Annexe 1: Essais expérimentaux et validation du
modèle.
3.2. Tableau des relevés : Moteur à vide en
fonctionnement moteur. n=46,8 tr/min (synchrone)= 50 Hz
Mesures
|
N°
|
Uab
(V)
|
Ia0
(A)
|
Ib0
(A)
|
P0
(W)
|
Q0
(var)
|
|
1
|
340
|
10,85
|
10,9
|
1 440
|
6 131
|
|
2
|
320
|
9,9
|
10
|
1 260
|
5 196
|
|
3
|
307
|
9,3
|
9,4
|
960
|
4 677
|
|
4
|
280
|
8,3
|
8,1
|
750
|
3 741
|
|
5
|
260
|
7,4
|
7,25
|
624
|
3 076
|
|
6
|
240
|
6,9
|
6,7
|
525
|
2 728
|
|
7
|
220
|
6,6
|
6,4
|
460
|
2 321
|
|
8
|
200
|
5,8
|
5,65
|
374
|
1 916
|
|
9
|
180
|
5,2
|
5,1
|
294
|
1 535
|
|
10
|
160
|
4,65
|
4,55
|
226
|
1 154
|
|
11
|
145
|
4,2
|
4,1
|
185
|
927
|
|
12
|
120
|
3,2
|
3,1
|
125
|
580
|
Calculs
|
tan (p
|
cos (p
|
Uab2
x103
|
PJ
(W)
|
Pméca
+
Pmag
(W)
|
Pmag
(W)
|
S0
|
Vas
(V)
|
|
2 2
?
( P 0 Q )
0
|
|
4,26
|
0,229
|
116
|
343
|
1 097
|
1 050
|
6 298
|
196,3
|
|
4,12
|
0,24
|
102,4
|
283
|
977
|
930
|
5 347
|
184,8
|
|
4,87
|
0,20
|
94,4
|
249
|
711
|
664
|
4 775
|
177
|
|
4,98
|
0,20
|
78,4
|
199
|
551
|
504
|
3 815
|
162
|
|
4,93
|
0,20
|
67,6
|
158
|
466
|
419
|
3 139
|
150
|
|
5,20
|
0,19
|
57,6
|
137
|
388
|
341
|
2 778
|
139
|
|
5,05
|
0,19
|
48,4
|
126
|
334
|
287
|
2 366
|
127
|
|
5,12
|
0,19
|
40,0
|
97,0
|
277
|
230
|
1 952
|
115
|
|
5,22
|
0,19
|
32,4
|
780
|
216
|
169
|
1 563
|
104
|
|
5,11
|
0,19
|
25,6
|
62,3
|
164
|
117
|
1 176
|
92,4
|
|
5,01
|
0,20
|
21,0
|
50,9
|
134
|
87
|
945
|
83,7
|
|
4,64
|
0,21
|
14,4
|
29,5
|
96
|
49
|
593
|
69,3
|
Tab.An1-3 Nota : P J = 3 R sI
02 avec R s = 961 m ? à 20°C
Pmag+ mé ca ? P 0 - P J
3.3. Tracé de la courbe : U P mag P
mé c
2 F-> +
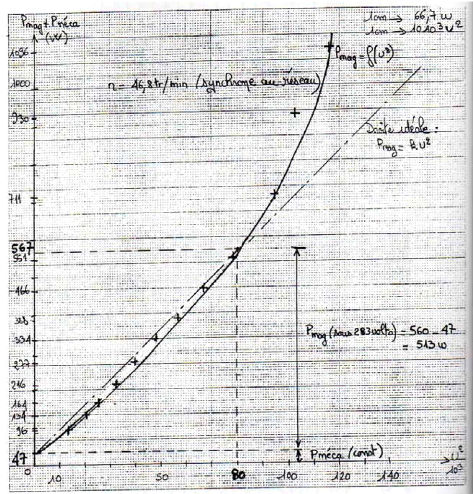
Fig.An1-5
4. ESSAI EN CHARGE EN FONCTIONNEMENT MOTEUR.
4.1. Essais à couples constants (Fonctionnement en
boucle ouverte) :
4.1.a) Tableaux des relevés ; Essai à
Tu = 100,6 N.m (Constant) ? Pu ? 0,48 kW
n=46,8 tr/min (synchrone)= 50 Hz
Mesures
|
N°
|
Uab
(V)
|
Vas
(V)
|
Ia
(A)
|
Ib
(A)
|
Pabs
(W)
|
Qabs
(var)
|
|
1
|
312,4
|
180
|
9,75
|
10
|
1 590
|
5 040
|
|
2
|
304
|
174,6
|
9,40
|
9,50
|
1 506
|
4 645
|
|
3
|
296
|
170
|
9,12
|
9,21
|
1 437
|
4 380
|
|
4
|
288
|
166
|
8,80
|
8,91
|
1 341
|
4 204
|
|
5
|
280
|
162
|
8,50
|
8,51
|
1 290
|
4 001
|
|
6
|
278
|
Décrochage du rotor
|
Calculs
|
(1)
cos q
|
(2)
PJ
3RsIb 2
(W)
|
(3)
Pmag
(W)
|
S
|
Pu
Tu(2in)
(W)
|
11
Pu/Pabs
(%)
|
PmajPabs
(%)
|
|
2 2
+
? P abs Q abs )
(VA)
|
|
0,30
|
339
|
760
|
5 285
|
493
|
31
|
48
|
|
0,31
|
306
|
667
|
4 883
|
493
|
33
|
44
|
|
0,31
|
288
|
640
|
4 610
|
493
|
34
|
45
|
|
0,30
|
269
|
587
|
4 413
|
493
|
37
|
44
|
|
0,31
|
245
|
486
|
4 204
|
493
|
38
|
38
|
|
Tab.An1-4
(1) : Cos q = Cos [Arc tan (Qabs /Pabs)]
(2) : A chaud, Rs = 1,13Q
(3) : D'aprés les essais à vide, on a k
=6,20.10-3 W/V2 pour une tension inférieure
à 283 volts.
4.1.b) Tracé des coubes : I b ?
Uab pour différentes valeurs de Tu
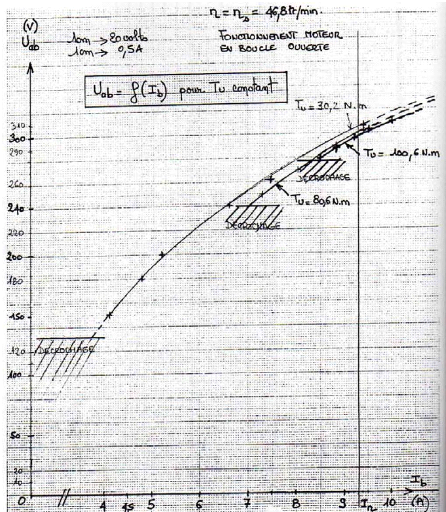
Fig.An1-6
4.2. Essais à tensions constantes (Fonctionnement
en boucle ouverte) :
4.2.a) Tableaux de relevés ; Essai à Uab =
300 volts (Constant) =0 ~Tu ~138 N.m
