Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
· Le moteur a besoin d'une commande en M.L.I pour
limiter au mieux les harmoniques de courants et surtout les à-coups de
couple. Les moyens en informatique, à notre disposition, ne permettent
pas d'utiliser une M.L.I à une fréquence plus
élevée que celle utilisée de 2,4 khz. Compte tenu des bons
résultats obtenus, on peut s'imaginer que les résultats seraient
bien meilleurs à des fréquences supérieures.
· La remarque précédente nous motive
à écarter la solution du contrôle des courants par
"hystérésis". En effet, cette méthode ne permet
pas de contrôler suffisamment bien les harmoniques de courant, pour
favoriser son emploi.
· Qu'elle que soit la position initiale du rotor,
imposée avant chaque démarrage, le comportement du moteur n'a pas
varié.
· Muni d'un découpleur linéarisant, le
moteur discoïde et sa commande deviennent assimilables à un moteur
à courant continu. L'inconvénient principal de ce
découpleur réside dans l'estimation de la valeur numérique
des paramètres du moteur. En supposant que ces paramètres
évoluent en fonction des données tel que la température ou
autres, il faudra réajuster les valeurs en conséquence. Cette
condition impose de bien connaître les caractéristiques
électriques du moteur considéré ou d'intégrer dans
la commande du moteur des opérations de mesures des paramètres
électriques.
· Le moteur a besoin d'être régulé
avec beaucoup de souplesse pour des fonctionnements dont le couple
résistant est faible. En effet, si les paramètres des correcteurs
optimisent les fonctionnements à fortes charges, le moteur aura tendance
à pomper en dépensant inutilement de l'énergie sous forme
de pertes magnétiques aux faibles charges. Dans cette situation, on
devra adapter les paramètres des correcteurs au cas de fonctionnement
donné. On appelle cette commande,
Commande adaptative.
En conclusion, la commande vectorielle s'adapte assez bien
au moteur FINTRONIC, à condition de connaître à chaque
instant, la position du rotor. La structure de cette commande est simple
à élaborer, comparée à celle d'une commande
vectorielle de machine asynchrone. Néanmoins et sans pouvoir le
démontrer dans ce mémoire, le moteur perd très vite ses
performances, à des vitesses supérieures au nominal. Une
étude est nécessaire pour ce cas de fonctionnement.
CHAPITRE 4
COMMANDE SANS CAPTEUR
MECANIQUE DU MOTEUR
FINTRONIC
ET
FILTRE DE KALMAN
1. INTRODUCTION.
Dans cette partie d'étude, on défini une
commande sans capteur mécanique du moteur FINTRONIC. Cette
commande est testée par une série de simulations sous
MATLABSIMULINK dont on présente les résultats. Le chapitre
précédent nous a montré que le capteur de position et de
vitesse était indispensable à la fonction d'autopilotage et
à la régulation de vitesse. Or, les difficultés
rencontrées pour définir le capteur standard et compatible avec
le prototype, nous conduit à étudier un moyen technique de
substitution. Pour cela, on utilise un algorithme de
contrôle-commande du type :
filtre de Kalman.
2. LE CAPTEUR DE POSITION. 2.1. Le capteur et son
rôle :
Le capteur mécanique que nous proposons de
définir avant de le remplacer, doit détecter la position
angulaire du rotor par rapport à un repère fixe du moteur. On
rappelle que le rotor est soumis à une fréquence de rotation
nominale de 60 tr/min pour une fréquence électrique de 64Hz.
2.2. Résolution du capteur :
Le nombre de pas du moteur est de 64. Cela signifie que pour 1
tour mécanique du rotor, le champ statorique a fait 64 tours
électriques. En imposant un pas de mesure de 1 degré
électrique (1pt/°) qui correspond à une précision de
60'(minutes) et 360 pts sur le tour électrique, il faudrait une
résolution de 23 040 points de mesure par tour mécanique (64x360)
pour assurer le fonctionnement correct du moteur.
5,625° méca. 360°
méca.
1 tour électrique 64 tours
électriques
1 tour mécanique
0
9mec
360° élec.
1pt/° élec.
360pts
360x64= 23 040pts
Fig.IV-2.1
Or, le traitement des informations du capteur doit
nécessairement se faire sur 15 bits au minimum (215=32 768
pts).
2.3. Choix du type de capteur :
Il est possible de choisir parmi l'une de ces 3 catégories
de capteurs "standard":
1. Le capteur de position angulaire du type codeur rotatif
incrémental : La position angulaire est définie par un
nombre d'impulsions sur le tour mécanique.
2. Le capteur de position angulaire du type codeur rotatif
absolu : La position angulaire est définie par un mot binaire de x
bits dans le tour absolu.
3. Le capteur de position angulaire de type
résolveur : La position angulaire est fournie par 2 signaux
analogiques (en cosinus et en sinus), porteurs de l'information de position. Un
traitement du signal est nécessaire pour ce type de capteurs.
2.4. Le codeur rotatif incrémental :
Les plages de résolutions les plus courantes,
proposées par les fournisseurs, sont comprises entre 50 et 10 0000
points par tour mécanique. Au-delà de 5 000 pts, le capteur
devient sophistiqué et coûteux. Le principal inconvénient
de ce capteur est de fournir une position relative par rapport à
un point de référence "Top 0" qui se situe dans le tour
mécanique. Tant que ce "Top 0" n'est pas sollicité, le moteur est
commandé de façon aléatoire. Or, cette phase transitoire
est d'autant plus longue que le nombre de paires de pôles du moteur est
grand. Dans notre cas, cette phase peut durer prés d'une seconde (60
tr/min. = 1 tr/s). Evidemment, Cet inconvénient n'est pas
tolérable pour une commande performante du moteur FINTRONIC.
2.5. Le codeur rotatif absolu :
Ce type de capteurs est proposé avec une
résolution maximale et courante de 4 096 pts/tour mécanique ;
C'est un codeur à 12 bits. Au-delà de cette résolution, le
prix du capeur devient injustifié pour des projets comme le notre. En
exemple, on peut citer HEIDENHAIN qui propose des capteurs 15 bits (32 768
pts/tour) pour un montant H.T. de 8 000 francs, l'unité. Ce
matériel est aussi cher que le variateur de vitesse, lui-même. De
plus, les informations doivent être traitées non plus sur 12 bits
mais sur 16 bits. Par contre, le codeur absolu supprime l'inconvénient
du cas précédent : L'autopilotage du moteur peut se faire
instantanément sans phase d'incertitude et la position angulaire du
rotor est déterminée dans le tour absolu.
2.6. Le résolveur :
Le résolveur est un capteur
électromagnétique qui a l'avantage d'être dépourvu
de toute électronique embarquée. Par sa constitution et par sa
construction, il s'apparente fortement à un moteur synchrone dont on a
mis en quadrature, deux phases statoriques. L'inducteur est alimenté par
une tension alternative soumise à une fréquence maximale de
10kHz. On retrouve le principe du résolveur à travers cette
figure :
vs1
Signal de sortie
capteur
Partie fixe
solidaire du bati
moteur
Axe en rotation
Stator
Rotor
°mé c
Axe fixe de référence
vs2
Signal de sortie
capteur
Partie mobile
reliée mécaniquement
au rotor
du moteur
V e ( 10kHz)
Signal d' entrée
Fig.IV-2.2 : Capteur de position type
"Résolveur".
L'amplitude des tensions de sorties de ce capteur varie en
fonction de la position du rotor. La modulation de ces amplitudes permet de
déterminer la position du rotor par rapport à un axe de
référence du résolveur. La fréquence de la
modulatrice permet d'obtenir la fréquence de rotation du moteur tandis
que la fréquence de la tension d'entrée, donne la
résolution. Elle correspond à 10000 50
variations pour 3 000
tr/min, soit 200 pts par tour mécanique. On peut atteindre
5 000 pts/tour mécanique en ajoutant au dispositif, un module
électronique dit "de positionnement".
L'inconvénient principal de ce capteur est de fournir une
mauvaise précision de la mesure aux basses vitesses.
En préliminaire, on constate que les capteurs
proposés ne conviennent pas tout à fait au prototype : La
résolution de 4 096 pts/tour n'est pas suffisante comparée aux 23
040 pts/tour recherchés. Néanmoins, une solution consisterait
à augmenter le rapport des vitesses en interposant entre le moteur et le
capteur, un train d'engrenages.
Train d'engrenages
R=4
Codeur
12bits
MS
3
Aimants P.
4 tours mécaniques
1 tour mécanique
1,41°/pts
Fig.IV-2.3 : Capteur de position avec train
d'engrenages.
2.7. Conclusion :
Pour installer un capteur de position sur le prototype, il
faut un codeur rotatif absolu à 12 bits (- 4 000 francs.) mais sans son
train d'engrenages. En effet, ce dispositif augmente la résolution du
capteur mais augmente aussi sa sensibilité face aux imperfections du
train d'engrenages (jeux) et aux vibrations mécaniques parasites du
moteur. La solution sans engrenage permet de filtrer naturellement la mesure de
la position qui est détectable à environ #177; 3° de l'angle
électrique. Cette solution s'oppose, néanmoins, à une
commande optimale.
3. RECONSTRUCTION DE LA POSITION DU ROTOR AU MOYEN DU
RECONSTRUCTEUR D'ETAT.
3.1. Le reconstructeur et son principe, appliqués
aux systèmes linéaires :
Un reconstructeur d'états [13][14]
est un dispositif capable d'estimer une ou des grandeurs
d'états non mesurables d'un système, à partir des
grandeurs mesurables dites observables. Cette définition fait
apparaître la notion d'estimation. Le problème essentiel
d'une valeur estimée est de pouvoir juger son degré de
fiabilité. Pour cela, on se sert d'une autre grandeur du système
qui est estimable et mesurable pour corriger les estimations des
grandeurs non mesurables à travers des gains de correction.
Un reconstructeur d'états est donc un
estimateur à la fois correcteur des variables
d'états. On schématise le principe par le schéma suivant
:
Réseau

