CHAPITRE III :
APPLICATION DE LA LOGIQUE FLOUE À LA
RÉGULATION DE LA TEMPÉRATURE
Cahier des charges
On présente le cas de réglage de la
température d'un four. Dans ce but on mesure la température avec
un capteur qui fournit la valeur de la grandeur à régler. On
suppose que le système a une fonction de transfère H(s)=1/(s+2)
avec un retard égale à un second.
C'est un système de contrôle de température
avec un élément de chauffage et de ventilation.
La température désirer est de 20°c.
La température extérieure est de 10°c et son
effet intervient au niveau de l'intégrateur.
Etapes a suivre :
1- modélise le système avec SIMULINK.
Sur la régulation d'un système pareille, on propose
3 solutions :
2-Premier cas : régulation PID
3-Deuxième cas : régulateur flou à une
seule entrée
4-Troisième cas : régulateur flou à
deux entrées
PARTIE I : REULATEUR PID
On introduit le système dans une boucle de
régulation avec correction proportionnel intégrale
dérivée PID, et ce avec les paramètres suivants :
Step=20°v; step1=-1.5°c; integrator: CI=10; Lower
saturation limit=10; transport delay=1; PID (1; 0; 1).
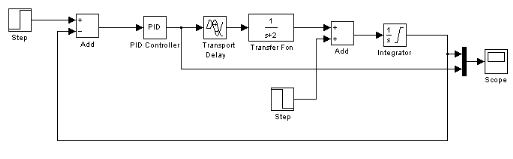
Fig3: Schéma bloc d'un system de
régulation de température par un PID
On retire les courbes de l'oscilloscope, la courbe jaune
représente la réponse du système en termes de
température,
La courbe en couleur mauve représente la commande du
système, sortie PID
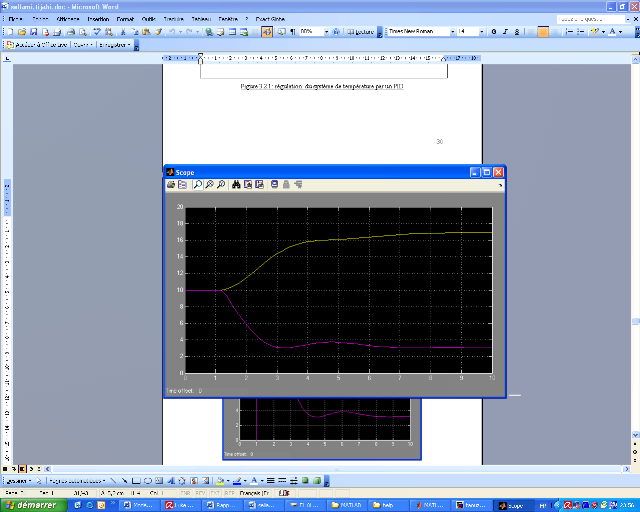
Figure 4 : la réponse et la commande du
système
On constate que notre système lui manque la
précision puisque la sortie n'atteint pas la consigne qui est 20°C,
avec un légère retard
En appliquant une perturbation sur ce system après un
délai de 60 second pour étudier la réponse en
régime permanent et en réagissent sur la performance I (0.2) on
s'aperçoit que le system devient plus rapide et que le PID a bien
corriger la mesure et la remettre a la consigne qui est 20°C (voir figure
5)
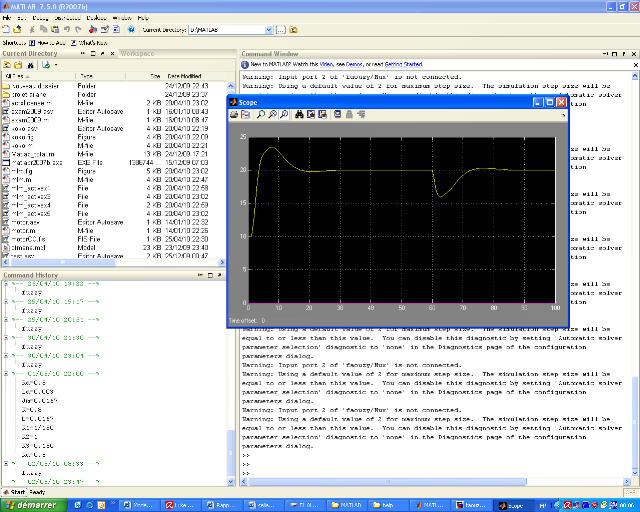
Figure 5 : la réponse et la commande
appliquant une perturbation a 60s
PARTIE II : REULATEUR A LOGIQUE FLOU A UNE SEULE
ENTREE
Nous allons changer notre régulateur classique PID par le
régulateur a logique flou avec une seule entrée, on commence tout
d'abord par définir les entrées et les sorties, et par la suite
on va essayer de lier les fonctions d'appartenances d'une façon logique
afin de réponde au cahier des charges.