n=46,8 tr/min (synchrone)= 50 Hz Pmag = 667
W(constante)
Vas = 172 volts
Mesures
|
N°
|
Tu
(N.m)
|
Pu
(kW)
|
Ia
(A)
|
Ib
(A)
|
Pabs
(W)
|
Qabs
(var)
|
|
1
|
0
|
0
|
9,02
|
9,10
|
1
|
005
|
4
|
547
|
|
2
|
20,4
|
0,09
|
9,02
|
9,12
|
1
|
089
|
4
|
536
|
|
3
|
40,1
|
0,19
|
9,10
|
9,20
|
1
|
185
|
4
|
547
|
|
4
|
66,8
|
0,32
|
9,25
|
9,33
|
1
|
308
|
4
|
583
|
|
5
|
82,1
|
0,39
|
9,30
|
9,40
|
1
|
383
|
4
|
619
|
|
6
|
100,6
|
0,48
|
9,35
|
9,46
|
1
|
464
|
4
|
614
|
|
7
|
111
|
0,54
|
9,41
|
9,51
|
1
|
500
|
4
|
666
|
|
8
|
120
|
0,57
|
9,50
|
9,60
|
1
|
554
|
4
|
687
|
|
9
|
130,3
|
0,63
|
9,56
|
9,67
|
1
|
605
|
4
|
703
|
|
10
|
138
|
Décrochage du rotor
|
|
|
Calculs
|
(1)
cos q
|
(2)
PJ
3RsIb2
(W)
|
S
|
Pu
Tu(2in)
(W)
|
TI
Pu/Pabs
(%)
|
Pmag/Pabs
(%)
|
|
2
2 + (
( P abs Q abs )
(VA)
|
|
0,22
|
281
|
4 657
|
0
|
0
|
66,3
|
|
0,23
|
282
|
4 665
|
100
|
9,1
|
61,2
|
|
0,25
|
287
|
4 699
|
197
|
16,6
|
56,3
|
|
0,27
|
295
|
4 766
|
327
|
0,25
|
51,0
|
|
0,29
|
300
|
4 822
|
402
|
29,1
|
48,2
|
|
0,30
|
303
|
4 841
|
493
|
33,7
|
45,6
|
|
0,31
|
307
|
4 901
|
544
|
36,3
|
44,5
|
|
0,31
|
312
|
4938
|
588
|
37,8
|
42,9
|
|
0,32
|
310
|
4 969
|
639
|
39,8
|
41,6
|
|
Tab.An1-5
(1) : Cos q = Cos [Arc tan (Qabs /Pabs)]
(2) : A chaud, Rs = 1,13Q
4.2.b) Tableaux de relevés ; Essai à
Uab = 340 volts (Constant) =0 <_Tu <_138,5 N.m :
n=46,8 tr/min (synchrone)= 50 Hz Pmag = 717 W
(constante)
Vas = 196 volts
Mesures
|
N°
|
Tu
|
Pu
|
Ia
|
Ib
|
Pabs
|
Qabs
|
|
(N.m)
|
(kW)
|
(A)
|
(A)
|
(W)
|
(var)
|
|
1
|
104,6
|
0,50
|
11,25
|
11,3
|
1 890
|
6 287
|
|
2
|
138,5
|
0,64
|
11,3
|
11,32
|
1 995
|
6 365
|
|
3
|
|
Limite du banc d'essais
3
|
Calculs
|
(1)
cos cp
|
(2)
PJ
3RsIb2
(W)
|
S
|
Pu
Tu(27Cn)
(W)
|
n
Pu/Pabs
(%)
|
Pmag/Pabs
(%)
|
|
( P abs + Q2 abs) (
(VA)
|
|
0,29
|
433
|
6 565
|
513
|
27,1
|
37,9
|
|
0,29
|
434
|
6670
|
678
|
34,0
|
36,0
|
|
Tab.An1-6
(1) : Cos cp = Cos [Arc tan (Qabs /Pabs)]
(2) : A chaud, Rs = 1,13n
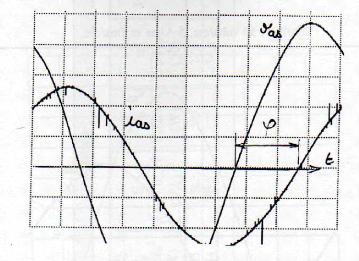
4.3. Relevé des oscillogrammes vas( t ) et i as (
t ) : moteur chargé : 4.3.a) T u = 40 ,1 N. m, U ab = 300 volts à
nn =46,8 tr/min (50 Hz) Echelles : 50 volts/cm, 5
A/cm et 2ms/cm
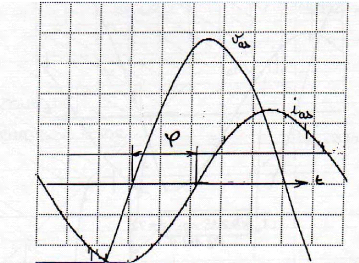
I as = 8 , 8 A p = - 77 ,1°
Fig.An1-7
Echelles : 50 volts/cm, 5 A/cm et
5ms/cm
Annexe 1: Essais expérimentaux et validation
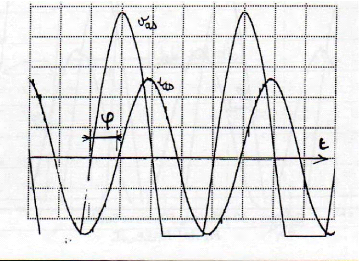
du modèle. 4.3.b) T u = 100 N. m, U ab = 300 volts à
nn =46,8 tr/min (50 Hz)
Echelles : 50 volts/cm, 5 A/cm et 2ms/cm
I as ? 9 , 2 A ? p =
72°
Fig.An1-9
Echelles : 50 volts/cm, 5 A/cm et 5ms/cm
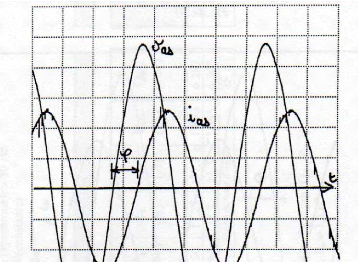
Fig.An1-10
Comparé au précédent relevé, on
remarque un déphasage, du courant statorique, amélioré de
5° environ. Le courant est resté toutefois très inductif.
Annexe 1: Essais expérimentaux et validation
du modèle. 4.3.c) Tracé des coubes : I b >
Tu pour différentes valeurs de U ab
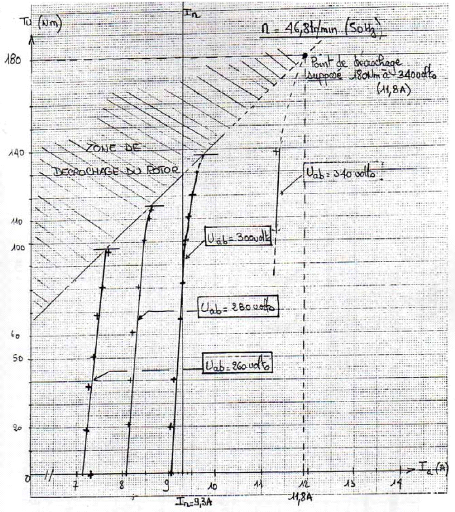
Fig.An1-11
5. DETERMINATION DE LA CONSTANTE THERMIQUE.
Sonde platine n°1
Stator n°1
Sonde platine n°2
Stator n°2



