CONCLUSION GENERALE
En apportant quelques modifications sur la conception du
prototype, telles que :
· L'amélioration de la qualité des
tôles du circuit magnétique pour limiter au mieux les pertes
magnétiques.
· La reprise des formes géométriques des
plots statoriques pour une meilleure pénétration des flux et une
réduction du couple résiduel, parasite.
· L'augmentation de la rigidité mécanique de
l'ensemble afin de maintenir l'entrefer constant et éviter les tendances
au collage,
le moteur de structure discoïde conçu par
GEC-ALSTHOM MOTEURS NANCY, a certainement un bel avenir devant lui dans les
domaines de la robotique et de la traction électrique.
De plus, un onduleur de tension utilisant une M.L.I pour
contrôler les courants, une commande vectorielle dans PARK et une
commande de couple et de vitesse, devrait convenir assez bien à ce type
de moteur. Le FILTRE DE KALMAN, tenant compte des études
complémentaires proposées et cités en conclusion du
dernier chapitre, devrait compenser assez bien la suppression du capteur
mécanique.
D'une façon générale et compte tenu des
exigences industrielles imposées sur le marché actuel, je dirais
qu'il n'est plus possible aux concepteurs de moteurs électriques, de
concevoir leur moteur sans tenir compte de l'électronique de puissance
qui va commander le moteur. De même, il n'est plus possible aux
concepteurs de systèmes électroniques de concevoir une
électronique de puissance et une électronique de commande sans
tenir compte de la constitution du moteur.
Les compétences de chacune de ces techniques devront
inévitablement s'associer pour ne
former qu'une seule et unique
puissance technologique d'avenir.
J'espère que ce travail aura donné satisfaction
à la société GEC-ALSTHOM MOTEURS NANCY qui a bien voulu me
confier ce prototype. Je regrette néanmoins de ne pas avoir eu le temps
de conclure ce travail par une expérimentation de la commande avec son
filtre de Kalman.
Pour ma part, cette étude qui a nécessité
une année complète de travail, a été
particulièrement intéressante car elle a rassemblé un
large éventail de techniques complémentaires à celles de
l'électrotechnicien. D'ailleurs, ces techniques vont devenir très
rapidement indispensables aux connaissances de l'électrotechnicien de
demain.
REFERENCES BIBLIOGRAPHIQUES
[1] ALLANO Sylvain - Etude de machines à
réluctance variable polyentrefers alimentées à moyenne
fréquence. Thèse de Doctorat d'état à PARIS 6,
1987.
[2] LUCIDARME J., DESEQUELLES P.F., GOYET R., RIOUX C.,
POUILLANGE J., CREMET G. - Les machines synchrones polyentrefers : Le moteur
C.E.A. (200-300 N.m). Rapport final. Document confidentiel GEC-ALSTHOM
MOTEUR Nancy, 1987.
[3] CREMET Gérard - Notes de calculs sur le
dimensionnement du moteur. GEC-ALSTHOM MOTEUR Nancy, 1987.
[4] SIBOUILLE Michel - La transformation de Park. Application
au moteur synchrone. Sujet de cycle C, C.N.A.M d'Aix, 1992/1993.
[5] BARRET Philippe - Régimes transitoires des
machines tournantes électriques. Collection de la direction des
études et recherches d'électricité de France. Editions
Eyrolles de 1987.
[6] LUCAS Francois - La transformation de Park. Cours du
cycle C, C.N.A.M d'Aix, 1992/1993.
[7] Longya XU, Jiping YAO - A compensated vector control
scheme of a synchronous reluctance motor including saturation and iron
losses. Publication de IEEE INDUSTRY APPLICATIONS SOCIETY, volume 28,
numéro 6 de novembre/décembre 1992..
[8] JOOS Géza, GOODMAN Edward D. - Entrainements
à courant continu. Presse de l'Université du QUEBEC, 1987.
[9] LAJOIE-MAZENC Michel et VIAROUGE Philippe - Alimentation
des machines synchrones. Les techniques de l'ingénieur D 3630, Juin
1991.
[10] REKIOUA Toufik - Contribution à la
modélisation et à la commande vectorielle des machines synchrones
à aimants permanents. Thèse de docteur I.N.P.L., Lorraine
Juillet 1991.
[11] CARON J.P. et HAUTIER J.P. - Modélisation et
commande de la machine synchrone. SEE 3E.I95, Journées
d'études du 30 et 31 Mars 1995.
[12] BOIDIN Patrick- La M.L.I par la technique
numérique. Application aux variateurs à V/f constante et au
contrôle vectoriel. Probatoire C.N.A.M d'Aix du 17 Mars 1994.
[13] DHAOUADI Rached - Application of stochastic filtering
to a permanent magnet synchronous motor drive system without electromechanical
sensors. Thèse de docteur de l'université du Minnesota,
Octobre 1990.
[14] RADIX Jean-Claude - Introduction au filtrage
numérique ; Lissage de données, estimation de paramètres,
identification de processus - exercices et solutions. Ouvrage des Editions
Eyrolles, 1970.
[15] BRUN-PICARD D. - Equations d'état des
systèmes linéaires continus et discrêts. Cours
d'automatismes B1 de l'enseignement CNAM d'Aix en Provence. Année
1992/1993.
