Chapitre 2 : Essais expérimentaux et validation
du modèle - Mémoire CNAM Patrick BOIDIN.
.
'
R s I s
?
1 ,4 A
= c I =
-,
L d w I s '
-,
9 0?
-,
L d WI s
9 0F
Simulation :
Essai :
Paim
-,
?
?
?
Es
Vs
-->
'I'
?
??
?
R I = 16 4
, volts
s s
?
?
R I 18 1
, volts
s s =
?
d
-,
'P i
,
??
q
L I 245 volts
d W =
s
?
L I 268 volts
d w =
s
?
V = 277 6
,volts
s
?
V = 277 6
, volts
s
?
q'
E = 44 3
,volts
s
?
I = 14 6
, A
s
E = 44 3
,volts
s
?
I = 16 0
, A
s
-,
-,
1J r
'
Is
? = 79 5
, 0
6 'I'
= 40 0
, °
= 39 5
, 0
? ? ? = 6 ,9 °
(p' = 72 6
, °
-,
R s I s
d'
-,
Wi
-,
Wr
-,
Is'
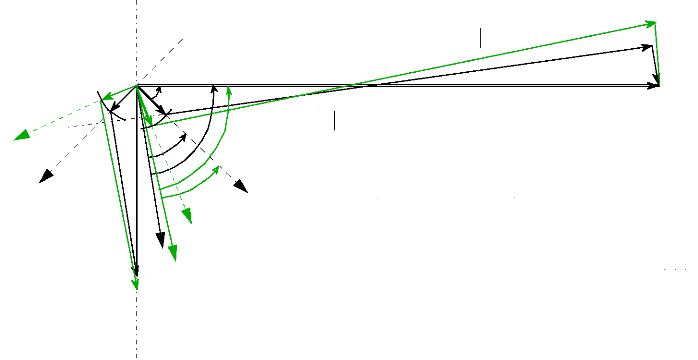
Fig. II-4.5 : Construction
vectorielle dans l'hypothèse de Behn-Eschenburg.
Moteur chargé
à 138,5 N.m et soumis à une tension composée de 340
volts.
Les résultats permettent de faire les observations
suivantes :
* La valeur du courant efficace obtenue par la simulation est
inférieure de 1,4A par rapport à la valeur de l'essai. Ceci
s'explique par les pertes magnétiques qui sont négligées
dans le modèle.
Connaissant la valeur des pertes magnétiques
Pmag = 717 W et supposant
qu'elles sont proportionnelles au carré de la tension, on
peut en déduire la résistance équivalente
Rm, puis le courant I
rm :

1 ,2
A
(II-21)
U 2 ab 340 2
= _ = 161 I = ab = _
Pmag 717
R m
U
3
R
m
161 3
Or, ce courant représente effectivement la
différence obtenue à 0,2 A prés et correspond à
11,6% du courant absorbé (10,3A).
* La différence sur le déphasage de 6,9°,
entre la tension et le courant, est due aux
|
pertes magnétiques. Si on rajoute le courant
|
....
Irm à la composante active
du
|
courant Is, on obtiendrait le nouveau
déphasage (p" suivant :
--> ->
I ac ( actips I rm
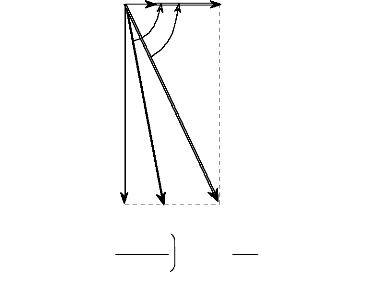
A. A.
(p = 79 ,5° (P I ac = Is cos p
= 2 ,63 A
A. A.
? I ac + I rm = 4 ,36A
(p"
-->
Is''
-->
I r ( ré actins
I r = I s sin p = 14 ,4 A
-->
Is
Fig. II-4.6
arctan(
...
Is sin
... ...