|
t
(min)
0
|
r'
(()
1,704
|
r
(n)
110,2
|
r-r' -3 0°
(°C)
|
r'
(n)
|
r
(n)
|
r-r' -3 0° t° Ambiant
(°C) à 1cm du moteur
(°C)
|
|
22
|
1,384
|
109,9
|
22
|
22,2
|
|
5
|
1,570
|
117,2
|
40
|
1,432
|
119,8
|
47,5
|
/
|
|
10
|
1,587
|
123,9
|
58
|
1,464
|
125
|
61
|
23,4
|
|
15
|
1,591
|
127,1
|
66
|
1,490
|
128,3
|
79
|
24,9
|
|
20
|
1,598
|
129,5
|
72
|
1,513
|
131,0
|
76
|
25,8
|
|
25
|
1,606
|
131,9
|
78,5
|
1,530
|
133,7
|
83,5
|
26,7
|
|
30
|
1,610
|
134,6
|
85
|
1,550
|
136,4
|
90,5
|
27,4
|
|
35
|
1,622
|
138,1
|
95
|
1,576
|
140,2
|
100
|
/
|
|
43
|
1,628
|
141,6
|
104
|
1,608
|
144,2
|
111
|
/
|
|
45
|
1,629
|
142,5
|
106
|
1,614
|
145,1
|
113
|
29,9
|
5.1. Tableau des relevés
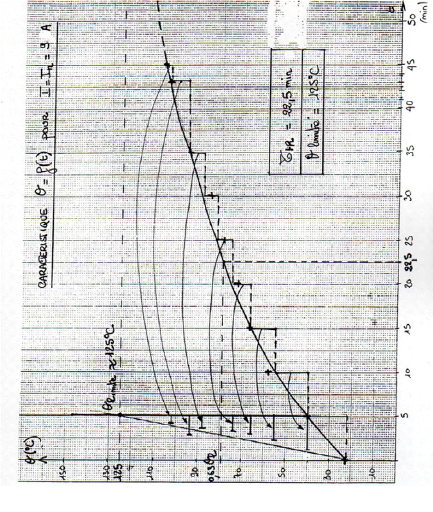
Fig.An1-12
5.2. Tracé de la courbe : t + 0 pour I I
n
- ANNEXE 2 -
COMMANDE SANS CAPTEUR MECANIQUE DU
MOTEUR FINTRONIC.
FILTRE DE KALMAN
QUELQUES NOTIONS SUR LES VARIABLES ALEATOIRES
Il nous semble important d'apporter quelques précisions
sur les signaux aléatoires pour comprendre le fonctionnement du filtre
de Kalman.
· L'espérance (moyenne arithmétique):
Nous allons définir l'espérance d'une variable
aléatoire à travers un exemple simple. Considérons n
relevés de mesure sur une variable aléatoire réelle
notée X, (x 1 , x 2 , x
3, . . ., xn) et effectuons la moyenne de ces
valeurs. On obtiendrait pour n
mesures finies :
une valeur moyenne : x
? ? lim
n n ?? n
x x
? ? ?
. . . x
1 2 n 1 ?