Cde
MS
3
Grandeurs
mesurables
Grandeurs
estimées
Reconstructeur
Estimation
+
Correction de l'erreur
Fig.IV-3.1 : Principe du reconstructeur.
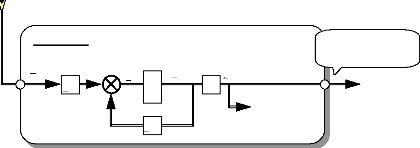
L'idée du reconstructeur consiste à
reconstruire l'ensemble des variables d'état du
moteur
contenant les grandeurs non mesurables. On le fait partiellement ou en
totalité. A partir de la représentation du moteur
par le modèle d'état, on schématise le principe du
reconstructeur d'états dans sa phase estimation
[15]:
u( t )
i( 1(t)
+
Estimateur
g ? t ?
+
f ?t)
?
C
y? ( t)
Variables de sortie
estimées
à
valeurs observables
sur le processus
Variables de sortie
de l'estimateur
à
valeurs non-observables
estimées
u( t)
Processus
u( t)
g ? t ?
+
v(t)
+
+
x? ( t )
f ?t)
J.
x(t)
Variables de sortie
du processus à
valeurs
non observables
C
+
w( t)
+
y(t)
Variables de sortie
du processus à
valeurs
observables
Fig. IV-3.2 : Le processus et son estimateur fonctionnant en
parallèle.
Nota :
· La moins mauvaise estimation d'un bruit, agissant sur un
système, consiste à la supposer nulle. C'est pourquoi les
vecteurs "bruits" v( t) et
w( t) du système à variables
estimées, n'apparaissent pas dans l'estimateur.
· u (t ) correspond au vecteur
d'entrée du système dont les variables sont fonctions du temps.
Les variables peuvent être les tensions ou les courants.
· y (t ) et x (t
)correspondent au vecteur de sortie et au vecteur d'état du
système dont les variables sont fonctions du temps. Ces variables
peuvent être les tensions, les courants, la position et /ou la vitesse
angulaire.
Le moteur et l'estimateur obéissent aux 2 systèmes
différentiels suivants :
|
d
dtx t f t x t g t u t v
t
? ? ? ? ? ? ? ? ? ? ? ?
? ? +
y t C x t w t
? ? ? ? ? ?
? +
|
et
|
d
dt = 71(
+
y t C x t
? ? ? ? ?
= ?
|
|
|
|
(IV-1) : Processus et estimateur.
Nota :
La matrice C est
considérée à coefficients constants.
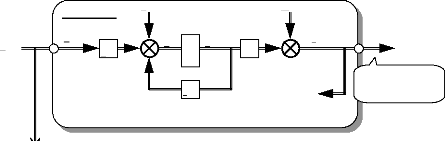
Or, dans cette configuration, rien ne nous permet de
vérifier si les valeurs estimées sont fiables ou non. Il faut
rajouter un dispositif de vérification et de correction des variables
d'états estimées :
u( t)
Processus
u( t) + i(
t) 1( t)
u( t)
Reconstructeur d'états
g( t)
g( t)
+
v( t)
+
+
+
x? ( t )
K
Gain de Correction
Nouvelle
estimation
f( t)
f( t)
I
I
+
x( t)
+
x? c (
t)
C
Ancienne
estimation
C
C
y( t)
E y ( t)
y? ( t)
+
y( t)
w( t)
+
+
-
Variables de sortie
du processus A
valeurs
observables
Variables de sortie
de l'estimateur A
valeurs
estimées non corrigées
observables
sur le
processus
Variables de sortie
de l'estimateur A
valeurs
non-observables
estimées et corrigées
3%c(
t)
Fig.IV-3.3 : Processus avec son reconstructeur
d'états.
Reconstructeur d'état :
d
dt
isk( t ) = f ( t ) l4 t ) + g ( t ) u ( t) A t ) =
C ii( t)
(IV-2)
Vérification de l'erreur sur
la sortie :
Ey ( t ) = y( t ) -- y? (
t)
(IV-3)
Correction de l'estimation du
vecteur d'état :
?x c ( t ) = ?x( t ) + K
E y ( t) ? Nouvelle estimation.
(IV-4)
Le principal inconvénient de cette méthode est
de conserver constant dans le temps, les coefficients de la matrice de gains de
correction. Il faut nécessairement optimiser la valeur de ces
coefficients, quel que soit le fonctionnement du moteur.
De plus, la mesure des grandeurs observables doit être
la plus précise possible pour permettre une comparaison efficace sur les
sorties et permettre une commande toute aussi efficace de l'estimateur. Il est
important de préciser qu'un reconstructeur d'état fait appel
à des moyens de calculs sophistiqués dont les temps de calculs
dépendent essentiellement de l'ordre du système = D'où
l'utilisation d'un microcontrôleur spécifique, propre à
cette fonction. Le traitement de l'information, au moyen d'un pC, impose que le
système continu soit converti en un système discret. On obtient
ainsi une nouvelle représentation du système différentiel.
Pour cela, on pose :
x? tk) =
xk , avec k correspondant au pas
d'échantillonnage à l'instant tk. On obtient
[13] :
k k
e g ? ? u ? ? ? d ? e
f k
( , )
? f k
( , )
?
? ? ? ? ? v(T)) dT
k-1 k-1
? 1
x k e f k k
( , ) ?
? x ?
?
k 1
?
(IV-5)
Le 1er terme de l'expression (IV-5) correspond
à la solution générale du système
différentiel sans second membre.
ef ( k , k-
1 ) correspond à la matrice de transition du
système (passage de
xk_1 à
xk). On notera ce vecteur :
f k k
( , )
? f k
( , )
?
? ? k ,k ?1 ? ? ? ? k k
? e
, ? 1 ?
1 et ? ? k ?
, e
?
?
(IV-6)
Le 2ème terme du second membre de l'expression (IV-5)
correspond à la solution particulière du système
différentielle avec second membre tenant compte de la condition
initiale. Durant la période comprise entre les 2 pas
d'échantillonnage k et k-1, on peut considérer que
u(ti) est resté constant. D'où :
|
k ? k
? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
? g u d
? ? ? ? ?
? ? k g
? ?
k , ? ,
k ? 1 ? k-1
|
1
d u k g d k u k
? ? ?
? 1 ( ) ?
? 1 1
?
|
|
(IV-7)
Le 3ème terme du second membre est mis sous la
forme :
k
v d k ? ? ? v ? ? ?
1 ? ? ? ? ?
( ? ) k ,
k-1
|
dr
|
(IV-8)
Le système différentiel, représentant le
processus et le reconstructeur, devient sous la forme d'un système
discret suivant :
Processus (moteur + machine) :
1. Estimation sous forme de prédiction
:
2. Mesure des grandeurs de sortie mesurables et
comparaison :
(IV-11) : Cy ? k) ? y ? y --
?
k k k
/ 1
3. Réajustement des estimations :
X k k X k k K y k y k k
? = ? ( ? )
+
/ / ? 1 / _ 1
et
y / C X /
? k k = ? k k
(IV-12)
X = I , _ X + g u
k ( )
k k 1 k _ 1 d k
? ?
? 1
y C X w
= +
k k k
Reconstructeur d'état
(IV-9) :
:

X + g
( )
k k
, -- 1 k k
? ?
1 1
/ d k
? ?
? 1
y ? = C X ? k
k
/ ? 1
k k
/ -- 1
(IV-10) :
X ? _ I ?
k k
/ ? 1
u k --1
+ v
k -- 1 d k
(
- 1)
Nota:
Pour éviter des confusions, nous avons rajouté
volontairement un terme supplémentaire en indice à chacune des
variables discrètes ? X k/ k (2ème
k). En effet, ce terme correspond au pas
d'échantillonnage pour lequel on a réalisé les mesures.
Ceci nous permet de savoir si l'estimation est réalisée avant ou
après la mesure.
u( t)
t
k
uk?1
gd k_1
( )
+
Reconstructeur d'état
discrêt
+
+
+
Processus
? X k/ k
? X k/ k? 1
? ( k , k-1)
K
Gain de Correction
Retard
? X k ? 1 / k ? 1
? X k ? 1 / k ? 1
yk
+
? y( k)
C
y( t)
y k k- 1
/
?
t k
-
?
y k k- 1
/
k
t
y? ( t)
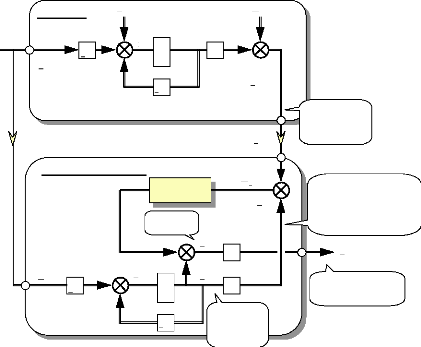
Fig.IV-3.4 : Reconstructeur discret.
Pour mieux comprendre le rôle du reconstructeur, on
detaille de façon chronologique et sous forme de schema, les differentes
tâches a realiser par le 1.1C.