[16] DE FORNEL Bernard, FADEL Maurice, PIETRZAK-DAVID Maria,
Joao Carlos Henriques Dos REIS e COSTA - Méthodes d'estimation et
d'observation des variables non mesurables pour le contrôle des machines
à courant alternatif. Toulouse, journées du club EEA du 14 et
15 Mars 1991.
- ANNEXE 1 -
ESSAIS EXPERIMENTAUX ET VALIDATION DU
MODELE.
ESSAIS DU PROTOTYPE : RELEVES ET OSCILLOGRAMMES.
1. ESSAI A VIDE EN FONCTIONNEMENT GENERATEUR. 1.1.
Tableau des relevés :
|
Valeurs calculées:
Ea s n
0
(V/ tr.min-1)
|
|
|
|
|
|
|
0,70
|
|
0,68
|
|
0,67
|
|
0,67
|
|
0,66
|
|
0,68
|
|
0,69
|
|
0,66
|
|
0,63
|
|
0,63
|
|
Moyenne : 0,67
|
|
N°
|
Moteur cc
I
(A)
|
Moteur cc
U
(V)
|
n
(tr/min)
|
Génératrice
Ea 0s
(V)
|
|
1
|
3,65
|
8,3
|
18,5
|
13,0
|
|
2
|
4,35
|
12,0
|
35,2
|
24,0
|
|
3
|
5,00
|
14,2
|
43
|
29,2
|
|
4
|
5,60
|
17,6
|
60
|
40,0
|
|
5
|
5,70
|
18,6
|
66
|
43,5
|
|
6
|
6,10
|
20,5
|
74
|
50,0
|
|
7
|
6,95
|
25,7
|
100
|
66,8
|
|
8
|
7,93
|
31,6
|
129
|
85,0
|
|
9
|
8,57
|
35,7
|
155
|
98,0
|
|
10
|
9,9
|
44,9
|
200
|
126
|
Tab.An1-1 1.2. Tracé de la courbe : n
1-3 ea 0s
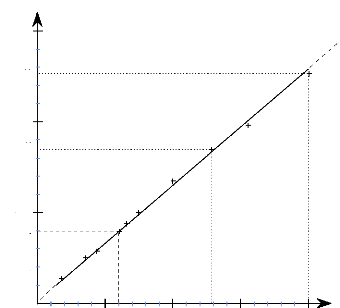
Ea 0s
(V)
150
140
130
120
110
100
90
80
70
60
50
40
30
20
10
n
e a 0 s ( n )
0 10 20 30 40 60 70 80 90 110 120 130 140 160
170 180 190 (tr/min)
50 100 150 200
n n = 60 tr/ min
Fig.An1-1 : F.e.m induite au stator en fonction de la
fréquence de rotation.
2. ESSAI EN COURT-CIRCUIT DES ENROULEMENTS DU STATOR.
2.1. Tableau des relevés :
|
N°
|
Moteur cc
I
(A)
|
Moteur cc
U
(V)
|
n
(tr/min)
|
Génératrice
Icc
(A)
|
|
1
|
3,70
|
13,0
|
34,2
|
1,86
|
|
2
|
3,60
|
14,4
|
41,7
|
1,86
|
|
3
|
3,55
|
16,0
|
53,3
|
1,86
|
|
4
|
3,65
|
18,2
|
64,2
|
1,86
|
|
5
|
3,9
|
21,9
|
83,3
|
1,9
|
|
6
|
4,5
|
31,3
|
133
|
1,9
|
Tab.An1-2 : Relevés du courant de court-circuit au
stator.
3. ESSAI A VIDE EN FONCTIONNEMENT MOTEUR.
3.1. Relevé des oscillogrammes :
· i a 0 ( t ) et v a ( t ) pour U ab = 260 volts et
i a0 = 7 , 2A soit 77%de In et 68% de Un.
Echelles :50 volts/cm, 5A/cm et 5ms/cm
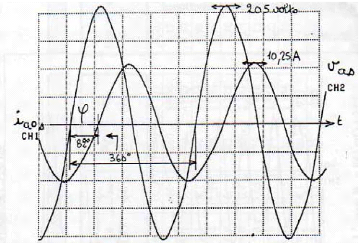
Fig.An1-2
· i a 0 ( t ) et v a ( t ) pour U ab = 135 volts
et i a0 = 3 , 2A soit 34%de In et 36% de Un.
Echelles :50 volts/cm, 2A/cm et 5ms/cm
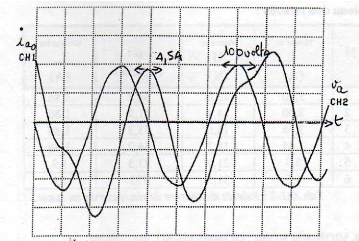
Fig.An1-3
La déformation de l'onde de courant qui apparait sous
tension réduite, est due aux à-coups de couples
(conséquence d'un entrefer qui n'est pas rigoureusement constant). En
augmentant la base de temps, on peut constater que ces à-coups de couple
apparaissent périodiquement toutes les 30ms soit toutes les
périodes et demi par rapport à la pulsation des grandeurs
statoriques.
Echelle :20ms/cm.
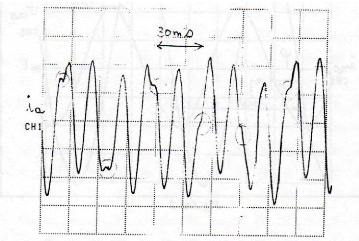
Fig.An1-4
- 125 -
| 

