PARTIE III : REULATEUR A LOGIQUE FLOU A DEUX
ENTREES
Dans cette partie on va ajouter une deuxième
entrée a notre RLF c'est la dérivée de l'erreur (variation
de l'erreur) on lui donne le nom derreur sa fonction d'appartenance comporte
trois parties:
· se réchauffe
· constant
· se refroidit.
La fonction d'appartenance de la sortie sera divisée en
5 parties :
· Refroidir beaucoup : RB
· Refroidir : R
· OK
· Réchauffer : C
· Réchauffer beaucoup : CB
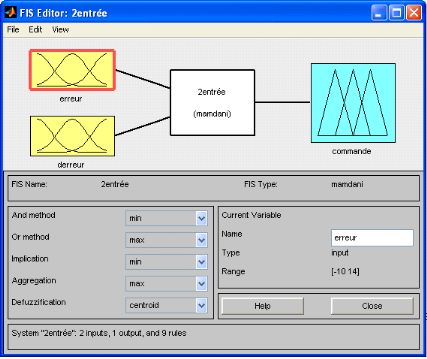
Figure 3.3.1 : Identification des entrées et des
sorties de l'RLF à deux entrées
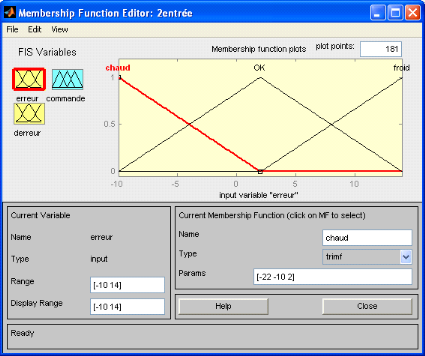
Figure 3.3.2 : fonction d'appartenance de
l'erreur
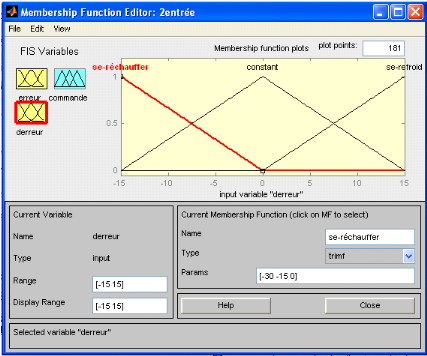
Figure 3.3.4 : fonction d'appartenance de la
dérivée de l'erreur
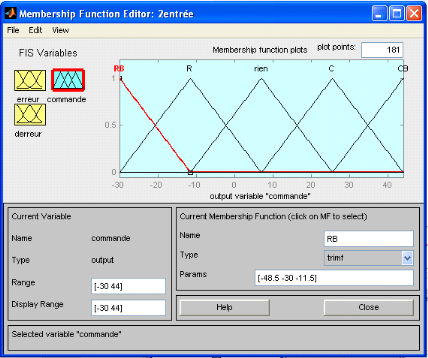
Figure 3.3.5 : fonction d'appartenance de la
commande
Apres avoir compléter le paramétrage des blocs
d'entrées et de sortie, on procède par l'élaboration des
règles logique qui répond au cahier des charges, et on les
implémente dans le bloc inférence
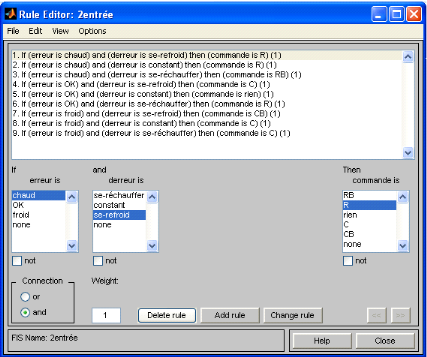
Figure 3.3.6 :Implémentation des règles
d'inférence
On finit par enregistrer le fichier (.fis) pour le charger par la
suite dans le workspace et le récupérer dans le bloc Fuzzy dans
simulink par le même nom du fichier enregistré.