i =n
xi
i
=
1
Or, si on faisait plusieurs séries de mesures, avec
n relevés tendant vers l'infini, on verrait que
la valeur moyenne obtenue pour chaque série de mesures aurait tendance
à converger vers une valeur unique et non pas plusieurs valeurs
dépendants du nombre de relevés . Et c'est justement cette valeur
unique qui caractérise l'espérance de la variable
aléatoire X. L'espérance de X sera
notée :
1
E{ X} ou X avec E{ x(
t)} = lim ? x ? t ?
t =n
=

= Cste
(An2-1)
Nota : A noter que l'espérance des
bruits blancs, est nulle.
· La variance :
La variance correspond à l'espérance
mathématique du carré des écarts par rapport à la
valeur moyenne (espérance).
La variance de X sera notée :
?x ? E ? ? X ? X ? 2 ?
Avec
? ? ? ? ? ? ?
2 1 i n
? 2
?
x ? E X ? X
? lim ? x i ? X
?
n ?? n i
=1
|
2
|
(Carré de l'écart type).
|
|
(An2-2)
Plus clairement et en reprenant l'exemple
précédent, cette variance permet d'apprécier la dispersion
des valeurs mesurées par rapport à son espérance. C'est ce
qu'on appelle la variance de la variable aléatoire
X.
Nota:
L'écart type d'une variable aléatoire correspond
à la racine carrée de sa variance.
· Le coefficient de covariance :
le coefficient de covariance caractérise
l'interdépendance éventuelle entre 2 variables aléatoires
X et Y. Ce coefficient est défini et
noté par:
1 ?xy ? ? ? ? ? ?
? E X ? X Y ? Y ? lim ? ? ? ?
x i ? X y i ? Y
n ?? n ? i= 1
i n
?
(An2-3)
Cette valeur correspond à l'espérance de la
multiplication de l'écart type des 2 variables aléatoires.
Nota :
On pourra considérer par la suite que la notion
d'espérance, de variance et de covariance suffisent pour définir
une variable aléatoire.
· La matrice de variance-covariance :
Si un système différentiel quelconque est
tributaire de plusieurs variables aléatoires, il est possible de
représenter ces variables aléatoires, sous la forme d'un
vecteur.
Dès lors, il est possible de représenter la
variance et la covariance des différentes composantes de ce vecteur sous
la forme d'une matrice dite de « variance-covariance ».
Soit X
|
?
|
F
I
L
|
X
X
X
|
1
2
3
|
1 ?
I
J
|
: vecteur de 3 variables aléatoires,
|
|
(An2-4)
F I
[
C
xx
On a la matrice de variance-covariance suivante:
x 1 x
x 2 x
i
3 ?
3 ? ? ?
Dx 1 cx 1 x2 c
cx 2 x1 0x 2 g
cx 3 x1 cx 3 x2 0 x
3
(An2-5)
Si on remplace chaque terme par leur expression, on a :
??
Cxx = E
L
?
? ? ? ? ? ? ? ? ? ? ?
X X X X X X X X
? ? ? ? X X
?
? 2 2 1 1 3 3 2 2 3 3
-11
? ?
? ?
? ??
? ?

