CHAPITRE 1
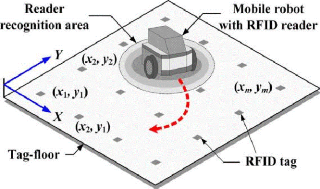
FIGURE 1.15 - Localisation par balises RFID [22]
formations. Ceci permet d'avoir un « point de vue externe
» lorsqu'un robot recalcule sa position pendant un déplacement.
Une autre difficulté liée au problème de
localisation est l'estimation exacte de la position du robot en utilisant des
informations incomplètes ou bruitées. En effet, les capteurs du
robot sont souvent limités et sujets à de petites erreurs, qui
peuvent rapidement s'accu-muler pour donner résultat à une
localisation incorrecte. Plusieurs méthodes ont été
utilisées dans la littérature pour améliorer la
localisation des robots en utilisant des informations visuelles recueillies
à partir de caméras comme l'identification de points
d'intérêts par exemple (portes, fenêtres, objets...) ou
l'utilisation de marqueurs placés préalablement dans
l'environnement (bornes, balises...) tel que décrit dans la figure
1.15.
Dans certains travaux, la localisation est externalisée
vers un serveur central lié à des caméras placées
en hauteur. C'est le cas lorsque les capacités de calcul des robots ne
permettent pas de faire un traitement assez complexe pour les besoins de
l'expérience.
1.4.4 La planification
La planification est une problématique très
importante dans le domaine de la robotique parce qu'elle est au centre du
processus décisionnel. Elle répond à la question : quelle
est la meilleure façon pour accomplir une certaine tâche?
Le but est de décomposer cette tâche en plusieurs
actions (ou sous-tâches) afin de choisir le meilleur ordre d'actions
parmi la liste des combinaisons possibles.
Dans un contexte multirobots, ce choix devient plus
compliqué puisqu'il faut répartir ces sous-tâches de
manière optimale sur plusieurs agents. Ceci correspond à un type
de problèmes mathématiques dont la complexité est
combinatoire (NP-complet) [54], il n'est donc pas toujours envisageable de
vérifier toutes les combinaisons possibles.
39
Dans un système centralisé, cette
répartition est généralement effectuée par le noeud
central qui affecte les tâches à chaque agent. Dans le cas d'un
système décentralisé ou distribué, un consensus
doit être trouvé par les robots pour se diviser les tâches
de sorte à maximiser le profit cumulé du groupe, même si
cela implique que les actions effectuées séparément par
chaque robot ne maximisent pas ses profits au plan individuel.
Lorsque le groupe est constitué de robots
hétérogènes, l'affectation de tâches doit aussi
prendre en considération leur capacités. En effet, certaines
tâches ne sont pas effectuées de la même manière par
tous les robots et il se pourrait que certaines tâches ne puissent
être réalisées que par un type spécifique de robots.
Il faudra donc veiller à inclure ces contraintes au processus
d'affectation.
Un type particulier de planification concerne le calcul de
chemins (path planning ou path finding en anglais). Il s'agit
d'un axe de recherche très actif qui vise à trouver le meilleur
ordre d'actions pour se déplacer d'un point A vers un point B. Ces
actions prennent la forme de mouvements, d'où l'appellation «
planification de mouvements » (motion planning). Il y a là
aussi des contraintes à prendre en compte telles que la présence
d'obstacles, la longueur du chemin choisi, ainsi que les restrictions
géométriques du robot.
La planification de chemins peut aussi prendre la forme de
répartitions de tâches dans les systèmes multirobots :
étant donné plusieurs points de destinations à visiter, le
but est de trouver la meilleure combinaison possible pour répartir ces
points de destination entre les robots de sorte que chaque point ne soit
visité que par un seul robot pour éviter la redondance. Ce type
de problèmes est populaire dans les applications de transport de
marchandises et de gestion des entrepôts.
Un autre aspect à prendre en compte lors de la
planification de chemins dans les systèmes multirobots est
l'évitement des collisions. Le critère du temps est très
important dans ce contexte puisqu'il n'est pas interdit que deux chemins se
chevauchent tant que deux robots ne sont pas présents au même
moment au même endroit. Il faut donc veiller à intégrer une
stratégie de gestion de conflits entre les robots, en gérant les
priorités de passage des robots par exemple ou en intégrant des
contraintes supplémentaires lors du calcul de chemins.
1.4.5 L'exploration
La tâche d'exploration consiste à parcourir une
zone dont le robot n'a aucune information au préalable (ou peu
d'informations). Le but est de collecter le maximum de données utiles
afin de pouvoir mener à bien la mission.
La problématique d'exploration peut devenir
particulièrement difficile avec l'augmen-tation de la surface de la zone
à parcourir et des contraintes de mouvement et d'énergie du
robot. Ceci devient particulièrement critique lorsque le facteur temps
est limité en raison de nature même de la mission, comme les
opérations de sauvetage et recherches de personnes pendant les
catastrophes naturelles par exemple.
40
| 