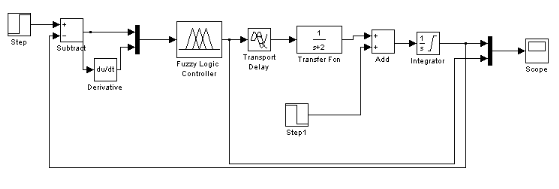
Figure 3.3.7 : Schéma blocs du système de
régulation de température par un RLF a 2 entrées
Une fois le régulateur est configuré, on simule et
on obtient la réponse suivante:
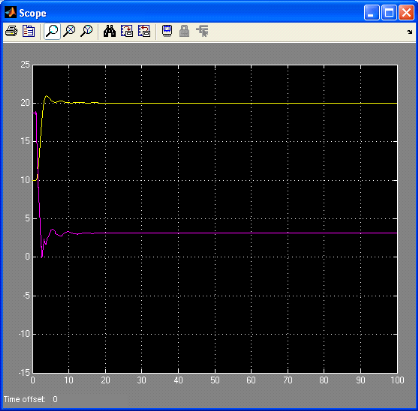
Figure 3.3.8: la commande et la réponse indicielle du
système simulé
Une réponse très forte en terme de rapidité,
stabilité et précision qui dépasse un régulateur a
logique flou utilisant une seule entrée
Cette réponse est obtenue également
après modification des plages de variations:
[-10 14] : l'erreur
[-15 15] : derreur
[-30 44] :
commande
Cette réponse présente Certainement un
dépassement mais sa rapidité est meilleure : son temps de
réponse est inférieur à celui du deuxième cas.
PARTIE IV : COMPARAISON ENTRE UN REGULATEUR CLASSIQUE PID
ET UN REGULATEUR A LOGIQUE FLOU
Notre étude a pour but de distinguer entre les avantages
et performances d'un régulateur classique PID et ce nouveau
régulateur a logique flou, dans cette partie en va relever les mesures
nécessaires pour pouvoir juger entre les 2 technologie pour cela on fixe
des intervalles +-5% de la réponse pour mesurer la rapidité
Et 10%, 90% du système pour étudier le temps de la
monté du système
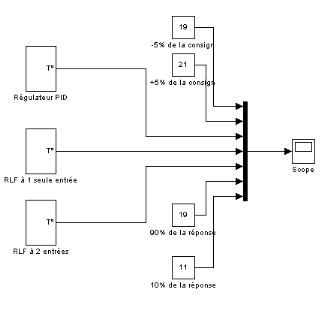
Figure 3.3.9: schéma blocs des différents
systèmes proposés
On Obtient les courbes suivantes :
Courbe bleu claire représente la réponse du
système avec un PID
Courbe rouge représente la réponse du
système avec un RLF a une seule entrée
Courbe verte représente la réponse du
système avec un RLF a deux entrées
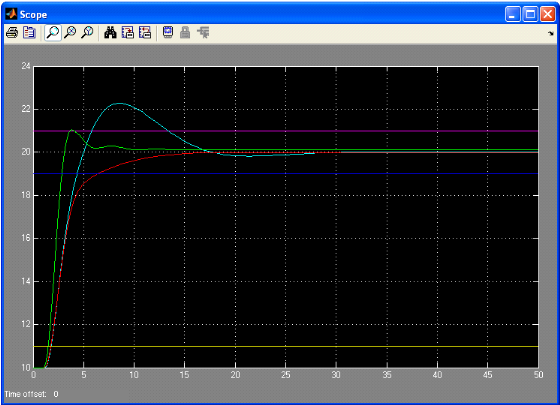
Figure 3.3.10: réponses des 3 systèmes
proposé
On obtient les mesures ci-dessous :
Ces mesures nous montre la performance du RLF par rapport au
régulateur classique PID, avec un temps de réponse et temps de
monté très réduit surtout le RLF a 2 entrées
|
Temps de réponse à 5% (sec)
|
Temps de montée (sec)
|
Dépassement %
|
Erreur (°C)
|
|
PID
|
13,329
|
11,546
|
11,10%
|
0
|
|
RLF 1 entrée
|
6.462
|
4,713
|
0%
|
0
|
|
RLF 2 entrées
|
4,053
|
2,562
|
5,21%
|
0,105
|
| 

