Chapitre IV
Commande par flux orienté de la
machine asynchrone
Bloc de
découplage
Ia If
Inducteur
Induit
ids
iqs
MAS
IV.1 Introduction
Le diagnostic de la machine asynchrone dans le cas de
commande, est devenu très important, à cause du
développement qui a connu le milieu industriel surtout pour les
entraînements électriques.
Dans ce chapitre, on va voir l'influence des défauts
rotoriques sur le contrôle à flux orienté de la machine
asynchrone.
La machine asynchrone est difficilement commandable. La
difficulté réside dans le fait que
son modèle mathématique dans le repère de
Park est non linéaire multivariables est fortement couplé.
Dans la machine asynchrone, le couple
électromagnétique et le résultat d'une interaction entre
les courants imposés dans les enroulements du stator et les courants
induits dans le rotor en court-circuit. Ainsi, toute variation du couple par
variation du courant statorique se traduit aussi par une évolution du
flux induit dans le rotor.
Pour obtenir un contrôle dynamique performant du couple, il
faut, par un système de commande extérieur à la machine,
réaliser un découplage entre le couple et le flux.
Ce découplage des armatures statorique et rotorique de
la machine est réalisé en appliquant la commande par flux
orienté (commande vectorielle). Cette dernière a
été proposée en 1971 par Blaschke. Elle consiste à
séparer la commande du flux de celle du couple par orientation du flux
selon l'axe directe du repère (d, q).
Nous nous proposons dans ce chapitre d'étudier le
comportement de la machine asynchrone en commande vectorielle lorsqu'il se
produit des ruptures de barres.
IV.2 Principe de la commande vectorielle
IV.2.1 Description
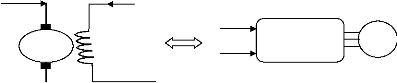
Le principe du découplage consiste à rendre le
contrôle de la machine asynchrone similaire à celui de la machine
à courant continu à excitation séparée; ceci peut
être réalisé en orientant le flux en quadrature avec le
couple (figure (IV.1)).
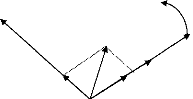
IV.2.2 Orientation du flux rotorique
On dissocie le courant statorique en deux composantes
ids et iqs en quadrature de telle sorte que le
courant ids soit orienté suivant l'axe du flux rotorique
(figure (IV.2)).
iqs
ids
ùs
q
d
is
Ör
Figure (IV.2): Orientation du flux rotorique.
Ainsi, en agissent sur les variables ids
et iqs , les grandeurs ö r et Cem
sont commandées séparément , cela se traduit par :
? ? ?
Ö = Ö
Ö
0
dr r (IV.1)
qr
Le modèle de la machine asynchrone avec orientation du
flux rotorique s'écrit :
d r
Ö Mi - Ö
ds
=
dt Tr
, r qs
C = Ö ,
em L r
pM i
i qs
ù = (IV.2)
sg T Ö
r
M
r
r
A flux rotorique constant, le couple dépend alors
uniquement du courant iqs.
| 

