Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
Données de la simulation : Commande en
vitesse.
|
Machine :
|
M.L.I :
|
Régulation de courant :
|
Régulation de vitesse:
|
Jr =0,2 kg.m2
T=0 N.m
k=85.10-5 N.m/rad.s-1
|
Fréquence de la porteuse : 2,4kHz Indice de modulation m
:48
Conditions initiales :
|
Cdp=35 / Cdi=200
Cqp=14/ Cqi=0
Seuils de limitation:-13A/+13A
|
Tn=0,01s
Cvp=1,5 / Cvi=3,5 n*=60tr/min
|
|
|
70
60
50
40
30
20
10
0
-10
(tr/m in)
n
*
n
1 80
1 60
1 40
1 20
1 00
8 0
6 0
4 0
2 0
0
-20
(N .m )
Tem
T r
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
Temps (s)
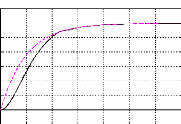
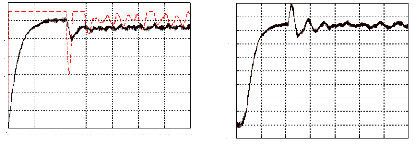
a) Fréquence de rotation du moteur et
sa
référence : n (t ) n ( t ) .
*
et
(N .m )
140
120
100
80
60
40
20
0
-20
T rm a (n)
-10
40
20
10
60
50
30
0
F réquence de rotation (tr/m in)
a) Caractéristique de la machine entrainée
:
Trma( n).
13 0 0
400
200
0
-200
-400
-1300
0.013 0.0131 0.0132 0.0133 0.0134 0.0135 0.01313
0.0137
va s
v M a s
Tem ps (s)
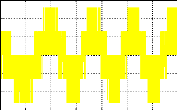
c) Modulatrice et tension de phase : v Mas
( t)
et v as (t ).
Temps (s)
0 0 .0 1 0 .0 2 0 .0 3 0.04 0.05 0 .0 6 0 .0 7
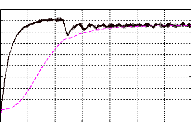
b) Evolution dans le temps du
couple
électromagnétique et du couple résistant
:
Tem (t ).
1300 400 200 0 -200 -400 -1300
(V )
vas
0 0.01 0.02 0.03 0.04 0.05 0.013 0.07
Tem ps (s)
b) Tension aux bornes de la phase as du
moteur :
v as (t ).
300
v M a s
250
ias
200
1 5 0
100
50
0
0.045
0.05
0.055
Tem ps (s)
d) Détails sur les ondes de tension
(modulatrice) et
de courant de la phase as :
i as(t ) et
v Mas(t ).
Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
(A) Angle interne : Sigma
iqs
iqs*
14
12
10
8
6
4
2
0
90
80
70
60
50
40
30
20
10
0
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
Temps (s)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
-10
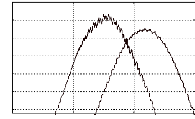
e) Courant de Park sur l'axe q et sa
référence:
i qs (t ) et i
qsref (t ) .
thetar (°) Temps (s)
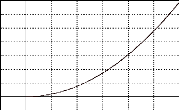
f) Evolution de l'angle interne durant la phase
de
démarrage du moteur : 6 (t) .
ids (A)
180
160
140
120
100
80
60
40
20
0
12
10
8
6
4
2
0
-2
-4
-6
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0 0.01 0.02 0.03 0.04
0.05
Temps (s) Temps (s)
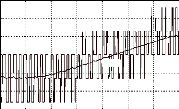
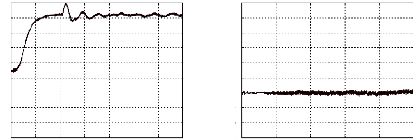
g) Evolution de la position du rotor par h) Courant de Park sur
l'axe d : i ds (t ).
rapport au champs statorique tournant: Or (t
).
Fig. III-6.11 : Résultats des simulations. Commande
en vitesse du moteur.
7. REMARQUES ET CONCLUSION.
Cette étude permet de juger les performances
théoriques du moteur, associé à une commande en
couple et en vitesse avec capteur mécanique.
Les remarques importantes que l'on peut faire sur les
simulations sont les suivantes :
· Le moteur FINTRONIC est plus favorable à une
commande en couple, ce qui confirme son appellation de moteur "couple". Les
résultats sont satisfaisants pour la commande en vitesse.
· Qu'elles que soient les contraintes de couple, le moteur
a su réagir efficacement avec des délais très
raisonnables, inférieurs à 30ms.
| 