I oas + Irm
(II-22)
(? 14 4 ,
4 36 73 1 ?? ? , ? ,
-- arctan
I, =
Soit un écart théorique de 0,5°(très
acceptable).
4.3. Validation du modèle :
Les simulations font apparaître la
nécessité de tenir compte des pertes magnétiques dans le
modèle mathématique = Le modèle, tel qu'il est
défini, créé une erreur sur les courants de 11,6%. On
remarque 2 points essentiels :
1. La consommation d'un courant actif
supplémentaire a pour effet de déphaser en moins le courant par
rapport à la tension (72,6° pour 79,5°).
2. L'angle interne du moteur a sensiblement augmenté, ce
qui correspond à un décalage supplémentaire du rotor par
rapport au champ statorique.
= Ces 2 constatations ont des conséquences importantes. En
effet, si on projette le vecteur courant sur les axes d et q, on fait les
remarques suivantes [7] :
1. Pour un même couple résistant et dans le cas
où les pertes magnétiques ne sont pas négligées,
Iqs (régime permanent) a augmenté =
Dans le modèle, on peut s'imaginer que la
différence de ces courants est
absorbée par une
résistance fictive.
2. Pour un même flux magnétisant et dans le cas
où les pertes magnétiques ne sont pas négligées,
Ids (régime permanent) a diminué = Il y a eu
un
renforcement de ce courant dû à l'augmentation de
Iqs.
Dans le modèle, on peut s'imaginer que la
différence de ces courants est
fournie par la réaction
d'induit. Sa valeur dépend de la résistance
fictive du cas
précédent.
|
5. CONCLUSION.
· En boucle ouverte, le moteur démarre sur le
réseau à 50Hz sans difficulté. Ceci est dû au nombre
important de pas (64), assimilable au nombre de paire de pôles et
à la constante de couple élevée de 13,5 N.m/A. Le courant
nominal est de 9,3A.
· La position initiale du rotor ne semble pas conditionner
la phase de démarrage du moteur FINTRONIC.
· L'ensemble mécanique du moteur manque de
rigidité. Il faut améliorer les moyens d'assemblage des 2 stators
et revoir le train de roulements du rotor qui laisse apparaître un jeu
néfaste sur l'entrefer.
· La forme d'ondes des tensions et des courants est
quasiment sinusoïdale. = Une commande du type "sinus" s'impose à ce
type de moteur.
· Une constante de couple élevée assure au
moteur une qualité certaine. Néanmoins, la forme des courants,
associée à une commande, devra être parfaite et
démunie de tout harmonique. Cette condition est nécessaire pour
éviter les à-coups de couple dépendants de cette
même constante de couple.
· La température atteinte du moteur, en
régime permanent, semble limite pour les matériaux
utilisés dans la conception du moteur. Les échauffements sont dus
essentiellement aux pertes magnétiques qu'il faut réduire au
mieux par l'intermédiaire de la commande.
· Une des qualités de ce moteur est d'être
conçu suivant une technique qui lui permet de recevoir plusieurs disques
"rotor" et d'augmenter ainsi ses possibilités de couple pour une
même structure de base.
· Peu de moteur, actuellement sur le marché,
sont capables de fournir d'aussi bonnes performances avec un encombrement et
une masse aussi faible. Le principe, utilisé dans la conception de ce
moteur, est judicieux (structure modulaire) et semble prometteur pour des
moteurs d'une puissance plus importante et pour des couples utiles plus
élevés (multi-disques).
· Les pertes magnétiques, apparus lors des
essais, ont faussé les résultats de la simulation d'environ 11% ?
Il faut inclure ces pertes dans le modèle mathématique.
Néanmoins, aux vues de la complexité du sujet, nous avons
préféré conserver le modèle tel que nous l'avons
défini précédemment. On précise que l'étude
d'une commande à couple maxi va permettre de limiter au mieux la tension
aux bornes du moteur. Ainsi, les pertes magnétiques seront
limitées d'autant et notre modèle se rapprochera mieux de la
réalité.
| 

