Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
C
bs
cs
Décision prise
à l'instant
considéré
-->
I s
as
i
Point de référence
S
Axe du flux
statorique
?
N
? i
a
S
i
-->
? aim
N
Axe rotor
Le rotor tend à vouloir s'aligner
avec
l'axe du flux statorique
Fig. III-2.2
Analyse
de la situation
à
l'instant
considéré
Mise en
application de la
décision
prise
Capteur de
position
du
rotor
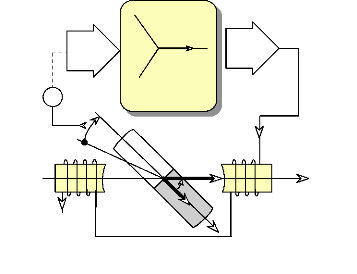
La figure III-2.2 représente, sous une forme
simplifiée, le principe de fonctionnement du moteur synchrone à
aimants permanents avec son autopilotage.
2.4. Contrôle par la tension du couple
électromagnétique :
Le moteur est commandé en tension. Il faut donc exprimer
le couple électromagnétique
en fonction de v
qs et non plus en fonction de iqs.
On obtient ainsi, à partir des équations
suivantes :
qs
di ds
v R i L
? ? ? ? L i
ds s ds d d
dt
|
v qs = R s i qs Ld
|
di
dtqs
+coL di
|
? ?ds Wdaim
|
1
T em -- T r = ( J m +
JN
p
iqs
? d ? ?
dt f T K
r ) ? ? ?
Avec
?? ?? em T
(III-2)
la nouvelle expression,
KT di qs
T em =v -- L
R qs d dt --0 L d i ds --
(1)1Pdaim
s
(III-3)
qui est devenu dépendant non seulement de
v mais aussi de et de la variation de
ids
qs
Pour supprimer une partie de cet inconvénient, on impose
un courant i nul au moyen
ds
d'une régulation sur ce courant avec une
référence nulle. En supposant que la vitesse est restée
constante durant la perturbation, on obtient alors :
Tem
K ? di
T qs
= R v L
?? - ? ?0 ?
qs d daim
dt
s
(III-4)
On a ainsi une équation différentielle à
coefficients constants facilement résolvable de la forme :
i qs
L di v
d qs qs ? O)0 " daim
+ ?
R dt R R
s s s
(III-5)
Nota:
Cette condition est indispensable pour définir les
paramétres d'un correcteur du type PI qui de par sa nature gére
des systémes uniquement linéaires.
3. MODELE D'ETAT DU MOTEUR ET CHOIX DES VARIABLES
D'ETATS.
3.1. Définition et notations :
Tout système linéaire, continu et à
variables multiples, peut être représenté par le
modéle d'état suivant :
x? Ax Bu v

= + +
y Cx Du w
= + +
(III-6)
Avec
A : Matrice (n,n) d'évolution du
système.
B : Matrice (n,ne) d'application de la
commande.
C : Matrice (ns,n) de sortie du
système.
D : Matrice (ns,ne) d'action directe sur le
système.
x : Matrice d'état.
x? : Matrice dérivée de la matrice
d'état.
u : Matrice d'entrée.
y : Matrice de sortie.
v : Bruit d'état du système. Ce
vecteur représente les incertitudes de la modélisation.
w : Bruit de mesure du systéme. Ce
vecteur représente les bruits affectés par les différents
capteurs des grandeurs mesurées.
| 