111(k,k-1)
O( k +1,k9
tk-1 Matrice de
transition tk Matrice de transition
tk+1
...
x k - 1 /k-2
y
k- 1 /k-2
Mesures de yk-1 et uk-1
Détermination
de
l'erreur
6 y ( k- 1)
Estimation
de
x ? k- 1 /k - 1
Correction
Tâches à réalisées
par le
microcontrôleur
dans l'intervalle de temps
Mise en mémoire
de
Estimation
de
? x k/ k-1
x k/ k-1
?
Estimation
de
yk /k-1
Mesures de yk et
uk
Détermination
de
l'erreur
C y(k)
Estimation
de
x ? k / k
Correction
Tâches à réalisées
par le
microcontrôleur
dans l'intervalle de temps
Mise en mémoire
de
Estimation
de
? x k+1/k
x k+1/k
?
Estimation
de
,,
yk+1/k
Mesures de yk+1 et
u k+1
Temps en P s
t k -1, t k t k , t k
+1
Instant oil les données sont
saisies par le
microcontrôleur
Fig. IV-3.5 : Tâches réalisées par un
reconstructeur d'état.
Pour ameliorer l'idee du reconstructeur d'etat precedant, nous
proposons d'utiliser une methode qui consiste à tenir compte de toutes
les variables aleatoires susceptibles d'integrer des erreurs dans les
differentes estimations. La methode proposee est :
la méthode de Kalman.
4. RECONSTRUCTEUR D'ETAT EVOLUE DU TYPE « FILTRE DE
KALMAN ».
4.1. Principe du filtre de Kalman :
Le principe adopte par Kalman consiste à adapter la
valeur des paramètres de la matrice de gains K,
à chaque pas d'echantillonnage. Les valeurs adaptees sont fonctions de 3
critères :
1. La confiance que l'on donne,
à la determination de la première estimation par anticipation,
avant correction et à la seconde estimation, après correction.
Cette confiance dépend, elle-même, de la confiance
que l'on donne au pas précédent, modérée par
l'erreur observée sur cette confiance.
Ce critère de confiance est traduit par
Kalman par une matrice que l'on note
P.
2. Le niveau d'influence des différents
bruits imposés au système, compte tenu que
l'estimateur du cas précédent n'en tenait pas compte directement.
Pour matérialiser ces bruits, on peut citer comme exemple sur les
moteurs, les bruits occasionnés par un balourd sur le rotor qui va
provoquer des à-coups de couple. On rappelle que par définition,
un bruit défini un comportement aléatoire traduit sous forme de
signal dont la valeur et son évolution ne peuvent pas être
prédites avec exactitude.
L'influence des bruits du système, sur le
filtre, est traduite par Kalman par
une matrice que l'on note Q.
3. L'influence des bruits sur les
mesures qui faussent la correction de l'estimation.
L'influence des bruits de mesures sur le filtre est traduite par
Kalman par une matrice que l'on note R.
La méthode de Kalman fait appel à des notions de
statistique (espérance, variance et covariance) que nous avons
préféré présenter en annexe.
4.2. Le filtre de Kalman associé aux
systèmes linéaires [14] :
Les matrices P, Q et
R conditionnent la matrice de gain du filtre
K. En plus des
données propres au filtre de Kalman, nous imposons les
hypothèses simplificatrices suivantes :
? Les bruits imposés au système
vk et les bruits de mesures w
k sont des bruits blancs.
D'où, par définition, l'espérance de ces
variables aléatoires est nulle :
E{ vk } = 0 et E(
wk } = 0
(IV-13)
On suppose que les bruits de mesure n'auront pas d'influence
sur les bruits du système et vice et versa = La matrice de
variance-covariance des bruits est donc à coefficients nuls :
cvw
? ? T
= E ??? v w ??? = 0
(IV-14)
? On supposera que les bruits de mesures n'auront pas d'influence
sur l'erreur initiale de la variable d'état estimée et vice et
versa. D'où :
E w x T
??? ? ? ??? ? avec x x
x
?
0 0 = 0 - ? 0/ 0
0
(IV-15)
Les variables aléatoires du vecteur « bruits de
mesures » sont supposées indépendantes entre elles. Les
coefficients de covariance de la matrice de variance-covariance de ce vecteur
sont nuls. Seuls les coefficients sur la diagonale de la matrice (coefficients
de variance) sont différents de 0. Il en est de même pour les
variables aléatoires du vecteur « bruits sur le système
». D'où :
[
[
=
k
10 °T
cvv = E iv k vk
1= E {v k v kT} =
Q
q1 k 0 . 0
i1L
0 q 2k . 0
0 0 0 qnk
(IV-16)
et
I ,, ,, T
cww E iw k
wk
}= E w w
? ?
T ? ?
R
k k k
r1 k 0 . 0
0 r 2k . 0
r 1 ? 1 L
i?
? ?i
k
. .
0
r3
rnk
0 0 0
(IV-17)
Nous venons de définir les matrices
Qk et Rk qui
représentent successivement l'influence des bruits sur le système
et l'influence des bruits sur les mesures.
· D'après l'expression (IV-16), on définit la
matrice de variance-covariance de l'erreur sur la première
estimation (avant correction) du vecteur d'état par:
T
P k / k -1 = E x k -- x k /k _1 x k -- xk/ k
_1
(IV-18)
A partir des expressions (IV-5), on en déduit une
nouvelle expression :
P k k ? ? k k ? P k k ? ?
? T
?

/ ? 1 , ? 1 ? / ?
1 1 k , k ? 1 ? Q 1
d ( k ? )
Matrice de variance-covariance del'erreurr sur
la1èree estimation
(IV-19)
L'expression précédente ne suffit pas
pourdéterminerrPk / k-1,' Il
fautconnaîtree
l'expression deQd (k k1))qui
correspond à la forme discrète de Qkk1. A partir
dee
l'expression (IV-4) et des propriétés sur les
variables aléatoires, on en déduit :
k
? ?
? k ? Q ? ? ? k ? d
T
v(t) v Q
d ( k -1 ) d ( k , k-1 )
? ? , ? ? ? ?
,
k- 1
(IV-20)
· Selon lecritèree des variances minimales,
Kalman a pudéfinirr la matrice des gains de correction par :
K k P k k C ? C P
T T
? C R ?
? k
/ 1
? k k
/ 1
?
-1
(IV-21)
· Dès lors, il est possible d'en déduire
la matrice de variance-covariance de l'erreur sur la deuxième estimation
du vecteur d'état. On obtient :


?P k / k = Pk/k-1 -- Kk C P k/k-1
Matrice de variance-covariance de l'erreur sur la
2ème estimation
(IV-22)
Nous venons de définir la matrice
P, représentant la confiance apportée
aux 2 estimations du vecteur d'état et la matrice
Kkreprésentant les gains de
correction.
Nota :
P0/0 représente la
1ère confiance sur l'estimation des variables d'état
estimées (Matrice des conditions initiales). x0/0 :
Matrice des conditions initiales du vecteur d'état du processus (moteur
+ machine).
x0/0 : Matrice des conditions
initiales du vecteur d'état à variables estimées.
L'évolution de la matrice de gains est
schématisée de la façon suivante :
Q0
R0
P0/0
Kk 6 y(k)

Matrice de
Gains de Correction
Matrice de Kalman
Kk
Représentatif des
erreurs sur la
première
estimation des
variables d'état
+
Pk/k-1
+
(1)( k, k -1 ) P k -1 / k-1 a ( k , k-1)
Kk
Q d ( k --1)
Kk C Pk/k-1
Pk/k
+
+
Kk
?y(k)
Représentatif
des bruits
sur le système
P k / k-1 C T [ C P k /k-1 C T #177; Rk]
(k,k-1)
Représentatif des
erreurs sur la
deuxième
estimation des
variables d'état
Rk
Représentatif
des
bruits de mesures
Retard
? 1
Pk/k-1
Pk - 1 /k-1
Pk/k-1
P k k E ? ? x k x k k ? ? ? x k x ?
? ?
T
? ? ? ? ? k /
k
/ /
Fig.IV-4.1 : Adaptation des gains de correction des
systèmes linéaires d'après la
méthode de
Kalman.
4.3. Le filtre de Kalman étendu aux
systèmes non linéaires [14][16] :
Le principal avantage de cette méthode est de pouvoir
l'étendre aux systèmes non linéaires : Matrice
d'évolution du système dépendante des variables
d'états. Néanmoins, il est impératif de satisfaire une
condition pour adapter réellement cette méthode : Connaître
au moins une solution approchée du système différentiel
que l'on notera xref et que l'on appellera « solution
de référence ».
Tout d'abord, on admet que le système d'équations
différentielles puisse se mettre sous la forme continue suivante :
t ) = f ( x ( t ), u ( t ), t ) + v ( t)
t ) = Cx ( t ) + w ( t) (inchangé )
x? (
y(

(IV-23)
On fait correspondre x 0 re f à la
matrice des conditions initiales du vecteur de référence
xref : Vecteur « solution approchée » du
système. Le but consiste à ramener le système
précédent non linéaire à un système
linéaire afin d'utiliser la méthode de Kalman. Pour cela, on
remplace le vecteur d'état par un nouveau vecteur, correspondant
à l'écart entre le vecteur d'état et son vecteur de «
référence »: x -- xref. Cela revient
à faire la différence de chaque terme des 2 systèmes :

x?(t ) = f( x (t ), u (t ), t) + v
(t) et ?x ref (t ) = f( x ref (t ), u
ref (t ), t)
(IV-24)
On obtient ainsi:
x?(t ) --
*ref (t ) = f(x (t ), u (t ), t ) --
fk ref (t), u ref (t), t ) + v (t)
(IV-25)
A partir de cette nouvelle expression matricielle,
l'idée consiste à remplacer le 2ème membre (sans les
bruits) par son développement en série de Taylor, réduit
au premier ordre.
Mise en application, cela nous donne :
+
+...
v ( t)
? f x t u t t
( ), ( ),
ref
? ? ? ? ?
ref
f x t u t t f x t u t t x t x t
? ( ), ( ), ? ?
? ( ), ( ), ? ?
? ( ) ? ( )
ref ref ref
a x ref (t)
f x t u t t
ref
? ? ?
? ( ), ( ), ? ?
ref
? u t u t
( ) ? ( )
ref
a u ref (t)
(IV-26)
Nota :
La formule mathématique de Taylor correspond
à f ( b ) = f ( a ) + [( b - a) / 1 !] ? ( ) ? ... ? [( ? ) / !]
( )
f a b a n f a
n n
On peut faire une approximation, en supposant que les
entrées imposent de faibles perturbations sur le système. On
supprime donc le dernier terme de l'expression (IV-26). De plus, on a
uref(t) = u(t) .

On obtient ainsi et sous une autre forme :
a[ f (x t u t t ? ? ? ? ?
f x t u t t ? ?
ref ( ), ( ),
ref ( ), ( ),

-- % ( t X 0) +
) + x( t) -- --
ref
a x ref (t) ref a x
ref
( t)x ( t) +
(IV-27)
Or, en posant :
? ? ? ?
? f x t u t t ? ?
ref ( ), ( ),
F t x t
, ( ) ?
x ref ? x t
ref ( )
|
: Fonction "aux dérivées partielles" de
f.
|
|
(IV-28)
Et en linéarisant le système en imposant des
faibles variations à x( t) autour de la trajectoire
de référence x ref ( t ) (on ne tient plus
compte des premiers termes de chaque membre de IV-27), on a :

x?(t ) = Fx (t, x
ref (t)) x(t)+ v (t)
(IV-29)
Si les valeurs approchées de x 0 ref
sont suffisamment voisines de celles de
?x0 estimés
(x 0 -- x 0 ref x 0 --
x?0), on peut espérer
qu'il en sera de même, à chaque instant, pour
x ref (t ) et
x?(t ) . Dans ce cas, on
remplace le vecteur de référence par l'estimation du vecteur
d'état. On linéarise autour de cette estimation et le nouveau
système linéarisé devient :
x?(t ) f t , x ( t ) x ( t ) v ( t
)
? ? ? ?
y ( t ) = Cx ( t ) + w (t)
x t F t x t x t v t
?( ) ? ? ?
, ?( ) ( ) ( )
?
x
y t Cx t w t
? ? ? ? ? ?
? ?
?