? ? ? ? ? ? ? ? ?
2
? X X
? X X X X
? ? X X X
?
1 1 1 1 2 2 1 1 3
? ? ? ? ?
? X 3 ?
? ? ? ? ? ? ? ? ? ?
2
X X X X X X X X X X
?
2 2 1 1 2 2 2 2 3 3
2
(An2-6))
De plus si on remplace ? ? Xi
X i ? X i par pour simplifier les
notations, on obtient
02
r
0
11 I 1 ? ?? ?
? ? ? ?
3
X1
0
o o
??? ?
?
?
E
?
1 ?
L
C xx = E
3
X2
r 1 1
? ? ? ?
0
2
r
? i ? ?
X3
r 1
?
1
[
L
? ? ? ? ?
X X X
?? 1 2 3
?? ?
? i
o o o o
X 1 X 1 X 2 X 1
X
0 2 0 0
X 2 X 1 X 2 X 2 X
0 0 0 0 0
X 3 X 1 X 3 X 2
X3
(An2-7)
Soit :
Matrice de variance-covariance du vecteur aléatoire :
gxx
|
f 0 0 T
= E iX X ???
|
|
(An2-8)
.
Nota : Dans le cas particulier des
bruits blancs, X = X.
- ANNEXE 3 -
COMMANDE SANS CAPTEUR MECANIQUE DU
MOTEUR FINTRONIC.
FILTRE DE KALMAN
CHANGEMENTS DE REPERE : (as,
bs,cs) ~~ (cts, 3sos) et (d, q, o)
~~ (cts, 3s, os)
TRANSFORMATIONS DE CLARKE ET DE CONCORDIA.
1. DETERMINATION DE LA MATRICE DE PASSAGE DU REPERE
(as, bs,cs) AU REPERE (as,
Os, os).
Afin d'eviter des calculs longs et fastidieux, il est essentiel
de tenir compte de la remarque suivante:
· Le referentiel (as, r3s,
os) correspond au referentiel de Park (d, q, o) pour lequel, on a
immobilise le système d'axes (d, q, o) et oriente l'axe as
suivant la même orientation que l'axe as.
On peut donc considerer que le referentiel (as,
(3s, os) est un cas particulier du referentiel de Park
avec lequel, on a remplace les lettres du système d'axes d, q par
as et ps. Il suffit donc de reprendre la matrice de Park
et de remplacer 0 par 0. On obtient ainsi, la nouvelle matrice de passage.
Dans la litterature courante, cette transformation est appelee
« transformation de
CLARKE ». La matrice de cette
transformee sera notee [ Cla] .


1
?
?
i
cose cos(0 -- 2 7c 3 ) cos(0 -- 4 7c 3)

--sine --sin(0 -- 2 7c 3 ) --sin(e -- 4 7c 3



1 2 1 2 1 2
(An3-1) : Matrice de PARK : Repère (d, q, o).
En remplaçant 0 par 0, on obtient :

1 -- 1 2 --1 2
2
0 3 2 -- 3
1 2 1 2 1 2
1 ?
?
? ?
r I
[
2
3
[ C la ] .
(An3-2): Matrice de CLARKE : Repère (as,
fis, os). Les expressions de tensions, courants et
flux deviennent :

i as = 1 3(
i ? s = 1 3
( i bs -- ics)
2i as -- i bs -- ics)
13
?
s
? ? ? ?? ?
i ? C i
?? o s la abc
? ? ? ?? ?
v ? C v
?? o s la abc
vas =1 3(
2v as --v bs --vcs)

v' s = 1 3
( v bs -- v cs )

13
?
s
? ? ? 1 3 ?
? s
? ? ? 1 3
? s
( Tbs --"cs)
[If alio s [ la abc
] = C IT ]


2Tas --Tbs
--Tcs)
?
s
(An3-3)
Nota :
On ne fait pas apparaître volontairement les expressions,
sur l'axe o. Cet axe intervient uniquement pour l'inversion de la matrice de
transformation (matrice carree).
L'unicité de la matrice de
transformation [ Cla] , pour les tensions, les
courants et les flux, nous oblige à tenir compte des
changements de variables, identiques à la transformation de Park.
3 Ilja s
i i
? ? v ? ? v ? ? ?
? s ? s ? s ? s ? s
3
2 2
s
i ' = i v' = v Ill' = Ill'
li
s
P
s
P
s 3
P
s
li

13
s
3
(An3-4)
2. DETERMINATION DE LA MATRICE DE PASSAGE DU REPERE (as,
Ps) AU REPERE (as, bs, cs).
Avec les mêmes arguments que précédemment,
on remplace 0 par 0, dans la matrice de Park inverse.
r
[
[P]-1. =
i
?
?
? ?

4
i
3 ) -- sin(9 --
4
7c
3
)
1
1
0
2 7c 3) -- sin(9 -- 2 7c 3 ) 1
(An3-5)
On remplace 0 par 0 et on obtient :
[
[Clar1 = --
--1 2 --
ii
L
1
1 0
1 2 3 2 1
3 2 1

(An3-6): Matrice de CLARKE inverse. Les expressions de
tensions, courants et flux deviennent :
i as --i as
--ias
i bs = Pbs = 1 2(
i cs = Pcs = 1
2(
i as + 3 ifts)
i as -- 3 ifts)
[i abo ]s =[C la
]-licoo]
s
v as =vas
US
v as = 3 2v
Us
? ? ? v 3 v ? ?
? s ? s
v as -- 3 vas)
? ? v 3 v ?
? s ? s
? v 3 v ?
? s ? s
?
v bs = 3 4(
v cs = 3 4(
[v abo ]s = [C la ]
1[vafid
v bs = 1 2(
v cs = 1 2(
s
s
?
illas = 3
2ijas
IPbs = 3 4(
IPcs = 3 4(


cos e -- sin
cos(9 --
cos(9 --
ljas + 31Pris)
? ?? 3 ? ?
? s ? s
? ?
? ?
as ? s
[Tabo ]s =[C la
]-1[Tcoo]
? ? ? ?
? 1 2 ? ? ? 3 ?
bs ? s ? ? s

