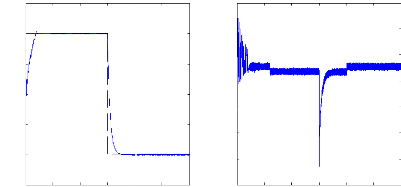
C- Cas d'une variation de charge
Les simulations reportées sur les figures (IV.20),
(IV.21) concernent un démarrage en charge de la MAS pour une
référence de vitesse de 0 à 1000 tr/mn avec variation du
couple de charge en régime établi suivi de l'inversion du sens de
rotation entre #177;1000tr/mn à t =1.5 s.
Pour 0.6s<t<3s, on applique un couple de charge de 3.5N.m
;
A l'instant t=2s, on applique un couple de charge
Cr=5.5N.m.
Ces résultats montrent que la commande vectorielle
indirecte appliquée à la machine asynchrone présentent des
performances fort intéressantes.
Lors changement brutal de la consigne, le régulateur PI
se trouve soumis à un écart de réglage très
important. La réaction de l'action proportionnelle, dont le but est de
réduire l'écart, risque de provoquer un grand
dépassement.
0 0.5 1 1.5 2 2.5 3
t(s )
0 0.5 1 1.5 2 2.5 3
t(s )
C em (11 .m )
-10
-20
-30
-40
30
20
10
0
b
II (trim n )
-1000
-1500
1500
1000
-500
500
0
a
Figure (IV.20) : Réponses de la machine asynchrone avec
variation de la charge lors d'une
inversion du sens de rotation : a) vitesse
de rotation et sa référence , b)
couple
électromagnétique
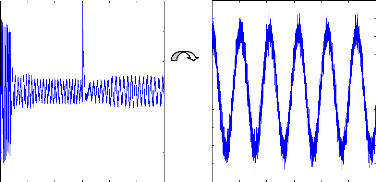
zoom
ias(A )
30 20 10 0
ias(A )
-10
-20
-30
0.5 1 1.5 2 2.5 3
t(s ) 5 4 3 2 1
0
-1
-2
-3
-4
-5
1 1.05 1.1 1.15 1.2 1.25 1.3
t(s )
Figure (IV.21) : Courant de phase statorique, variation de la
charge
IV.5Conclusion
La méthode du flux orienté appliquée sur
le modèle multi-enroulements de la machine asynchrone a cage
d'écureuil moyennant un réglage classique, nous a permis de
simuler le système, avec ou sans défauts rotoriques.
Les résultats obtenus montre l'influence des ruptures
de barres sur le couple électromagnétique, la vitesse de rotation
et le courant statorique, se traduit par des ondulations et déformations
des allures.
Il faut signaler que le régulateur P.I ne permet pas en
tout cas de maîtriser le régime transitoire. En outre, la
faiblesse de la commande vectorielle, se traduit par l'apparition d'une pointe
de courant très gênante pour le bon fonctionnement de la machine.
C'est les raisons pour lesquelles nous consacrons un chapitre pour
l'application d'un régulateur flou.
On s'intéresse dans ce qui suit à l'estimation des
états de la machine asynchrone par le filtre de kalman étendu,
afin de détecter les défauts rotoriques.
| 