Avec
? ? ? ?
? f x t u t t
?( ), ( ), ? ?
F t x t
x , ?( ) --? x t
?( )
On a remplacé xref par
x?
u( t) = U :Matrice à termes
constants
(IV-30)
De la même façon que pour les systèmes
linéaires, on discrètise le système. On en déduit
l'ensemble des équations du filtre de Kalman étendu aux
systèmes non linéaires:
Processus (moteur + machine) :
x ? k k x ? x
? ? , 1 , ? ? 1
? ? v
k k d ( k ? 1 )
y k = C x k #177; wk
(IV-31):

Avec
(IV-32) : ? ? k k x ? eF x k k
x
( , ,? )
?
, ? 1 , ? ? 1
Filtre de Kalman étendu :
1. Estimation sous forme de prédiction
:
(IV-33) :
|
x ? ? ,
? ? k k x
? 1 , ? ? ?
x
k k
/ ? 1 k k
? ?
1 1
/ k k
? 1 / ? 1
y ? k / k-1 = C xk /k-1
|
|
|
|
2. Mesure des grandeurs de sortie mesurables et
comparaison :
(IV-34) : ? y ? k ? = y - y --
k k k
/ 1
3. Réajustement des estimations :
? ( ? )
(IV-35) : ? x k k = x k k ? + K k y
k - C x k / k 1
/ / 1 _
et
(IV-36) : ? y/ C x /
k k = ? k k
4. Matrice de variance-covariance de l'erreur sur la
1ère estimation du vecteur
d'état :
(IV-37) : P k k ( k k x ) P ( k k x )
Q
T
, ? , _ 1 , ?
+
= , _ 1 ?
/ -- 1 k k
1 1
/ k k
1 1
/ k k
1 1
/ d k
_ _ -- -- _ _ ( )
? 1
Avec
(IV-38) : Q ( k k x ) Q ( k k x )
T
= , _ 1 , ? , _ 1 , ?
/ + Q
-- 1 k k
1 1
/ k _ 1 k k
1 1
_ _ _ _
d k
( ) k -- 1
5. Matrice de gains de correction
(inchangée):
? 1
(IV-39) : Kk P k k C [ C
P
T C R ]
T
= + k
/ 1
-- k k
/ 1
--
6. Matrice de variance-covariance de l'erreur sur la
2ème estimation du vecteur
d'état (inchangée) :
(IV-40) : P k/ k = P k / k-- 1 -

Kk CPk /k ? 1
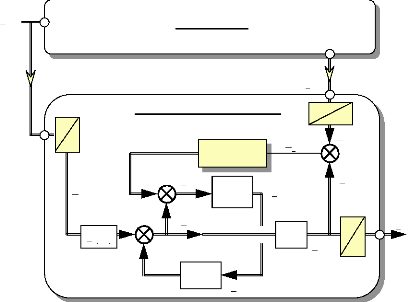
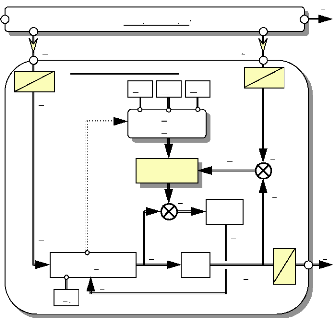
On représente le fonctionnement du filtre de Kalman
étendu aux systèmes non linéaires, sous forme de
schéma-blocs :

u( t)
t k
uk?1
uk?1
u( t)
c1 ( k , k _ 1 , ? xk_
1/k_1)
x0
Filtre de Kalman étendu
? x k_ 1/ k_1
Processus
P0/0
Kk
Gains de Correction
? x k/ k_1
+
+
Pk/k-1 Pk / k
Q0
? x k/ k
R0
C
Retard
6 y( k)
x ? k_ 1/ k_1
y ( t)
y k k- 1
/
?
t k
+
yk
-
?
y k k- 1
/
k
t
y ( t)
y? ( t)
Fig.IV-4.2 :Filtre de Kalman étendu.
5. APPLICATION DU FILTRE DE KALMAN.
Pour cette etude, il est necessaire de definir les elements de
l'estimateur et le referentiel avec lequel, on fera evoluer le système
à variables estimees.
· L'estimateur est commande à partir des tensions
d'entrees. Le couple resistant, impose par la machine entraînee,
constitue l'une des variables d'entree du système = Les tensions et le
couple resistant forment le vecteur d'entrée u
du système. Les tensions sont mesurees et transmises, en temps reel,
à l'estimateur.
Pour eviter un couplemêtre à la machine (capteur
mecanique), on suppose que les caracteristiques de la machine entraînee
sont connues. La machine est definie par sa constante de vitesse
k repondant à la relation : Trma =
kw2.
· La frequence de rotation du moteur et la position du
rotor seront les 2 grandeurs à estimer. Elles constituent, avec les
courants, le vecteur d'état x.
· Les courants sont les grandeurs observables et
constituent le vecteur de sortie y.
5.1. Choix du référentiel pour le filtre
de Kalman :
La situation ideale consisterait à utiliser le
referentiel de Park avec l'axe d, cale sur le rotor.
Neanmoins, cette solution n'est pas compatible parfaitement avec une commande
sans capteur. Pour cela, on justifie cette remarque à partir de la
figure suivante qui represente la commande du moteur dans le referentiel de
Park :
+ -
n*
2n Np
Régulateur
de
Vitesse
+
-
eco
ids *= 0
i*
qs
iqs
+-
ids
+-
6 iqs
cids
?eds
Découpleur
Régulateur
de
Courant
iqs
Régulateur
de
Courant
ids
oi
?eqs
'vqs
?vds
i' = i qs qs
i?ds = ids
3
2
Oi
0
0
[ P1 -1
Estimateur
de Position
angulaire
électrique
du rotor et de
vitesse
*
vas
vbs
*
vcs
*
iqs
Séquenceur/Modulateur
ids
MOTEUR DISCOïDE
A AIMANTS ALTERNES
Circuit
de
Commande
vds
vqs
0
[P1
[ P?
0
vcs
vbs
vas
ias
ibs
ics
MS
3
Aimants P.
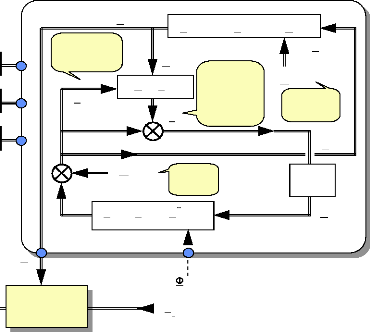
Fig.IV-5.1 : Filtre de Kalman dans le
référentiel de Park.
· Les 4 entrées de l'estimateur et les 2 tensions
de référence en entrées de l'onduleur sont tributaires de
0? (estimé). Or, en reprenant les
équations de Park sur les courants,
on remarque que chaque terme de ces équations est
fonction de ?0. On s'imagine très facilement
qu'une erreur d'estimation sur la position initiale du rotor puisse avoir des
répercutions très importantes sur l'évolution du
reconstructeur d'état, par rapport au système réel (cumul
des erreurs). De plus, les corrections sur les erreurs d'estimation
sont tributaires des courants mesurés qui sont,
eux-mêmes, dépendant de ?0.
· On rajoute que le référentiel de Park
tourne à la vitesse angulaire du rotor à partir d'une position
initiale estimée. Or, une erreur sur cette première estimation
peut décaler l'axe d par rapport à l'axe du
rotor, avec toutes les conséquences que cela suppose. La commande
vectorielle dans Park est très efficace dans des conditions normales de
fonctionnement et l'est, d'autant plus dans son erreur.
La seule condition qui permettrait d'utiliser le filtre de
Kalman, avec le référentiel de Park, serait d'imposer une
position initiale au rotor au premier démarrage. Pour empêcher
d'éliminer un trop grand nombre d'applications industrielles pour
lesquelles on ne tolère pas les déplacements
préliminaires, on décide d'éliminer cette solution. On se
résigne à changer de référentiel. Or, le choix du
référentiel de base (as,bs,cs)
nécessite d'augmenter l'ordre du système et par
conséquent, les temps de calculs (3 équations sur les courants au
lieu de 2). On élimine aussi cette possibilité.
On propose de conserver le référentiel de
Park. Néanmoins, l'axe d de ce référentiel n'est plus
calé sur le rotor mais fixes par rapport à l'axe as.
On a ainsi des grandeurs instantanées, projetées sur les 2 axes,
indépendantes de la position du rotor. Ce référentiel que
nous retenons pour la suite de l'étude, fait appel à la
transformation de "Clarke" et utilise les repères d'axes
(as,f3s,os) et non plus (d,q,o). La commande
du moteur, pour sa part, se traite dans le repère de base
(as,bs,cs).
5.2. Détermination numérique des
équations du système différentiel à variables
estimées dans le repère (as,f3s) :
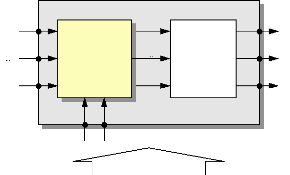
Après avoir traité en annexe 3 la
transformation de Clarke, on présente le nouveau système
différentiel à variables estimées et optimisées
suivant :
Réseau
?
di
a

(a s,b s,cs)
(as,13s )
v as , v bs , vcs i as ,
i bs , ics
Fi l tre de Kalman
Système à variables estimées
Cde
'11aim , R~s,L~s,K~T,
J~, T~ro, T~, k~
A A
i i
as , ps
0, 6i
0, 6
MS
3
Fig. IV-5.2
s (t ) R~ ,s
dt