? ? 1 2 ? ? ? ?
? 3 ? ? ?
cs ? s ? s
(An3-7)
3. REPRESENTATION VECTORIELLE DES SYSTEMES
D'AXES
Rs
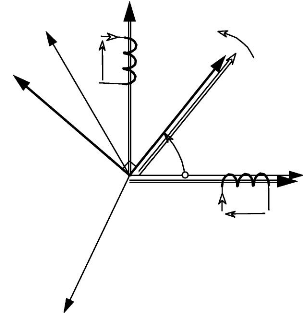
bs
i ?s
CO
Axe
du
rotor
d
q
vas
-->
IP aim
0 + 00
O
i as
vas
as
(Fixes)
as
cs
Fig.An3-1
s cos9
i i I
? ? ?
? s ? s
?
2
?
? ? arctan ?? ?
i ? s ?
? ?? ?
i ? ? s
V = 3v
OLs
? ? ? ?
i i
? ? ? ?
2 2 i i
2 2
s s s ?
? ? ? ? s
?
?
i i I
? ? ? ?
? ?
s s s
since
?
I s =
i?as
as
i?Ys
?
->
Vs
->
I s
vas
Rs
as
?
Cas particulier où v s = Vs
coscost
Fig.An3-2
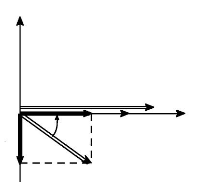
La représentation vectorielle de la figure 3.2 correspond
à un cas particulier oil la tension est colinéaire à l'axe
as à l'instant initial. Dans le cas général, on aurait
:
· v s = ? V
scos(wst + O s0)
s 0
= arcta --
?
· Non pas (p mais (p-Os0
avec cp -- ips
|
· Non pas
|
2 " 2 2 2
Vs = 3 v. 3 mais
Vs = (v + vPs) et Os 0 =
arcta
as
v
|
s,
|
?
s ??
s
|
Os0 : Position du vecteur "tension", par rapport
à l'axe as ou par rapport à l'axe as,
l'instant t=0.
En gardant 0 , comme l'angle
représenté par la position du rotor par rapport à l'axe
fixe as et par conséquent par rapport à l'axe
as, on peut représenter les projections du flux produit par
les aimants sur les axes as et r3s :
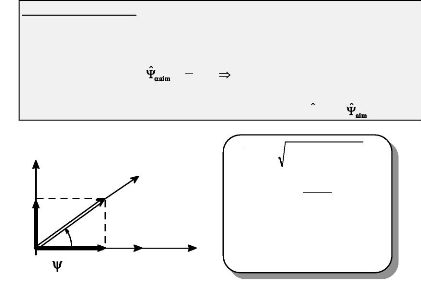
3,'
= 2 Taim
tetaim = 4aim
pour Ta'aim = D'après la nouvelle
notation, on a :
Vaaim =
Fig.An3-3
Rs
?
Taim
?
as
aaim
?
? ? arctan ??
waaim = Taim cos°
xvpaim = ''aim
sin°
? ?2 2
? ?
aim ? ?
? ?
aim
W?
Raim
??
? ? aim
d
--)
Waim
11aim
0
as
Remarque importante:
Transposé sur l'axe as, le flux
créé par les aimants (déterminé par un essai) doit
être normalement majoré du coefficient 3/2
(unicité de la matrice de Clarke). On aurait donc :
Etant donné que nous utilisions des valeurs non
primées, on fera de même
·
·
" coW]
[ Cla ][111abc .1 aim =111a4
sinOli
(An3-8)
Il faudra faire ATTENTION que dans tout ce qui suit,
nous utiliserons
des notations non primées pour simplifier les
écritures (Sauf indication
contraire).

Pour retrouver les vraies valeurs de flux et de tensions sur les
axes a et 13, il faudra multiplier chaque résultat par 3
2 (les résultats sur les courants restent identiques).
4. EQUATIONS ELECTRIQUES DANS LE REPERE (as, 13s,
os).
L'expression matricielle des tensions dans le repère
(as, bs, cs) correspond à :
? v ? R ? i ? d ? ?
? ? ?
abc s s abc s abc s
dt
(An3-9)
On multiplie chaque terme par la matrice de CLARKE et on remplace
? par
?abc ? s
|
[ Cla] ? o ? aim
?1 ???
|
. On obtient :
|
? v ? R ? i ? d ? ?
? ? ?
abc s s abc s abc s
dt
[ v ? R ? i ? ? C ? d ? ? ? ?
?1
? ? C la ? ?? ?
?? o s s ?? s la dt o s
|
? v ? R ? i ? d ? ?
?? ? ?? ? ? ??
o s s s dt o s
|
(An3-10)
Il faut exprimer les flux en fonction des courants. Pour cela,
nous utilisons la même démarche que précédemment, en
partant de l'expression des flux dans le repère (as,
bs, cs). [''abc] s ? s ?? abc ? s ? ? abc ?
aim
? L i ?
On multiplie chaque terme par la matrice de CLARKE et on remplace
l'expression des flux par celle de l'expression 3.1:
?1
? C la ? ? abc ? s ? C la ? ? L s ? ? i abc ? s ? C la ?
? abc ? aim
? ? ? ? . Sachant que ? i abc ? s ? C la
? ? i o ? s
? ??
On a : ['Ijapo ] s = [ C
la] [ L s ] [ C la ] 1 [i apo ] s #177;[Illapo ]aim
· Détermination de [ C la ] [
Ls] :

1 2(

1 ? ?
? ?
2
=
3
p
M M L
? 1 ? 1 2 ? 1 2 ?
? ?
0 3 2 ? 3 2
? ?
? ? 1 2 1 2 1 2 ? ?
3
2
[C la ][Ls]
=
L p M M
M L p M
1 2
=
3
0 3 2
1 2(
L
p -- M --1 2 (L p -- M) --1 2(L p -- M)
(L p -- M) -- 3 2(L p -- M)
L p + 2 M) 1 2 (L p + 2 M ) 1 2 (L
p + 2M)
1 ?
? ?
? ?
? ?
, ?
(An3-11)
· Détermination de [ C la ][ Ls]
[ Cla] -1:
[C la ][L s ][Cla]
(An3-12)
L p -- M --1 2 (L p -- M) --1 2(L p --
M)
1 ? ? ? J
0 3 2 (L p -- M) -- 3 2(L p -- M)
L p + 2 M) 1 2 (L p + 2 M ) 1 2
(L p + 2M)

1 --12 --121
?
0 3 2 -- 3 2 ?

1 2 1 2 1 2 ? ?
? 1
? ?? ? ? ?
C L C ? ? 0 ? ?
L M
?
la s la p
?
0 0
?

0
(L p + 2M)
L p -- M 0 0
? ?
f ?
s
? L 0 0 ?
0 L 0 ? s ?
? ? 0 0 L ?

1
?
?
?
J
=
Matrice que l'on notera ? L o ? s
??

?
r 1
[
1 ?
?
? ?
e
e
cos
sin
0
Taim
Ls
0 0
Lf
0 0
[ ja1 o ] s ? ?? o ? s ? ?? o ? s ? ? ?? o ? aim ? L i
?
Avec
0 L s 0
r 1
[
1 ?
?
? ?
Llio]
[a=
et [T' ] = alio
aim
(An3-13)
On dérive l'expression précédente pour
obtenir :
d? ? ? ? ? ?
d
? ? L i o
?? ??
dt o s o s dt ??
?
+ maim
s
r
[
cos
0
? ?
? ?
aim
?
?
sin
(An3-14)
On rappelle que 0 = wt dO = co dt
On remplace l'expression de la dérivée du flux dans
l'expression (4.1) pour obtenir l'expression finale des tensions :
?
? v ? R ? i ? ? L ? d ? ?
? ? i o s ?
?
?? o s s ?? ??
s o s dt ?? aim
Soit
v as = R s i ss +
Ls
AN
cotPaim sine
di a s
dt
v 0 s = R s i Ds +
Ls
v os = R s i os +
Lf
AN
+ cotPaim cose
di 0 s
dt
di os
dt
(Attention aux valeurs primées)
r 1
[
sin
cos
0
0
0
1 ?
?
? ?
aim
(An3-15)
Sous une autre forme, on obtient un système de 2
équations différentielles linéaires à coefficients
constants aux 1ers membres et avec les seconds, variables en fonction du
temps:
?
(4.5) :
di
0
? aim
? sin ?
L L
s
?
Taim
0) cos0
L s L
di
R
dt
L s
R
dt
L s
? s
v
Qs s Qs
#177; i = #177; #177;
Qs
s
v
s s ? s
? i ? ?
s
(An3-16) (Attention aux valeurs primées)
5. DETERMINATION DE LA MATRICE DE PASSAGE DU REPERE (d,
q, o) AU REPERE (as, (s,os).
En reprenant la figure 3.1, on remarque que l'on peut passer
d'un système d'axes (d, q) au système d'axes (cs,
Js) très facilement. La matrice de cette transformée
que l'on appelle « matrice de CONCORDIA »
et notée [ C 0] , correspond à :
|
[ C o ] .
|
r
[
|
cose -- sin ? 0 ?
?
sin cos
? ? 0 ?
0 0 1 ? _I
|
(An3-17) : Matrice de CONCORDIA :
Repère (as, fis, os).
En inversant cette matrice, on obtient :
[C o]-1. --
r 1
cose sine
sin e cose
0 0
0ll
0 ?
?_I
1
(An3-18):Matrice inverse de CONCORDIA :
Repère (as, ?s, os).
On remarque que cette matrice inverse correspond à la
transposé de la matrice de
Concordia : ? ?
C o ? C
? ? t
1 ? . Il y a donc conservation de la puissance
instantanée et de
ol'amplitude des grandeurs
vectorielles.
On obtient ainsi :
i ds = ids cose -- i qs
i 13s = ids sin e + iqs
Nota :Expressions valables aussi pour les
tensions et les flux
sine cose
?
i ds = ias cos ° +
ips
i qs = -- i ns sin e + iPs
sine
cose
(An3-19)
6. EXPRESSION DU COUPLE ELECTROMAGNETIQUE DANS LE REPERE
(as, (s,os).
En reprenant l'expression du couple
électromagnétique dans Park, nous avions :
1aim
3
Tem = KT iqs avec
K T = 2 Np
Or, en remplaçant iqs par son
expression en (An3-19), on obtient une nouvelle expression du couple
électromagnétique :
Tem = K T ( i p s cos e --
ies sine)
avec
3
KT= 2 Np
...taim
(An3-20)
7. EQUATION MECANIQUE DANS LE REPERE (as, (3s,
os).
T em ( Trm a #177; T r f #177; T r 0
)
?
? N J J
( m ? r )
??
p
dco 1
dt I]
1
Avec
T r f = f co
T r0 = Cste

