'autre
coté de la table.
- la deuxième est défensive :
le robot doit être capable d'extraire des balles de leurs
trous. Cela est nécessaire dans deux cas de figures :
1. pour retirer une balle marquée par erreur par le
robot lui même dans le mauvais trou ;
2. enlever des points à l'adversaire, en retirant les
balles qu'il a marquées.
Pour parvenir à réaliser ces taches nous avons
envisagé une stratégie qui, comme nous l'avons déjà
dit, à subit plusieurs modifications.
Stratégie
n°1 : le robot devait suivre une trajectoire bien
déterminée comme le montre la figure 1.7, cela lui aurait permit
de ramasser plus de quatre balles, avant de rejoindre la zone de l'adversaire.
Le robot devait être capable d'éviter les obstacles après
leur détection. Nous avons renoncé à cette
stratégie, car après plusieurs essaies nous avons conclu que ses
résultats étaient hasardeux.
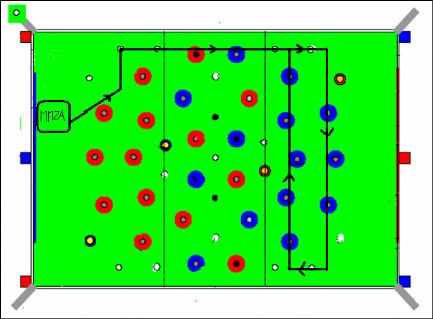
Figure 1.7 : trajectoire de
la stratégie n°1.
Stratégie
n°2 :
Dans cette stratégie nous avons gardé la
poursuite de la trajectoire jusqu'à ce que le robot atteigne la zone de
l'adversaire, à partir de ce moment, le robot doit trouver les trous en
fonction de leur couleur au lieu de leurs positions qui étaient
préprogrammées dans la première stratégie.
Quand un trou est détecté, le robot doit
réajuster sa position en tournant à gauche ou à droite
pour positionner le trou au centre du robot. De cette façon ce trou se
trouvera juste en dessous du trou du réservoir de balles. Suivant la
couleur de ce trou le système d'aspiration ou d'éjection est
activé.
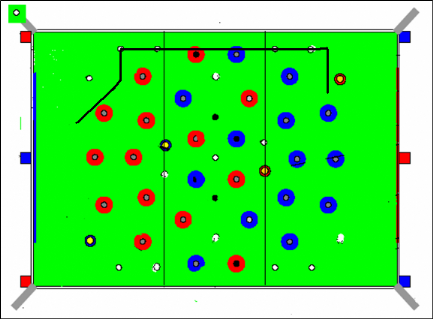
Figure 1.8 : trajectoire de
la stratégie n°2.
La structure de notre robot a été
modifiée plusieurs fois à cause de la difficulté de la
mise en oeuvre des stratégies précédentes tout respectant
le cahier des charges. Et peu a peu nous somme arrivé à la
structure finale de notre robot qui est obéissante au règlements
et qui peut exécuter les tâches suivantes :
· Le robot marche sur l'air de jeu sans glissement, il
est bien positionné sur la table et ne provoque pas de vibrations qui
peuvent perturber le fonctionnement des organes de perceptions, cela à
conduit à l'utilisation d'un système de chenilles, qui en plus de
ça facilite le déplacement du robot sur l'aire du jeu sans buter
dans les trous.
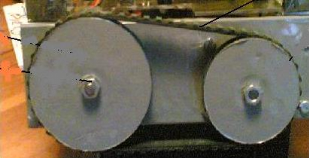
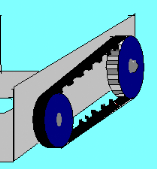
Figure 1.9 : Système
de courroie utilisée.
· Le robot peut ramasser les balles à l'aide d'un
système de ramassage. Ce système de ramassage a été
construit à base d'un morceau d'aluminium, trois lames en plastique
transparent, un servomoteur que nous avons modifié. Les balles
ramassées sont mises dans un réservoir à bord du robot.
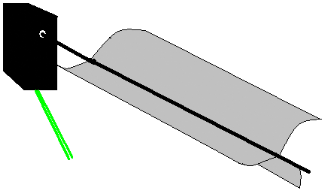
Figure 1.10 : le
système de ramassage.
Réservoir
Système de ramassage
Figure
1.11 : Disposition du système de
ramassage et du réservoir.
· Le robot peut activer les éjecteurs de balles en
provoquant un contacte au niveau des totems, pour cela nous avons
utilisé une plaque de plastique recouverte par une feuille d'aluminium
qui assure le contacte. Une fois le contacte provoqué, le robot recule
et part chercher d'autres cibles. La détection des objets (obstacles)
est assurée par des microswichs placés derrière la
plaquette à l'avant du robot.
· Notre robot est capable de faire la différence
entre nos trous et les trous de l'adversaire, cela est possible en
différenciant la couleur des anneaux entourant les trous. Cela est utile
pour la prise de décision concernant l'éjection ou
l'aspiration.
· Le robot est doté d'un système
d'aspiration des balles qui est destiné pour la défense en
premier lieu. il est constitué d'une pyramide en plastique coupée
à l'angle et d'un moteur à courant continue et une hélice
récupérée à partir d'un sèche cheveux. Ce
système est activé et désactivé en fonctions des
informations délivrées par les capteurs de couleur.
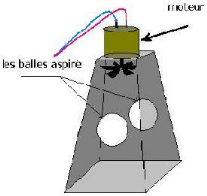
Moteur
Balles aspirées
Hélice
Figure 1.12 : Le
système d'aspiration de balles.
Le robot peut aussi détecter les obstacles, cela lui
permet d'éviter la bordure de l'air de jeu et le robot adverse,
d'éviter les totems dans les stratégies ne nécessitant
pas l'activation des éjecteurs de balles. Ce système se compose
d'un capteur ultrason et de deux boutons poussoirs qui sont placées
à l'avant du robot (fixées avec le pare-chocs).
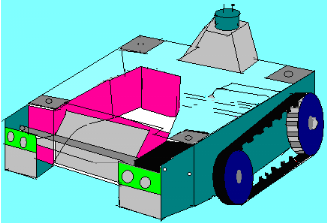
1.5 Présentation générale de robot
mobile :
La figure 1.18 représente la structure
générale de notre robot mobile, qui a été
conçu suivant la stratégie adoptée et
précédemment expliquée.
Détecteurs d'obstacles
Gestion des taches
Système de ramassage des balles
Système de locomotion
Système d'aspiration
Système de détection de couleurs
Système d'activation des éjecteurs des balles
Figure 1.13 : Structure
générale du robot mobile
1.6 Conclusion
Pour exécuter une tâche donnée un robot
mobile autonome a besoin d'informations décrivant son environnement. A
la lumière de ces informations, il peut décider à chaque
instant, de la suite de fonctions qu'il doit exécuter pour le bon
accomplissement de la tâche globale.
Dans notre cas, le robot joueur de golf doit détecter
les obstacles, détecter les couleurs et connaître la distance
parcourue au début du match pour passer dans la zone de l'adversaire,
cela sous entend la mise en oeuvre d'une partie perception fiable car d'elle,
de la précision des informations qu'elle fournie que dépend le
comportement globale de notre robot mobile.
 
| 