s
-- si a,s( 0+
ditraim 2
sind( t) + v as( t)L~L~L ss

di0
?
dt r
s
(t ) R~s » "
(t)
-- i Ps (t)-6ittfai
m v 2 COSO(t) + Ps
s
L ~ L ~
s s
d o3s(
t ? ? ? ? ? ? ? ? ? ? ? ? ? ?
N p
? J K i t t i t
? ? t f t T T k t
? ? ? ? ? 2
~ ~ ? cos ? ? ? sin
? ? ~? ~ ~ ~ ? ? ?
?
T s
? ? s r 0
dt
A
dt
t)
_ (B(t)
(IV-41)
Avec J~ = J~m + J~r
Nota:
Attention aux notations, on a volontairement dissocier les
variables à valeurs estimées optimisées (
(0) et les constantes
estimées(~Ls).
On remarque que la présence de 6 et de
6 fait de ce système, un système
différentiel non linéaire. On applique ainsi la
méthode de Kalman [16]. On pose :
f x t u t t ? ?( ), ( ), ?
|
,
|
=
|
r
1
1
1
L
|
f x t u t t
? ?( ), ( ), ?
1
f x t u t t
? ?( ), ( ), ?
2
f x t u t t
? ?( ), ( ), ?
3
f x t u t t
? ?( ), ( ), ?
4
|
1
1
1
L
|
(IV-42)
Avec :
inu n t)
= 6( 0
f1
f2
f3
f4
Et :
Chapitre 4 : Commande sans capteur mécanique
du moteur et Filtre de Kalman.
I3s (
· t) -- 05( 0 11* L
aim 2 cose( t ) + vf" (t)
R~
d v5(t)
ii( 0, u ( t ),
t)
ii( 0, u ( t ), t)
= -
ii( t ), u ( t ), t) = -- KT 3.( t ) sin
k° + KT ; ( t )costi( t) --
3p [1-+ kdi( t)]
(IV-43)
6 ( )
t
t)1 ( t
v as v ps
(
f 1 of 1 012 af1 013 af 1 a
ax1 af 3 ai2 af 3
ai3 af 3 ai
a
a
a
4
4
4
0
Nota: v as et v
as sont des variables d'entrées à valeurs
réelles (non estimées). On a :
f 2 af 2 a12 af 2 a13 af t
as ( 0
1 0 0 =
",
Jos ( t )'tr [0 1 0 u ( t)
(IV-44)
, 4
ST
( t )
a
i s
( t)
0
(t)
L
i( t)
s
( V'
1_1
af (t , i(t))
F 1(t) _
aI(t)
af 4 ai1 af 4 ai2 af 4 ai3 af
4 ai4 (IV-45)
L
Avec :
a
f1
a
a
x1
f2
a
3 Np
a x - _ KT
sin0
a ? f N N
3 p 3
f N p
? ?
t ; ? ? ~ ~ cos ? ;
? ? ? ~ ~ ?
K ? ? ?
t 2 k t
? ? ?
T
? x J ? x J
2 3
? p ~
a
J~
? f
f 3
pitcos 6(t
-- KT 3p inPs(t) sin
es( t)
4
4
a x T Xas
f4 f f4
0
· -- 0 ; -- 1 ; "
=0
^ -
1 a x 4 2 ax 3 ax
(IV-46)
Pour effectuer les différents calculs au moyen d'un
traitement numérique, on utilise les méthodes suivantes :
- 99 -
a
-- K
--
a
a
f
a
4
R~
a f1
0
· " -- --
·
·
9 a x 2 t
9
af 2 --im 2 cos
ós of
ai3 -- L~
a
f2
R~
( t) ; -- 6( t) aim 2
sine( t)
a x
4 ts
; -
t a x
0 ;
af Taim 2 sin 0
af xi°
ai3 L- ~s
x
2
t
)
;
--6(0 aim
2cos0(t)
s v.% #177; as (
t)
R~
i as + 60) L 2 sin 0 ( t )
Lis L~s
s
= -
a
a
1. Calcul de l'évolution des variables d'états
f ( x?(t ), u (t ), t)
:
Méthode d'Euler ?
Evolution de
f ( X( t ), u ( t ), t ) ik / k -1 = ik -1 / k -1 + T (
k , k -1 ) * f ( ik -1 /k -1 , uk-1 ,k -- 1)
(IV-47)
Avec
T(k,k-1) = tk-1 -- tk : Pas
d'échantillonnage.
2. Calcul du vecteur de transition ?? k , k -- 1 , X) =
eFx(...) :
Méthode des développements limités ?
x 2
(Dl ( e x) = 1+ x+ 2 ! +... )
F1 ( t , 1( 0) 4:11(k , k -- 1 ,
ik _1 / k_1 ) = I + T ( 10k-1 ) *
F ( k -- 1, ik _1
/k_1)
(IV-48)
|
|
Nota : On limite la précision au
2 premiers termes du développement.
3. Calcul du vecteur de variance-covariance
Qd(k-1) représentatif des bruits sur le système
vd (k- 1 ) :
Méthode des trapèzes ?
|
v( t ) v d ( k -1 ) Q
d ( k , k-1 )
|
k
? ?
? k ? Q ? ? ? k ? d
T
? ? , ? ? ? ? ?
,
k-1
|
|
Q d ( k , k-1) =[4:11(k , k -- 1 ) * Q *
0T(k , k -- 1) + Q]
(IV-49)
|
* T( k , k-1)
2
|
Ces méthodes de calculs seront utilisées, par la
suite, dans le filtre de Kalman.
5.3. Commande du moteur dans le repère (as,bs,cs)
:
On associe au filtre de Kalman étendu une commande
classique dans le référentiel
(as,bs,cs). Ce paragraphe est ainsi
consacré à la présentation de cette commande. On utilise
une M.L.I pour le contrôle des courants et on impose une commande
à couple maxi de façon à limiter au mieux les pertes
magnétiques. Les équations électriques et
mécaniques, du système à commander dans le repère
(as,bs,cs), sont définies par les
relations :
R1 ?
s aim
? ? t L 2 sin ? ? ? ? ?
t v t
? 1
L i t L v t ? ? ? ? ? ? ?
as as
s s s

)
di as (t
_ --
dt
R 1 ? ? 4 ? ?
s aim
L i t L v t
? ? ? ? ? ? ?
? ? t L 2 sin ? ?
t ? v ? ?
t
cs cs 3
?? ? ?? ?
3
s s s

)
di t
bs (
_ --
dt
1 ? ? 2 ? ?
aim
? ? ? ? ?
? ? t L 2 sin ? ?
t ? v ? ?
t
?? ? 2
3 ?? ?
s
R
s
? ?
t L v t
L i bs bs

)
di cs (t
_ --
dt
d t
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
N p 2
? J K i t cos ? t i t
? ? sin ? t f t T T k t v t
? ? ? ? ? ? ? ? ? ? ?
?
T s
? s r 0 4
dt
d0(
dt
t) -- co( t ) + v 5( t)
Modèle du processus
Nota: Les courants des 2
repères sont liés par la transformation de Clarke (voir annexe
3).
(IV-50)
v1( t), v2( t) , v3(
t) , v4( t) , v5( t)
représentent les bruits du système, fonctions du temps (bruits
blancs).
5.3.a) Régulation des courants ias, ibs et
ics avec compensation des f.e.m [11] :
Contrairement à la commande vectorielle, il
n'est pas possible de découpler le courant qui créé le
flux magnétisant du moteur et le courant qui créé le
couple. Néanmoins, pour améliorer la commande classique, nous
pouvons intégrer à la régulation des courants, un
dispositif de compensation des perturbations imposées par les
f.e.m du moteur. On sait que la tension de la phase as du moteur
correspond à :
di
dt

v as = R s i as +
Ls
6)Waim 2 sin ö
as
(IV-51)
6 et 0 sont les variables
estimées, fournies par le filtre de Kalman.
Nous cherchons à dissocier de l'évolution du
courant le dernier terme de cette expression. Il en est de même pour les
autres phases du moteur.
Nota : Cela revient à
linéariser les courants par rapport aux tensions d'entrées.
Concrètement, on cherche à agir sur le moteur non
plus par les tensions v as,
vbs
et v mais par les nouvelles
tensions, notées u , u , et pour
lesquelles, on
bs ucs
cs as
impose les relations suivantes :

as as -- 6 Taim 2 sinO
v bs = ubs -- 6 Taim 2 sin (6
-- 27c
3
4n
v

cs = u cs -- W6
aim 2 sin (ii --
3
(IV-52)
Ainsi, le système différentiel sur les courants se
simplifie et devient :
i
i


di (t)
as - R~s
_ --
dt L~
di bs (0 R~s
_ --
dt L~
1
as (t ) + L~ u as(t)
s
s
1
bs ( t ) #177; _, u bs(t)
s
s

R~
)
i
_ --
s
cs
L~
s
di cs (t
dt
1
(t )+ L~ u cs(t)
s
(IV-53)
On schématise le principe par la figure suivante :
Fig.IV-5.3 : Commande du moteur avec compensation des
perturbations.
uas
ubs
ucs
Compensateur
63 6
Moteur + Compensateur
de perturbations
vas
vbs
vcs
Moteur
Fintronic
ias
ibs
ics
5.3.b) Générateur de
références sur les courants [11] :
Contrairement à une commande vectorielle, les
références sur les courants ne sont plus à valeurs
constantes mais à valeurs sinusoïdales. Il faut créer un
générateur de références pour la commande du
moteur. On réalise ce générateur selon le critère
optimal de fonctionnement présenté au début de ce
paragraphe ; C'est à dire à couple maxi pour un fonctionnement
donné.
Pour cela, il faut revenir sur l'idée de la commande
vectorielle pour rappeler que
le couple maximal s'obtient pour un courant
maximum porté par l'axe q du
référentiel de Park. Le principe reste le
même pour notre commande, sinon qu'il n'est plus possible d'agir
directement sur ce seul courant d'axe q, dissocié du
reste mais sur les 3 courants du repère (as,bs,cj.
Une telle commande est bien trop compliquée à définir pour
les régime transitoires, c'est pourquoi, on se limite à une
commande élaborée sur l'unique fonctionnement du régime
permanent. On présente l'idée à partir d'une
construction vectorielle de Fresnel:

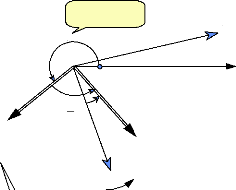
Information connue
à partir de l'estimateur
-,
Vs
0?
?
'I'
2
q
-,
Is
as (fixe)
Fig.IV-5.4 : Construction vectorielle
-
D'après cette construction, on remarque que pour
maintenir le vecteur courant I s
d
(? t

Vrai uniquement
en
régime permanent
(? t
suivant l'axe q (couple maxi), il est
nécessaire d'imposer un décalage avance de ce
vecteur de
90°par rapport à l'axe du rotor qui lui même tourne à
. Cela revient
?? t
à maintenir l'angle N' à
zéro. Remarque :
Dans les cas oü les variations sur la charge sont brutales,
les risques de décrochage du rotor sont à craindre. Il faut se
prémunir de ce risque en maintenant ? voisin de 0 mais
différent de 0..
En considérant que la position estimée du rotor est
définie à chaque instant (filtre de Kalman), on peut s'imposer un
courant de référence de la forme :
? ? ?
iasréf. = I s 2 cos ?? NJ -
-
2 ? ? ?? ? i as ré f=
- I s 2 sin ?
( ?
? ?
-
(IV-54)
Avec
? ? 0


De la même façon, on obtient les courants de
référence sur les autres phases du
moteur, en les
déphasant de 2t 3 et de 4 ir 3 par
rapport au courant de la phase
as.
T i

