CHAPITRE 3
COMMANDE VECTORIELLE
AVEC
CAPTEUR
MECANIQUE
1. OBJET.
Dans cette partie d'étude, nous avons
développé puis testé, par des simulations, une commande
vectorielle dans le formalisme de Park. Pour cela, on a utilisé un
onduleur de tension muni d'un dispositif de contrôle des courants et de
découplage que l'on présente dans ce chapitre. Le formalisme de
Park est le seul moyen technique actuel qui permet d'agir directement sur les
grandeurs instantanées du moteur et d'obtenir une commande dynamique.
Néanmoins, son utilisation n'est pas sans contrainte et impose de
connaître à chaque instant, la position du rotor : Matrice de
passage, fonction de 0. Pour limiter l'étude de la
commande, dans un premier temps, on supposera que la position du rotor est
parfaitement connu.
2. PREAMBULE. 2.1. Le moteur synchrone :
La particularité essentielle du prototype qui
s'apparente à un moteur synchrone, est d'avoir une vitesse de rotation
« synchrone » avec la pulsation de la source qui l'alimente.
Contrairement au moteur asynchrone, aucun glissement prolongé n'est
toléré. Seul, le décalage entre les champs tournants est
possible et ne doit pas dépasser une certaine limite dépendante
de la charge entraînée. Il est possible, néanmoins, de
contrôler ce décalage, en agissant sur l'amplitude et/ou la phase
des 2 grandeurs électriques en rotation. Dans le cas d'un moteur
à aimants permanents, on agit uniquement sur une seule grandeur, l'autre
n'étant pas accessible.
Remarque :
Pour un couple résistant donné, il est possible
de limiter au mieux les courants absorbés par le moteur. Il suffit de
réduire ces courants de façon à obtenir un décalage
entre le flux rotorique et le flux statorique de 90° électrique.
Dans cette situation, le couple résistant est égal au maximum de
couple, capable d'être fourni par le moteur.? L'avantage de ce type de
fonctionnement est de limiter les pertes magnétiques. Ce mode de
fonctionnement est appelé communement « Commande à
couple maxi ».
2.2. Commande du moteur « Fintronic », en
courant ou en tension? :
La source d'alimentation du moteur peut être en tension
ou en courant et dépend du type de récepteur que l'on doit
alimenter. On rappelle qu'une source de tension ne peut pas alimenter un
récepteur de tension et de même pour les courants. Il faut donc
savoir si le moteur « Fintronic » est un récepteur de courant
ou un récepteur de tension.
En reprenant les équations de Park, on remarque que le
couple électromagnétique est directement proportionnel au courant
d'axe q.
Tem = K T . iqs
(III-1)
Cette expression nous montre que le meilleur moyen de
contrôler le couple instantané de la machine, serait d'utiliser
une commande en courant. Par contre, cette condition suppose de
laisser évoluer librement les tensions. Or, si le moteur à
l'essai est plus inductif que capacitif, on verrait apparaître des
surtensions aux bornes du moteur et des composants de puissance.
La f.e.m à vide, induite par les aimants, est
relativement faible dans le cas particulier des moteurs à aimants
permanents. Il faut donc compenser cet inconvénient en imposant une
réaction d'induit magnétisante plus importante que normale. Or,
pour limiter les courants à des valeurs acceptables et répondre
à la demande, il faut augmenter la valeur de l'inductance synchrone du
moteur et imposer un circuit plus inductif au stator.
le moteur « Fintronic » est un
récepteur de courant qui demande une commande en tension avec un
contrôle des courants.
2.3. Principe de la commande en tension et de
l'autopilotage du moteur :
Commander le moteur à partir d'une source de tension et
contrôler les courants revient à effectuer une commande selon le
principe suivant :

Rotation de la charge
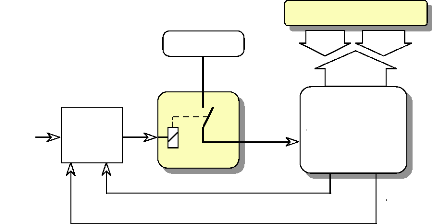
Courants
désirés
Contrôle
des
Courants
+
Autopilotage
(Boucle d'autopilotage) Position du rotor/repére fixe
Ecarts
Source de Tension
continue
Convertisseur
de Puissance
Tensions appliquées au moteur
Moteur
à réluctance variable
et à
aimants alternés
Couple
résistant
Charge à mettre
en mouvement
Couple
électromagnétique
+
Vitesse
Fintronic
Moment
d'inertie
Courants
obtenus
Courants
obtenus
Fig. III-2.1
L'information de position constituant la boucle d'autopilotage,
sert à asservir la position

du flux statorique à celui du rotor "
.
aim
| 