T rma = k co2 ou k co3 ou k co ou
Cste
(An3-21)
En remplaçant Tem par son
expression, on obtient :
?
K ? i i ? f ? T T ? N J J d
1
? ? ? ? ? ? ?
? ? ? ? ? ( ? )
T s cos s sin rma r 0 ?? m r dt ??
p
soit
Attention : f est en rad/s-1
électrique
[K T (i ps cos 9 -- i
es sin e) -- f o)-- T rma -- Tr0]
J m + J

dco
?
dt
N p
(An3-22)
- ANNEXE 4 -
COMMANDE SANS CAPTEUR MECANIQUE DU
MOTEUR FINTRONIC.
FILTRE DE KALMAN
Schéma général sous Simulink : commande du
moteur avec filtre de Kalman (fichier "bfesmli.m").
Schéma-blocs sous Simulink et masque de S-Function du
filtre.
Fichier metafile : bfesmlim.m.
Fichier metafile :
Filtre1m.m.
Annexe 4 : Commande sans capteur mécanique -
Filtre de Kalman - Mémoire CNAM Patrick BOIDIN. Fichier :
bfesmli1.m
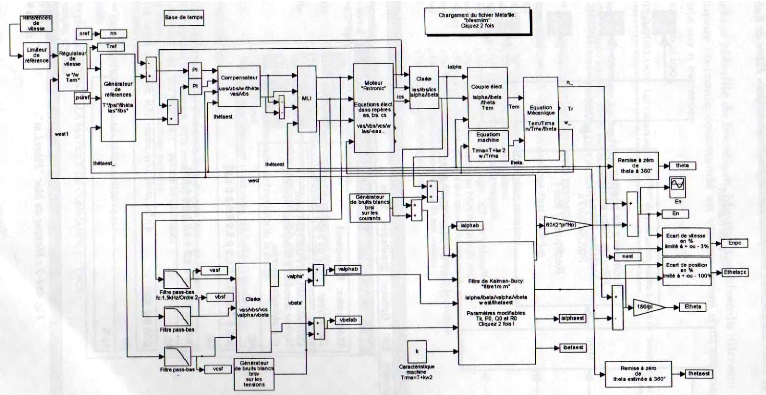
Fig.An4-1 : Schéma général de la
commande sous Matlab-Simulink.
Filtre de Kalman
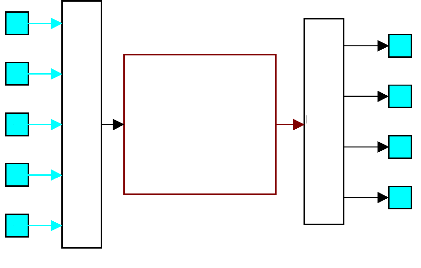
1
west
2
ibeta
thetaest
3
ialphaest
4
ibetaest
Mux
Demux
ialpha
valpha
vbeta
5
k
1
2
3
4
Fig.An4-2 : Bloc "filtre de Kalman".
Estimateur de position: Filtre de Kalman-Bucy
Metafile: "filtre1m"
P0/Q0/R0/Tk
Recliquez 2 fois !
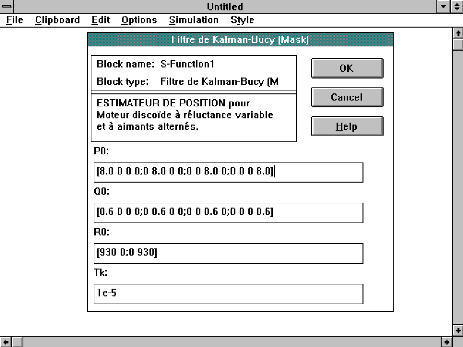
Fig.An4-3 : Masque du bloc "Filtre1.m".
- 152 -
%Fichier Métafile de boesti5.m, bfesti5.m et bfesmli1
:filtre1m %Moteur Fintronic commandé en vitesse, muni d'un estimateur et
régulé sur n estimée
%20:23 16.11.1995
%
%NOTE IMPORTANTE: Les valeurs suivies de "**" doivent
correspondre à ceux de "boesti5.m" et autres
%***********************************************************
%%
function[sys,X0]=filtre1m(t,X,u,flag,P0,Q0,R0,Tk);
%P0=700 / Q0=6 / R0=500 / Tk=30 microseconde
%********************* FILTRE DE KALMAN ********************
%
%**** DECLARATION DES CONSTANTES ESTIMEES:
%
Ld=0.0537 ;%**(mH) - Inductance synchrone d'axe
d (Ld=Ls)
Ls=Ld ;
Rs=1.13 ; %**Ohms - Résistance d'une
phase statorique
phiaim=0.141 ; %**Wb - Flux créé
par les aimants
f=0.0306 ; %**N.m/rad.s-1 - Frottements
visqueux
KT=13.536 ; %**N.m/A - Constante de couple :
KT=3/2*phiaim*Np
Np=64 ; %**Nombre de pas, assimilé au
Nbre de paire de pôles
Jm=0.141 ; %**kg.m2 - Moment d'inertie des
masses tournantes du moteur
Jr=0.1 ; %**kg.m2 - Moment d'inertie des masses
tournantes de la machine
Tr0=3 ; %**N.m - Couple résistant
résiduel dû aux aimants
T=0 ; %**N.m - Couple résistant à
n=0
%
J=Jm+Jr ; %kg.m2 - Moment d'inertie total:
Moteur/machine
%
pL=phiaim/Ld ; %Simplification des notations
RL=Rs/Ld ; %Simplification des notations
KJ=KT*Np/J ; %Simplification des notations
%
Q=Q0 ; %Matrice de variance-covariance
représentatif des
%bruits sur le système v (coefficients de la diagonale)
R=R0 ; %Matrice de variance-covariance
représentatif des
%bruits sur les mesures w (coefficients de la diagonale)
%
% k ;%Constante représentative de l'évolution de la
charge
;%Trma=T+kw2
% Tk ;%Pas d'échantillonnage: 10 micro
sec.(déclaré dans simulink)
%
%**** NOTATIONS :
%
% X(1): dialphaest/dt, X(2): dibetaest/dt, X(3): dwest/dt, X(4):
dthétaest/dt
% X(5): ialphaest, X(6): ibetaest, X(7): west, X(8):
thétaest
% F: matrice des dérivées partielles, C: matrice de
commande
% Fd: matrice de transition des dérivées
partielles
% u(1): ialpha, u(2): ibeta, u(3): valpha, u(4): vbeta, u(5):
k
% Y: Matrice de sortie;
%
%**** DECLARATION DE LA MATRICE UNITE (4,4) :
I=eye(4);
%
%**** DECLARATION DE LA MATRICE DE COMMANDE C : Y=CX :
%y1=ialpha, y2=ibeta
%
C=[1 0 0 0
0 1 0 0];
if flag==2
n=t/Tk;
m=floor(n+1e-13*(1+n));
if abs(round(m-n))<1e-8
%
%**** EVOLUTION DE f(x)- VARIABLES D'ETATS ESTIMEES
X(5),X(6),X(7),X(8) :
%Méthode d'Euler
%
% Variation de ialpha estimé X(5): X(1);
X(1)=X(5)+Tk*(-RL*X(5)+pL*X(7)*sin(X(8))+u(3)/Ls);
%
% Variation de ibeta estimé X(6): X(2);
X(2)=X(6)+Tk*(-RL*X(6)-pL*X(7)*cos(X(8))+u(4)/Ls);
%
% Variation de w estimée X(7): X(3);
xm3=KJ*X(6)*cos(X(8))-KJ*X(5)*sin(X(8))-Np/J*f*X(7)-Np/J*(Tr0+T)*sign(X(7))-
Np/J*u(5)*X(7)*abs(X(7));
X(3)=X(7)+Tk*xm3;
%
% Variation de théta estimée X(8): X(4);
X(4)=X(8)+Tk*(X(3)+X(7))/2;
%
%**** PREMIERE ESTIMATION DU VECTEUR D'ETAT (avant les mesures et
correction):
% XM=Xest(k/k-1)
% XM=[X(1)
X(2)
X(3)
X(4)];
%
%**** MISE EN MEMOIRE DE LA MATRICE DE VARIANCE COVARIANCE DE
L'ERREUR
% SUR LA DEUXIEME ESTIMATION PP=P(k/k):
%
PP=[X(9) X(10) X(11) X(12)
|
X(13)
|
X(14)
|
X(15)
|
X(16)
|
|
X(17)
|
X(18)
|
X(19)
|
X(20)
|
|
X(21)
|
X(22)
|
X(23)
|
X(24)];
|
%
%**** CALCUL DE LA MATRICE DES DERIVEES PARTIELLES DE f(x), F(x):
%
F(1,1:4)=[-RL 0 pL*sin(X(8))
pL*X(7)*cos(X(8))];
F(2,1:4)=[0 -RL -pL*cos(X(8))
pL*X(7)*sin(X(8))];
F(3,1:3)=[-KJ*sin(X(8))
KJ*cos(X(8))-Np/J*f-2*Np/J*u(5)*abs(X(7))];
F(3,4)=[-KJ*X(5)*cos(X(8))-KJ*X(6)*sin(X(8))];
F(4,1:4)=[0 0 1 0];
%**** CALCUL DE LA MATRICE DE TRANSITION Fd(x) de F(x)
% par la méthode du développement limité:
I+FT+(FT)2/2!+... :
% Fd=I+Tk*F;
%
%**** DISCRETISATION DE LA MATRICE DE VARIAN. COV. Q
% par la méthode des trapèzes :
% Qd=(Fd*Q*Fd'+Q)*Tk/2;
%
%**** DETERMINATION DE LA MATRICE DE VARIANCE COVARIANCE DE
L'ERREUR
% SUR LA PREMIERE ESTIMATION PM=P(k/k-1) :