Sachant que I 2 = max ; K
étant la constante de couple, on peut alors
s T
T
représenter le générateur de
références de la façon suivante :
K
w réf
Tmax i réf
0
+
-
1
KT
Générateur de
références
?
sin (d --v -- 3
sin (6' -- v -- ) 3
-- sin (6 - ? ?
.
.
.
ias
ibs
ics
réf
réf
réf
Fig.IV-5.5 : Générateur de
références.
5.3.c) Synoptique de commande du moteur dans le
repère (as,bs,cs) :
Tmax iréf
? réf
= 0
Générateur
de
références
n réf
-
+
0
ibs réf
+-
ias réf
Régulateur
de
Vitesse
+
Limiteur
+
En
+ -
n?
T rma= Tu = T +
kifi2
-
-
1
2n
ics réf
+ -
??
k
Constante de vitesse
de la machine
Correcteur
PI
Correcteur
PI
Correcteur
PI
ubs vbs
uas
ucs
??
0
Compensateur
de f.e.m
Machine
ics
ibs
ias
Estimateur
reconstructeur d'état
FILTRE
DE
KALMAN
ias
[ Cla?
0
vas
vcs
Trma
i?s
Moteur discoïde
à réluctance
variable
et à aimants permanents alternés
Circuit
de
Commande
+
M.L.I
vas
vos
Tu
[ Cla?
n
vcs
vbs
vas
+
MS
3
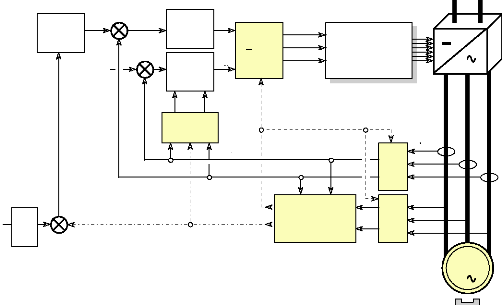
Fig.IV-5.6 : Schéma synoptique de la commande en
vitesse et à couple maxi du moteur, muni
du filtre de Kalman.
Mémoire CNAM Patrick BOIDIN.
5.4. Validation théorique (simulation) de la
commande du moteur avec filtre de Kalman :
5.4.a) Commande en vitesse du moteur avec retour de la
vitesse par le filtre de Kalman (bfesmli.m + filtre1m.m en annexe 4)
:
? Démarrage du moteur, soumis à un échelon
de vitesse de 60 tr/min et sur une charge de la forme : Trma
= T + kw2 .
|
Données de la simulation : (Filtre :EULER/
Moteur+Cde : EULER)/Tk=30 jis : Pas d'échantillonnage
|
|
Machine :
|
Régulation de vitesse :
|
Régulation de courant :
|
Variance-Covariance (coefficients sur la
|
|
J r = 0,1 kg.m2
Trma=130 N.m maxi T=0 N.m
M.L.I :
|
?n =0,010 s
kvp=20/ kvi=90
nréf=60 tr/min
Conditions initiales :
|
kp=130
ki=65
Seuils de limit.-300/300N.m
?réf=0
Filtrage des tensions :
|
diagonale):
P0/0 :700 (Confiance sur la 1ère estimation) Q0 : 6
(bruits sur le système)
R0 : 500 (bruits sur les mesures)
Bruits blancs de mesure :
|
|
00 estimé (filtre)=0 °
00 réel=-30 °
|
|
fp=2,4kHz(fixe)/Up=410 volts
|
Ib max : 0,38A pour In=9,3A
Vbmax: 1,5 volts pour Vn=220 volts Bruits blancs sur le
système :
|
|
fc : 1,5kHz / Ordre : 2
|
|
voir fichier Metafile en annexe 4.
|
Trma en fonction de la vitesse thétha0
réel=-30° Tem et Tr en N.m thétha0 réel=-30°
P0=700/Q0=6/R0=500/Tk=30micro sec. n (tr/min)
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
a) b)
n et n estimé (- -) en tr/min. thétha0
réel=-30° theta et theta estimé (- -) en degré
thétha0 réel=-30°
n estimée
n
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
60
50
40
30
20
10
0
-10
400
350
300
250
200
150
100
50
0
-50
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
140
120
100
80
60
40
20
0
-20
-10 0 10 20 30 40 50 60
Tem
Tr
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
250
200
150
100
50
0
-50
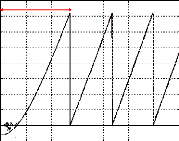
0 estimée
0
1er tour ? 27 ms
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
c) d)
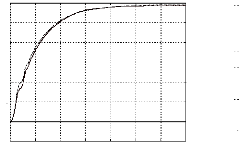
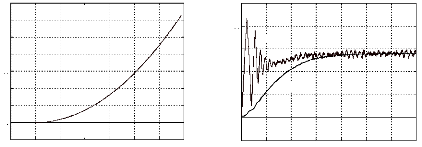
Fig.IV-5.7 : Cde en vitesse du moteur avec retour de
0et n par le filtre de
Kalman.
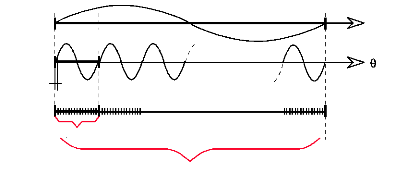
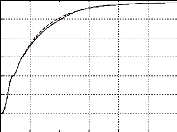
· Les 2 caractéristiques n (t)
et n estimé (t) se suivent assez bien. La
vitesse estimée est légèrement en avance sur la vitesse
réelle.
Mémoire CNAM Patrick BOIDIN.
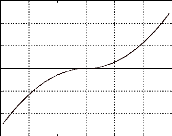
· L'erreur de position du rotor de
-30°, imposée au démarrage, a
été corrigée par le filtre en moins 10
ms.
Erreur sur la vitesse en tr/min. thétha0
réel=-30° Erreur sur la position en degré thétha0
réel=-30°
|
0.5
0
-0.5
-1
-1.5
-2
-2.5
-3
|
|
5 0 -5 -10 -15 -20 -25 -30 -35 -40
|
|
|
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
|
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
|
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
a)
A partir de 20 ms, l'erreur sur la
vitesse est
devenue inférieure à 1%.
ias et is en A thétha0 réel=-30°
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
b)
L'erreur sur la position du rotor est
inférieure
5° sur le tour électrique.
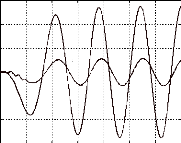
ialpha et ibeta en A thétha0 réel=-30°
|
15 10 5 0 -5 -10 -15
|
|
20 15 10 5 0 -5 -10 -15
|
|
|
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
|
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
|
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
c) d)
e)
On relève une différence notable entre
les
courants i?s et
i?s estimé d'environ
#177;14%.
f)
On relève la même différence entre
les
courants i ? s et i ? s estimé
d'environ #177;14%.
Mémoire CNAM Patrick BOIDIN.
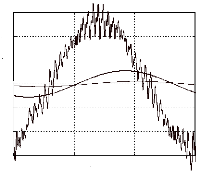
ias (A) / -eas (V)
60
40
20
0
-20
-40
-60
- eas
ias
vas filtrée (V) / ias (A) / -eas (V)
300
vas filtrée
- eas
0
ias
-100
-200
-300
200
100
045 0.05 0.055
Temps (s)
h)
0.06
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
Temps (s)
g)
On releve un léger retard du courant sur
la
f.e.m ? La commande n'est pas tout à fait à
couple
maxi.
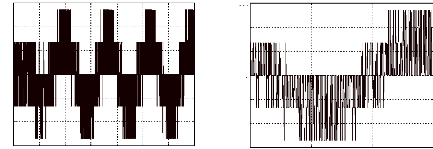
vas en volts thétha0 réel=-30°
vas en volts thétha0 réel=-30°
600
400
200
0
-200
-400
-600
600
400
200
0
-200
-400
-600
|
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
|
0.055 0.06 0.065 0.07
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
|
i) j)
Fig.IV-5.8 : Cde en vitesse du moteur avec retour de
0et n par le filtre de
Kalman.
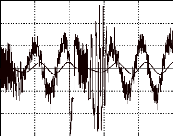
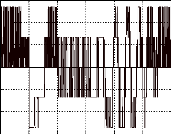
Les tensions telles qu'elles sont vues par le moteur, ne sont pas
exploitables par le filtre de Kalman (ondes générées par
la M.L.I). Il faut les filtrer.
Nota :
On a volontairement indroduit une erreur de -30° sur la
position du rotor par rapport à la position estimée de 0°.
On a obtenu d'assez bons résultats.
Mémoire CNAM Patrick BOIDIN.
· Démarrage du moteur soumis à un
échelon de vitesse de 60 tr/min et inversion du sens de rotation sur une
charge de la forme : T rma = T + kw2 .
|
Données de la simulation : (Filtre :EULER/
Moteur+Cde : EULER)/Tk=30 jis : Pas d'échantillonnage
|
|
Machine :
|
Régulation de vitesse :
|
Régulation de courant :
|
Variance-Covariance (coefficients sur la
|
|
Jr =0,1 kg.m2
Trma=130 N.m maxi T=0 N.m
M.L.I :
|
?n =0,010 s
kvp=20/ kvi=90
nréf=60 et -60 tr/min
Conditions
initiales :
|
kp=130
ki=65
Seuils de limit.-300/300N.m
?réf=0
Filtrage des tensions :
|
diagonale):
P0/0 :700 (Confiance sur la 1ère estimation) Q0 : 6
(bruits sur le système)
R0 : 500 (bruits sur les mesures)
Bruits blancs de mesure :
|
|
00 estimé (filtre)=0 °
00 réel=-30 °
|
|
fp=2,4kHz(fixe)/Up=410 volts
|
Ib max : 0,38A pour In=9,3A
Vbmax: 1,5 volts pour Vn=220 volts Bruits blancs sur le
système :
|
|
fc : 1,5kHz / Ordre : 2
|
|
voir fichier Metafile en annexe 4.
|
Trma en fonction de la vitesse thetha0=-30°
150
100
50
0
-50
-100
-150
-60 -40 -20 0 20 40 60
P0=700/Q0=6/R0=500/Tk=30micro sec. n (tr/min)
a)
n et n estimé (- -) en tr/min. thetha0=-30°
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
c)
Tem et Tr (- -) en N.m thetha0=-30°
|
300
200
100
0 -100 -200 -300
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
b)
theta et theta estimé (- -) en degré
thetha0=-30°
|
400 300 200 100
0 -100 -200 -300
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
d)
Fig. IV-5.9 : Cde en vitesse du moteur avec retour de
0et n par le filtre de Kalman.
Inversion
du sens de rotation
La vitesse estimée a parfaitement suivie la vitesse
réelle lors de l'inversion.
Mémoire CNAM Patrick BOIDIN.
Erreur sur la vitesse en tr/min. thetha0=-30°
|
0.5 0 -0.5
-1
-1.5
-2
-2.5
-3
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
a)
L'erreur sur la vitesse est inférieure
à
0,5tr/min soit moins de 1%.
ias et is en A thetha0=-30°
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
c)
Erreur sur ialpha estimé en A thetha0=-30°
|
10
8
6 4 2 0 -2
-4
-6 -8 -10
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
e)
Erreur sur la position en degré thetha0=-30°
|
5
0
-5 -10 -15 -20 -25 -30 -35 -40
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
b)
L'erreur sur la position est inférieure à
5°sur
le tour électrique.
ialpha et ibeta en A thetha0=-30°
|
20
15
10
5 0 -5 -10 -15 -20 -25
|
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
d)
|
Erreur sur ibeta estimé en A thetha0=-30°
|
10
8
6 4 2 0 -2 -4
-6 -8 -10
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
f)
Fig.IV-5.10 : Cde en vitesse du moteur avec retour de
0et n par le filtre de
Kalman.
Inversion du sens de rotation
Mémoire CNAM Patrick BOIDIN.
600
400
200
0 -200 -400 -600
ias en A et eas en volts thetha0=-30°
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
a)
vas en volts thetha0=-30°
|
600
400
200
0 -200 -400 -600
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
c)
vas filtrée et eas en volts thetha0=-30°
600
400
200
0
-200
-400
-600
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
b)
vas en volts thetha0=-30°
0.04 0.045 0.05 0.055 0.06 0.065
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
d)
Fig.IV-5.11 : Cde en vitesse du moteur avec retour de
0et n par le filtre de
Kalman.
Inversion du sens de rotation
· Démarrage du moteur, soumis à un
échelon de vitesse de 60 tr/min. La position initiale estimée du
rotor correspond à la position réelle.
|
Données de la simulation : (Filtre :EULER/
Moteur+Cde : EULER)/Tk=30 jis : Pas d'échantillonnage
|
|
Machine :
|
Régulation de vitesse :
|
Régulation de courant :
|
Variance-Covariance (coefficients sur la
|
|
Jr =0,1 kg.m2
Trma=130 N.m maxi T=0 N.m
M.L.I :
|
?n ?0,010 s
kvp=15/ kvi=40
nréf=60 tr/min
Conditions initiales :
|
kp=55 ki=10 Seuils de limit.-300/300N.m
?réf=0
Filtrage des tensions :
|
diagonale):
P0/0 :8 (Confiance sur la 1ère estimation) Q0 : 0,6
(bruits sur le système)
R0 : 530 (bruits sur les mesures)
Bruits blancs de mesure :
|
|
?0 estimé (filtre)=0 °
O0 réel=0 °
|
|
fp=2,4kHz(fixe)/Up=410 volts
|
Ib max : 0,38A pour In=9,3A
Vbmax: 1,5 volts pour Vn=220 volts Bruits blancs sur le
système :
|
|
fc : 1,5kHz / Ordre : 2
|
|
voir fichier Metafile en annexe 4.
|
Nota:
Les coefficients des matrices de variance-covariances ont
été repris pour cette simulation.
Mémoire CNAM Patrick BOIDIN.
n et n estimé (- -) en tr/min. théta0 réel=
0°
60
50
40
30
20
10
0
-10
n estimé n
0 0.01 0.02 0.03 0.04 0.05 0.06
P0=8/Q0=0,6/R0=530 Temps (s)
a)
theta et theta estimé (- -) en degré. théta0
réel= 0°
0
0 estimé
0 0.01 0.02 0.03 0.04 0.05 0.06
P0=8/Q0=0,6/R0=530 Temps (s)
b)
400
350 300
250 200
150 100
50
0
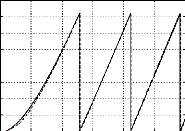
Fig.IV-5.12 Cde en vitesse du moteur avec retour de
0et n par le filtre de
Kalman.
5.4.b) Remarques sur les simulations
effectuées.
Les dizaines de simulations que nous avons effectuées
donnent de bons résultats mais dans des limites bien précises. En
effet, tant que la position du rotor à l'instant initial du
démarrage est restée inférieure à +ou- 90°, le
moteur a démarré dans de bonnes conditions. La commande du moteur
avec son filtre a rattrapé en moins de 60ms les erreurs d'estimation.
Au-delà de + ou - 90°, l'erreur initiale sur la
position du rotor a été plus difficile à rattraper. Dans
certaines situations, le fonctionnement du moteur est resté instable
durant plusieurs secondes.
? Le filtre de Kalman, tel que nous l'avons défini,
fonctionne bien, tant que l'erreur initiale sur la position est restée
acceptable. Ce dispositif a besoin d'être amélioré.
A partir du moment où le filtre de Kalman a permis
d'approcher, au plus vite, la trajectoire de référence
(trajectoire estimée), le système réel a été
capable de se coller sur cette trajectoire et d'y rester. Il suffit d'observer
les résultats sur la simulation où on a inversé le sens de
rotation du moteur, pour s'en persuader.
La dernière simulation montre bien que connaissant la
position initiale du rotor (o0estimé =00 réej, le
filtre de Kalman a joué parfaitement son rôle à une faible
erreur près.
Pour améliorer le dispositif, il faut :
· 1ère idée : Imposer une position
initiale au rotor, avant de démarrer le moteur.
· 2ème idée : Détecter la
position initiale du rotor par un moyen quelconque mais sans capteur
mécanique.
La deuxième idée est a priori difficile à
réaliser car le rotor du moteur est conçu avec une structure
à pôles lisses.
Par contre, la première idée est plus
réaliste et permet d'utiliser efficacement le filtre de Kalman. Par ce
moyen, on peut utiliser, non plus une commande dans le repère
(as,bs,cj, mais une commande vectorielle dans le
repère de Park (d,q).
Mémoire CNAM Patrick
BOIDIN.
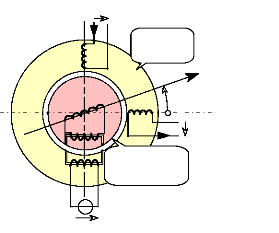
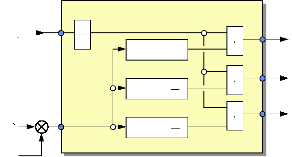
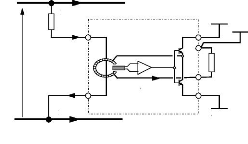
Le tour électrique qui équivaut à
5,625 degré mécanique est suffisamment faible
pour autoriser cette idée. Les moyens à mettre en oeuvre sont
simples à réaliser : Il suffit d'imposer un état à
chaque interrupteur de l'onduleur de telle sorte qu'un courant continu puisse
entrer dans le premier enroulement des phases du moteur et puisse sortir par
les 2 autres enroulements shuntés en sortie. En imposant ces conditions
et un courant continu suffisant, le rotor va se positionner naturellement
suivant l'axe du premier enroulement statorique des phases du moteur.
I
as