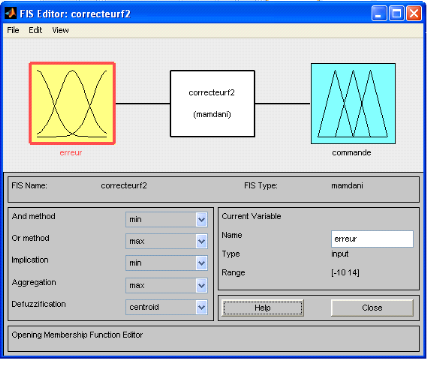
Figure 3.2.1 : création d'entrée et
sortie
Ensuite on définira les plages de variations (les
ensembles flous) et les fonctions d'appartenances pour l'entrée et la
sortie (figures 3.2.4, 3.2.5, 3.2.6), et on appellera chaque partie de la
fonction d'appartenance par un nom significatif. On aura alors : lorsque
l'erreur est négative (la température de sortie est
supérieure à la consigne), la fonction d'appartenance est
nommée chaud.
Lorsqu'elle est positive la fonction d'appartenance est
nommée froid, et la partie du milieu sera nommée rien.
La fonction d'appartenance d'erreur comporte trois
parties :
· Se réchauffe
· constant
· refroidit.
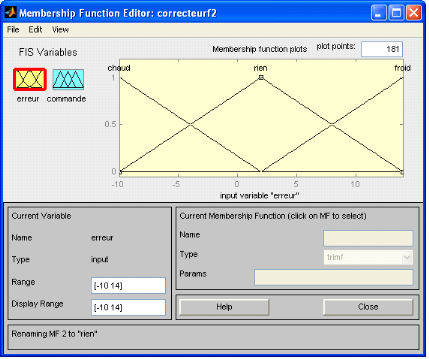
Figures 3.2.2 : fonction d'appartenance de
l'erreur.
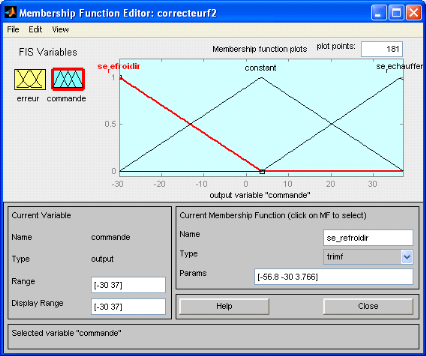
Figures 3.2.3 : fonction d'appartenance de la
commande
Après avoir définit les fonctions d'appartenance,
on va implémenter les règles d'inférences, de telle
façon à réaliser un cahier des charges, par exemple si le
système devient chaux le régulateur va automatiquement abaisser
la température pour garder la consigne voulus cela va être traduit
par la commande suivante :
If (erreur is chaud) then (commande is refroidir)
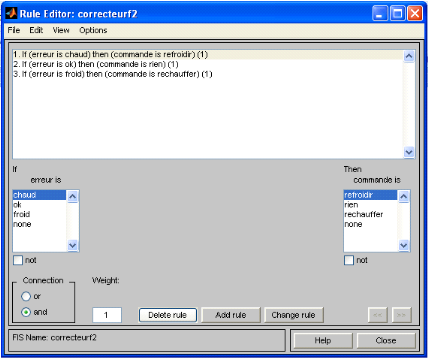
Figures 3.2.4: Implémentation des règles
d'inférence
Simulation du système par MATLAB
SIMULINK :
Modélisation du système sera défini sous
forme de ce schéma bloc introduit a simulink
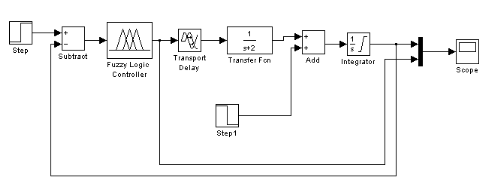
Figure 3.2.5 : Régulation du système de
température par un régulateur flou à une seule
entrée
Une fois le régulateur est chargé dans le bloc
Fuzzy du simulink, on simule le système et on obtient la réponse
suivante, la courbe jaune représente la réponse du
système, et la courbe mauve représente la commande issue du
régulateur RLF
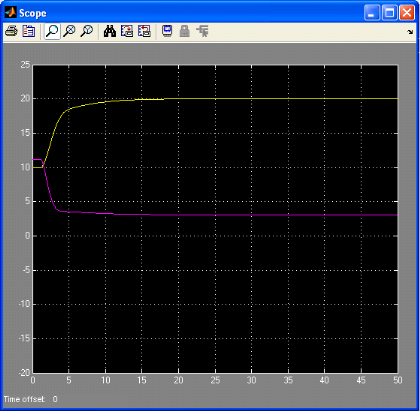
Figure 3.2.6 : la commande et la réponse
indicielle du système simulé
C'est une réponse qui atteint la consigne (20 °C). En
effet en variant les plages d'inférences on a augmenté
l'efficacité du régulateur autour de cette consigne. On pourrait
également modifier les règles d'inférences ou les formes
des fonctions d'appartenances utilisées, mais ceci suppose une
maîtrise du système à réguler.
| 