% PM=Fd*PP*Fd'+Qd;
%**** CALCUL DE LA MATRICE DE KALMAN K (correction) :
%
K=PM*C'*inv(C*PM*C'+R);
%
%**** MESURE DES COURANTS REELS ialpha ET ibeta POUR COMPARAISON
:
%
Y=[u(1);u(2)];
%
%**** CORRECTION DE L'ESTIMATION DU VECTEUR D'ETAT ESTIME APRES
MESURES:
% XP=Xest(k/k) et XM=Xest(k/k-1)
% XP=XM+K*(Y-C*XM);
%
%**** DETERMINATION DE LA MATRICE DE VAR. COVAR. DE L'ERREUR
% SUR LA DEUXIEME ESTIMATION PP=P(k/k):
% PP=(I-K*C)*PM*(I-K*C)'+K*R*K';
% ou
%PP=PM-(K*C*PM)
%
%**** MISE EN MEMOIRE DE XP=Xest(k/k) et PP=P(k/k)
X(5)=XP(1);
X(6)=XP(2);
X(7)=XP(3);
X(8)=XP(4);
X(9:24)=[PP(1,1:4)';PP(2,1:4)';PP(3,1:4)';PP(4,1:4)'];
sys=X;
else
sys=X;
end
%
%**** RETOUR AU VARIABLES DE SORTIE west et thétaest
% + ialphaest ET ibetaest :
%
elseif flag==3
sys=[X(7);X(8);X(5);X(6)];
%
%**** RETOUR AUX CONDITIONS INITIALES :
%
elseif flag==0
%
%**** DECLARATION DU NOMBRE DE PARAMETRE A TRAITER :
%
sys=[0,24,4,5,0,0];
%
%**** DECLARATION DES CONDITIONS INITIALES
% dialpha0, dibeta0, dw0, dthéta0, ialpha0, ibeta0, w0,
théta0 :
%
X0(1:8)=[0;0;0;0;0;0;0;0]; %**
%P0=P(0/0)
X0(9:24)=[P0(1,1:4)';P0(2,1:4)';P0(3,1:4)';P0(4,1:4)'];
%
else sys=[];
end
%*********** Fichier Métafile de bfesmli1.m
******************
%Moteur Fintronic commandé en boucle fermée dans le
repère as, bs, cs
%Filtre de Kalman (filtre1m.m) fonctionnant en paralléle
%Régulation de vitesse, avec onduleur, avec nest et thetaest %Machine:
Tr=T+kw2
%18:17 13/10/1995
%NOTE IMPORTANTE: Les valeurs suivies de "**" doivent
correspondre à ceux de "filtrem.m" %PARAMETRES DE SORTIE GRAPHIQUE ET DE
SIMULATION:
%********** Méthode : EULER ***************
STT =0.0 ; %s - Start Time
ST =0.08 ; %s - Stop Time
MISS=2*1e-4 ; % - Min Step Size
MASS=2*1e-4 ; % - Max Setp Size
TOL =1e-4 ; % - Tolérance
bt=10000 ; %Base de temps de l'horloge
p1=10000 ; %Nbre de points (sortie graphique)
%
%MODULATEUR MLI:
e=0 ; % Entrée des relais, changement
d'état
U=810 ; %volts - u/2 : Valeur maxi de la
modulante
son=U/2 ; % Sortie relais (Amplitude de
l'impulsion)
soff=-U/2 ;
%Up=410 ; %volts - Valeur crête de la porteuse
%f=2400 ; %Hz soit un rapport des fréquences m=39
%Remarque: La dent de scie est réalisée par un bloc
fonction pré-défini par Simulink%
%
%PARAMETRES DU MOTEUR A RELUCTANCE VARIABLE ET A AIMANTS ALTERNES
"FINTRONIC":
%In=9,3A / Imax=13A / n(nominale)= 60tr/min / Tn=200N.m /
fn=64Hz/ Vn=220volts
Ld=0.0537 ; %**(mH) - Inductance synchrone d'axe
d (Ld=Ls)
Rs=1.13 ; %**Ohms - Résistance d'une
phase statorique
phiaim=0.141 ; %**Wb - Flux créé
par les aimants
f=0.0306 ; %**N.m/rad.s-1(élec) -
Frottements visqueux
KT=13.536 ; %**N.m/A - Constante de couple:
KT=3/2*Np*phiaim
Np=64 ; %**Nombre de pas du moteur
Jm=0.141 ; %**kg.m2 - Moment d'inertie du
moteur
%
%PARAMETRES MACHINE:
Jr=1.2 ; %**kg.m2 - Moment d'inertie de la
machine entrainée
Tr0=3 ; %**N.m - Couple statique du aux
aimants
T=0 ; %**N.m - Couple résistant
J=Jr+Jm ; %kg.m2 - Moment d'inertie de
l'ensemble
%
% PARAMETRES DES CONDITIONS DE FONCTIONNEMENT
Tmax=130 ; %N.m pour
nref=60 ; %tr/min
wref=2*pi*Np*nref/60; k=(Tmax-T)/wref/wref;
%
theta0=0*pi/180 ; %degré;
%Vmin=-600 ; %volts - Limitation de la
tension
%Vmax= 600 ; %volts - Limitation de la
tension
psiref=0*pi/180 ; %Degré - Couple maxi
pour psi=0;
%
tec1=0 ; %s - A-coups de couple machine;
ec1 =0 ; %N.m - A-coups de couple machine;
%---- Régulateur de courant
kp=150 ; %Gain des correcteurs
ki=80 ; %Coef d'intégration des
correcteurs
%
%---- Régulateur de vitesse
kvp=20 ; %Gain des correcteurs;
kvi=80 ; %Coefficient d'intégration;
Lmin=-300 ; %N.m
Lmax=300 ; %N.m
tnref=0.00 ; % s - Limitation de la
référence de vitesse
tev1=0.04 ; % - A-coups de vitesse n°1 (s /
tr/min)
ev1=0 ; % - A-coups de vitesse n°2
tev2=0 ;
ev2=0 ;
tev3=0 ; % - A-coups de vitesse n°3
ev3=0 ;
%
% Génération des bruits blancs
brsi=1/3 ; %x3 maxi A - bruits de mesures sur
les courants
brsv=0.2 ; %x3 maxi volts - bruits de mesures
sur les tensions
%
%Bruits sur le système:
brdias=140 ; %x3 maxi A - bruits sur la
variation de ias
brdibs=150 ; %x3 maxi A - bruits sur la
variation de ias
brdics=160 ; %x3 maxi A - bruits sur la
variation de ias
brdw=20 ; %x3 maxi rad/s - bruits sur la
variation de w
brdt=20 ; %x3 maxi ° - bruits sur la
variation de théta
%
%Filtrage des tensions vas, vbs et vcs par filtres pass-bass:
%fc=1500 ;%Hz - Fréquence de coupure
%ordre=2 ;% - Ordre
%
%CONDITIONS INITIALES:**
ias0=0 ;ibs0=0 ;ics0=0; w0=0 ;kvi0=0 ;ki0=0;
%
%Grandeurs de sortie (plot):
%nn / n / nref / En / Enpc / nest / vas / vbs / vcs
%valpha / vbeta / valphab / valphaest / Vs / eas
%Enthetapc / theta / thetaest / Etheta
%ias / ialpha / ibeta /Is / ialphab (bruité) / ialphaest /
ibetaest
%Tref / Trma / Tem / Tr
%ds (porteuse) / vasreg / vbsreg / vcsreg / vasf (filtré)
/ vbsf / vcsf
%vasmli / vbsmli / vcsmli / sr1 / sr2 / sr3
QUELQUES PHOTOS
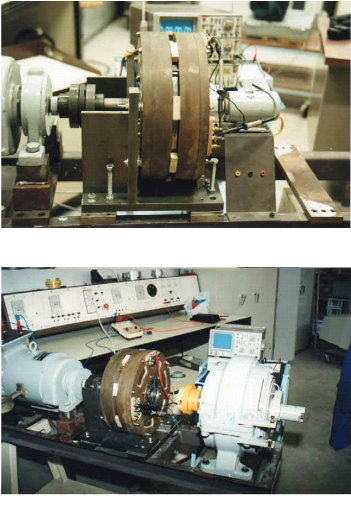
Photo 1
Photo 2
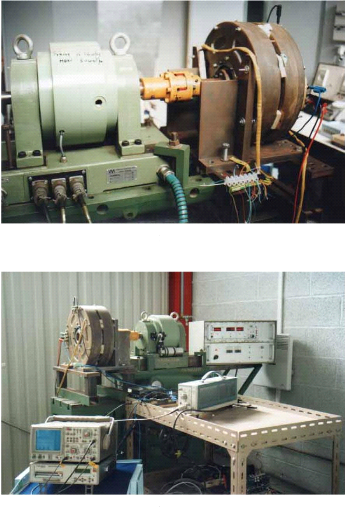
Photo 3
Photo 4
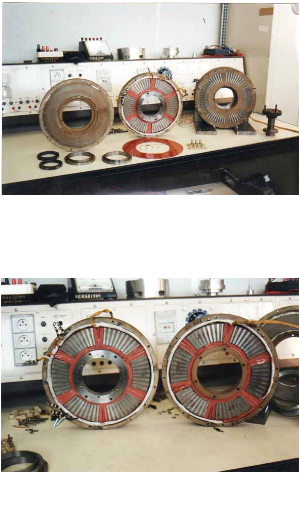
Photo 5
Photo 6
- 161 -

Photo 7
Photo 8
Photo 9
| 