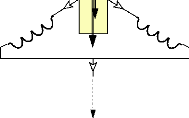
?
Baim
?
BI
I
Axe de la phase as
Fig.IV-5.13: Mise en position initiale du rotor par
injection d'un courant continu. 5.5. Définition des moyens
matériels pour les essais expérimentaux :
A défaut de pouvoir continuer cette étude, nous
présentons le matériel principal et les logiciels qui auraient
permis d'effectuer les essais expérimentaux :
1. Une carte multiprocesseur du type dSPACE DS1102
à multiplication par virgule flottante. Sous sa forme standard,
cette carte est munie :
· Un processeur principal de signal Texas Instrument
TMS320C31 (maître) ayant une fréquence d'horloge de 40 Mhz (temps
de cycle : 50 ns).
· Un processeur secondaire de signal Texas Instrument
TMS32P14 (esclave) pour la gestion de 12 entrées et/ou sorties
numériques et pour la génération des 6 sorties M.L.I.
· 4 convertisseurs "Analogique/Numérique" (#177;
10 volts/16 bits, 10 ts).
· 4 convertisseurs "Numérique/Analogique" (12
bits, 4 ts/#177; 10 volts).
Mémoire CNAM Patrick
BOIDIN.
DS1102 DSP- board
Connecteur
JTAG
Interface
série
· zero wait-states
· 4 096 k Octets
de
mémoire RAM
TMS320C31
Interface
JTAG
Bus d'extension PC/AT
Interface
Serveur
Entrées / Sorties
numériques
Entrée codeur incrémental n°1
Entrée codeur incrémental n°2
TMS320P14
Convertisseur
A/N 16 bits n°1
Convertisseur
A/N 16 bits n°3
Convertisseur
N/A 12 bits n°1
Convertisseur
N/A 12 bits n°3
Convertisseur
A/N 16 bits n°2
Convertisseur
A/N 16 bits n°4
Convertisseur
N/A 12 bits n°2
Convertisseur
N/A 12 bits n°4
Filtre
d'entrée
Filtre
d'entrée
26
Connecteur E/.S A/N
Fig.IV-5.14:Carte DS1102 de Texas Instrument.
· Un interface "Codeur incrémental" pouvant recevoir
2 entrées parallèles (24 bits, 8,3 Mhz).
· Une capacité de travail de 128 kOctets sur 32 bits
soit 4 M.O. de mémoire RAM.
· Un interface d'Entrée/Sortie TMS320C31 du type
"série".
· Un interface d'Entrée/Sortie TMS320C31 du type
"JTAG".
La carte DS1102 se connecte directement sur la carte Mère
du micro-ordinateur par sa liaison bus extensible.
2. Deux capteurs de courant de Marque LEM et de type LA 25-NP
(ou autres) :
· Courants nominal/maxi : 25A/36A
· Entrée/Sortie : 0-25A/0-25mA
· Alimentation auxiliaire : + et - 15volts
· Temps de retard : <1ts
· Bande passante (-1dB) : DC à 150kHz (-1dB)
· Précision à +25°C : #177;0,5% de
In
· Montage : sur circuit imprimé
Mémoire CNAM Patrick
BOIDIN.
+15 volts
'as
0 - 25A
LEM LA 25-NP
0 volts
R mesure
0 - 25mA
-15 volts
Fig.IV-5.15: Capteur de courant.
3. Deux capteurs de tension de Marque LEM et de type LV 25-P (ou
autres) :
· Tension à mesurer : 400volts (Tension
composée)
· Courants nominal : 10mA => Résistance
R1=40k)
· Entrée/Sortie : 0-14mA/0-25mA
· Alimentation auxiliaire : + et - 15volts
· Temps de retard : 40ts pour R1 série 25k)
· Bande passante (-1dB) : DC à 150kHz (-1dB)
· Précision à +25°C : #177;1,6% de
Un
4.
Uab
R mesure
-15 volts
'bs
'as +15 volts
R1
LEM LV 25-P
0 volts
0 - 14mA
0 - 25mA
Fig.IV-5.16: Capteur de tension.
Deux convertisseurs de signaux analogiques 0-25mA (sortie LEM
tensions et courants) / -10V-+10V (entrée DS1102).
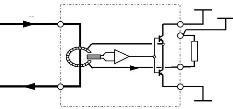
5. De 3 modules de puissance 30A dont l'ensemble constituera les
6 interrupteurs de l'onduleur (IGBT) et son interface de.
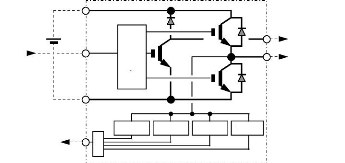
Cde
du bras
Sortie défaut
>1
Court-circuit
Cde
à
Fonctions
intégrées
Surintensité
Température
haute
UV-Lock
Frein
Phase du moteur
Fig.IV-5.17: Module de puissance d'un bras onduleur.
Mémoire CNAM Patrick BOIDIN.
Un capteur de position du type codeur absolu 12bits
CHM61054C3R/4096 de marque IDEACOD Hohner AUTOMATION. Ce capteur est
indispensable à la validation des paramètres de réglage du
filtre. En effet, il faut s'assurer que le système à variables
estimées évolue de la même façon que le moteur avant
de réguler
sur les paramètres estimées ?? et
0? .
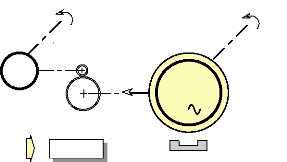
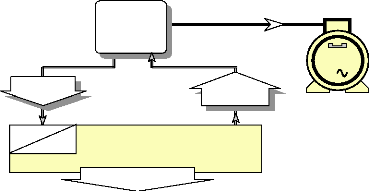
6. Les options logiciels complémentaires à
MATLAB-SIMULINK (Scientific Software - Sèvres) pour carte DS1102:
· RTW (Real-Time Workshop).
· RTI31 (Real-Time Interface).
· TRACE31W TRACE, MS-Windows (non indispensable à
l'application mais bien utile).
· COCKPIT31W COCKPIT, MS-Windows (non indispensable
à l'application mais bien utile).

