Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
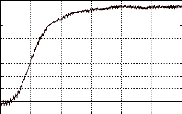
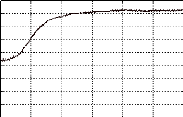
· La vitesse qui évolue librement, atteint son
régime permanent en 60ms.
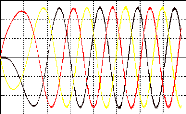
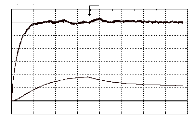
· La forme de ce courant correspond à l'image du
couple électromagnétique, à la constante de couple
près. Le découpleur a fonctionné correctement.
(V )
4 00
3 00
V P
2 00
1 00
0
t
-1 00
-2 00
V M as
-3 00
4 00
0.07 0.07 1 0.0 72 0.07 3 0.0 74 0.07 5 0.0 76 0 .077
Tem p s (s)
0
-600
0.07 0.071 0.072 0.073 0.074 0.075
Tem ps (s)
Comm a n de I1
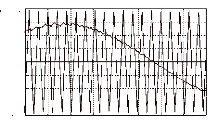
a) Forme de l'onde de la porteuse et de la
modulatrice sur
la phase as.
(A )
15
10
5
0
-5
-10
-15
ibs ics ia s
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
Tem ps (s)
c) Evolution des courants de phase durant
le
démarrage du moteur : i as ( t ) , i bs ( t
) et i cs ( t).
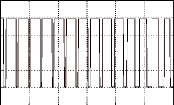
b) Commande de l'interrupteur n° 1 du
pont
onduleur.
(A )
5
4
3
2
1
0
-1
-2
-3
-4
-5
0.06 0.062 0.064 0.066 0.068 0.07 0.072 0.074 0.076 0.078
id s
Tem ps (s)
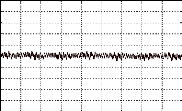
d) Courant de Park sur l'axe d : i ds( t )
.
(° Angle interne du m oteur : D éphasage
Tension/f.e.m
80
70
60
50
40
30
20
10
0
-10
0 0.005 0.01
0.015 0.02 0.025 0.03
6
180 160 140 120 100
80 60
40
20
0
Tem ps (s)
(°) Angle de déphasage Rotor/stator
0.005 0.01 0.015 0.02 0.025 0.03
Tem ps (s)
D r
e) Evolution de l'angle interne durant la phase
de
démarrage du moteur : 6 ( t) .
f) Evolution de la position du rotor par
rapport au champ
stat. tournant : O r ( t) .
|
|
Fig.III-6.6 : Résultats des simulations. Commande en
couple du moteur. ? La position du rotor oscille de #177;4° autour de
sa valeur moyenne.
Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
· Simulation n°2 : Démarrage du moteur
avec à-coups de charge de 50N.m.
Données de la simulation : Commande en
couple.
|
Machine :
|
M.L.I :
|
Régulation de courant :
|
Conditions initiales :
|
Jr =0,2 kg.m2
T=0/+50N.m
k=0,408 N.m/rad.s-1
|
Fréquence de la porteuse : 2,4kHz Indice de modulation m
:48
|
Cdp=35 / Cdi=200 Cqp=17/ Cqi=350
T * = 120 N. m
|
00 = 0 °
|
|
140
120
100
80
60
40
20
0
(N .m ) (tr/m in )
A-coups de charge de 50N .m
Tref
T em
n
(N .m )
1 6 0
1 4 0
1 2 0
1 0 0
8 0
6 0
T r m a (n )
4 0
2 0
0
2 0
t > 3 5 m s
t < 3 5 m s
-20
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
Temps (s)
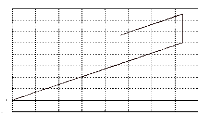
a) Couple et fréquence de rotation :
Tem (t ) et n
(t)
.
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0
F ré q u e n c e d e rotation (tr/m in ) (s)
b) Caractéristique de la machine : T
rma(n).
Fig.III-6.7 : Résultats des simulations. Commande en
couple du moteur.
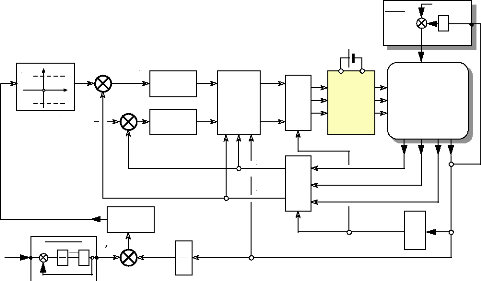
6.4. Commande en vitesse avec un onduleur de tension
à M.L.I ; Simulation.
· Simulation n°3 : Démarrage du moteur
sans à-coups de charge et de vitesse (Onduleur à
M.L.I).
nref
tr/min
Limiteur à seuils
Imax
Imin
+
(A)
Filtre du 1er ordre
-
1
sn
Idsref = 0
t
dn
dt
*
iqsref
?
+
n
-
correcteur
PI
+
+
?iqs
?ids
-
ids
En
-
Correcteur
PI
Correcteur
PI
n
60
2.11
uds
u qs
Découpleur
linéarisant
?
iqs
ids ?
i ?ds -- ids
i?qs = iqs
v?qs
?vds
0
0
[ P? ?1
[P]
vMas
vMbs
vMcs
Onduleur
+
Cde
logique
U
vas
vbs
vcs
Machine
ias
ibs
ics
Modèle du moteur
discoïde à
réluctance
variable et
à aimants permanents
0
J
+
+
Trma
?
T
k
?
CO
Fig III-6.8: Schéma synoptique de la commande en
vitesse du moteur FINTRONIC.
- 76 -
| 