variables Paramètres
Unité de pilotage
COCKPIT
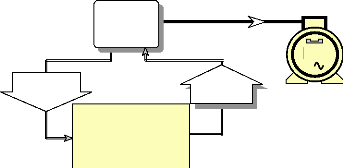
Fig.IV-5.18

PROCESSUS
ET
SES INTERFACES
Paramètres
SIMULINK
· Cde et régulation
Interface temps réel
(Real-Time Interface)
compilateur C
(C compiler)
Téléchargeur
(Loader)
Real-Time
Workshop
MATLAB
· Filtre de Kalman
DS1102
JL C
Codage
du modèle
en "C"
Affichage des
courbes
graphiques
Enregistrement
des données
TRACE
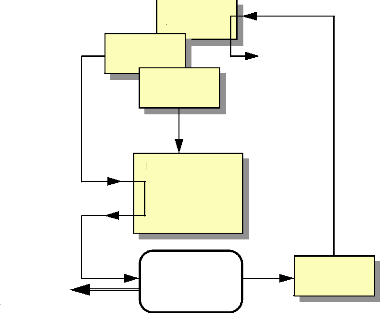
Pour exécuter l'application avec la carte tC, il faut
convertir les algorithmes de contrôle-commande écrits sous
Matlab-Simulink, en langage C. De plus, il faut compiler les lignes de
programme, établir les liens d'adressage avec le carte et
télécharger les données.
Mémoire CNAM Patrick BOIDIN.
Ce sont les 2 premières options logiciels qui
réalisent ces tâches. Il faut noter qu'il n'est pas
nécessaire d'écrire les algorithmes de commande directement en
langage C, le programme s'en charge avec tous les avantages que cela supposent
en gain de temps et en fiabilité.
L'option COCKPIT permet de commander et contrôler le
processus directement depuis le clavier du micro-ordinateur.
L'option TRACE permet de transférer les données
(mesures) à mémoriser dans MATLAB de façon à
analyser le comportement du processus en temps différé (Sorties
graphiques sur écran).
Nous pensons que les moyens logiciels tels que nous les
avons présentés ci dessus, correspondent à l'outil
idéal à l'élaboration d'une commande de moteur de tous
types. Il faut néanmoins préciser que ce matériel n'est
pas adapté, par son coût (environ 50 000 francs), au produit final
capable de commander le moteur "Fintronic". Il faudra donc après
certitude sur la faisabilité de la commande étudiée,
déterminer l'outil le mieux adapté aux tâches à
exécuter.
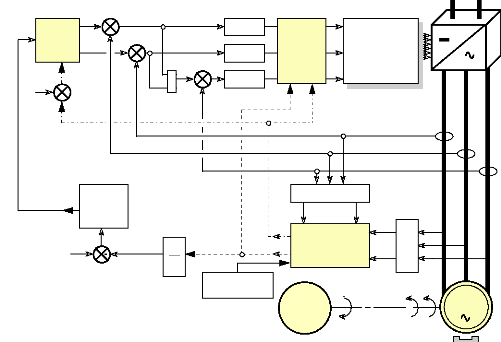
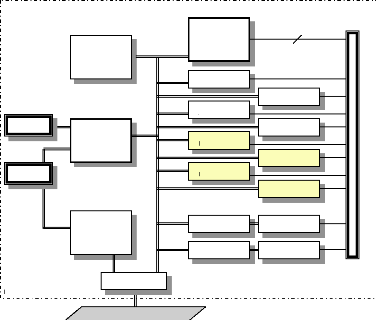
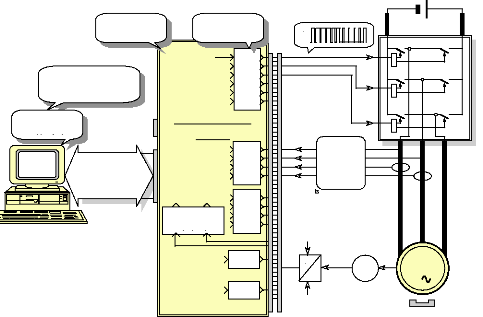
La figure qui suit, présente le matériel
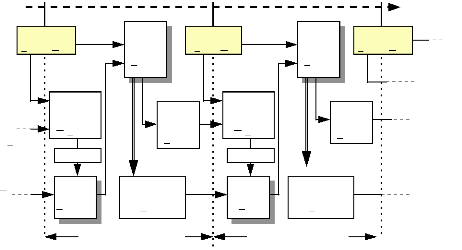
nécessaire aux travaux expérimentaux d'une commande sans capteur
mécanique du moteur.
Matlab-Simulink
Version 4.2c.1
MathWorks
Algorithme de Crt/Cde
du moteur
Estimateur de position du
rotor
486DX66
RTI31
Interface
Simulink/DS1102
+
Real Time
Workshop
Microcontrôleurs
TMS320C31
TMS320P14
Connecteurs
liaison série
+ JTAG
12 Entrées
TTL (0-5V)
Traitement de la position
Bus PC/AT
Encoder
Phase Lines Unit
DS1102ENC
Rapport cyclique
0-100%/-1-+1
Carte dSPACE
DS1102
4 I/O TTL en réserves
Fréquences ajustables
Bit-I/O
IN ou OUT
Bit-I/O
IN
DS1102
DS1102
DS1102
PWM
Unit
ADC
Unit
DAC
Unit
PWM
AD
DA
Sub62
Alimentation TTL
0-5volts
+10 -10vol
Alimentation Codeur 0-15volts
+5v
0v
Exemple de signal en MLI
5V
15V
Interface
Signaux
Analogiques
(Convertisseurs)
Codeur Absolu 12 bits
Sortie Push-Pull 11-27V
Capteur de
position
C
t
0-25mA
I1
I2
I3
Aimants P.
vas
ias
MS
3
ibs
vbs
I'1
I'2
I'3
Capteurs de
Tension
Capteurs de
Courant
O
n
d
u
l
e
u
r
MOTEUR DISCOïDE
A AIMANTS ALTERNES
Fig. IV-5.19
Mémoire CNAM Patrick BOIDIN.
6. CONCLUSION
Cette étude a permis de démontrer qu'il n'est
pas aussi évident de remplacer le capteur mécanique par le filtre
de Kalman. Néanmoins, nous restons persuadé que le FILTRE DE
KALMAN est le seul outil, actuel, capable de réaliser cette tâche
à moindre coût.
L'inconvénient majeur de ce dispositif, tel que nous
l'avons étudié, vient des conditions initiales sur la position du
rotor qui conditionnent l'ensemble du système.
= Il faut impérativement trouver un moyen technique
qui permettrait de connaître la position initiale du rotor. Par cette
seule condition, il sera alors possible d'utiliser la commande vectorielle de
PARK.
De plus, cette étude sans capteur aurait besoin
d'être complétée par les études que nous n'avons pas
pu réaliser dans ce mémoire. Elles sont:
· La prise en compte, dans le filtre de Kalman, des
erreurs possibles d'évolution du système dues à la
variation des paramètres supposés constants (résistance,
flux, inductance synchrone, etc.).
· La détermination, par le calcul, de la valeur
optimale des coefficients de variance des Matrices de variance-covariance.
· L'intégration dans le vecteur d'état, du
couple résistant afin de l'estimer. Cas, où on ne connaît
pas les caractéristiques mécaniques de la machine
entraînée.
· L'étude du système à variables
estimées, en limitant l'ordre du système aux seules variables
à estimer (vitesse, position et couple résistant).
Cette solution risque d'être peu concluante. En effet,
les tensions et les courants feraient alors partie du vecteur d'entrée
avec une constante électrique élevée entre ces 2
entrées. Le système à variables d'état
estimées risque d'évoluer avec un certain retard par rapport au
système réel. Néanmoins, l'étude mérite
d'être effectuée car le système se ramènerait
à un système d'ordre 3 au lieu de 4 (avec l'estimation du couple
résistant).
· L'étude complémentaire de la commande qui
tient compte des cas où la vitesse du moteur est supérieure
à la vitesse nominale (commande à puissance constante).
· L'amélioration technique des
générateurs de M.L.I. qui est l'élément primordial
de la commande avec et sans capteur mécanique de ce moteur (constante de
couple élevée). De plus, il faut soigner l'entrée des
courants sur le filtre car ce sont ces courant qui servent de
référence à la correction des prédictions.
· L'étude des moyens permettant de détecter
la position du rotor à l'arrêt bien que le moteur ait un rotor
à pôles lisses.
| 
