CHAPITRE 1
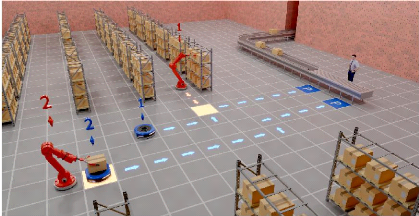
FIGURE 1.16 - Simulation d'un scénario industriel
basé sur les algorithmes de planification de trajectoires [42]
La tâche d'exploration est souvent couplée avec
d'autres problématiques selon la nature de la mission. Ceci ouvre la
possibilité à plusieurs variantes que nous pouvons classer selon
les catégories suivantes:
-- Exploration: Consiste à visiter une zone inconnue
dans le but de collecter le maximum de données possibles, souvent sous
forme de positions de points d'intérêts ou d'ensemble de routes et
chemins possibles.
-- Target Searching: Consiste à explorer une zone dans
le but de trouver un individu
ou un certain objet.
-- Patroling : Consiste à explorer une zone de
manière répétitive, souvent dans le but de
détecter des intrus dans un contexte de surveillance.
-- Consistent Surveillance (Consistent Monitoring): Consiste
à surveiller une zone de
sorte que chaque point de l'environnement soit toujours dans
le champ de vision des robots. Le but est de déployer les robots de
sorte qu'aucun angle mort ne soit toléré.
-- Total Coverage (Complete Coverage) : Consiste à faire
le balayage complet d'une zone, c'est à dire l'explorer en visitant tous
les points atteignables par les robots. On ne se contente pas d'observer et
détecter les obstacles à distance, mais de se déplacer et
parcourir chaque petite parcelle de la surface de la zone dans le but de la
nettoyer par exemple, ou détecter la présence de danger (mines,
fuite de gaz...).
La problématique d'exploration avec ses
différentes variantes est une tâche qu'on peut décomposer
en plusieurs sous-tâches. En effet, plusieurs stratégies peuvent
être employées pour répartir cet ensemble de
sous-tâches sur un groupe de robots afin d'accélérer sa
réalisation.
La stratégie la plus intuitive est de diviser la zone
à parcourir en plusieurs régions, puis d'affecter à chaque
robot une ou plusieurs régions à explorer. Le problème se
transforme donc en un problème d'affectation pouvant prendre en compte
un ou plusieurs critères
41
d'optimisation, tel que la distance du robot par rapport à
la région affectée, la taille de la région, ou encore
l'énergie restante du robot.
Toutefois, ceci soulève aussi plusieurs questions : quel
est le nombre optimal de régions? Quelle est la forme des
régions? Quel type de trajectoire faut-il utiliser?
Les réponses à ces questions varient selon la
nature de la mission et des techniques à utiliser. Les figures 1.17 et
1.18 montrent des exemples de ce genre de décisions dans deux
scénarios différents.
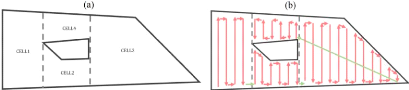
FIGURE 1.17 - Exemple de décomposition d'une carte et
balayage en utilisant une trajectoire en zigzag [48]
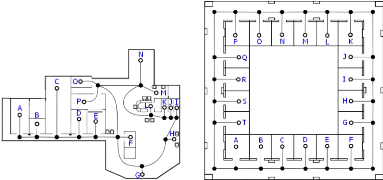
FIGURE 1.18 - Exemple de sélection de régions
à visiter dans un scénario de surveillance [49]
Une stratégie d'exploration efficace poussera les
robots à minimiser le chevauchement entre les régions
visitées et éviter de retourner par le même chemin, sauf si
cela est inévitable comme lorsqu'un robot atteint une route
fermée et doit faire demi-tour, ou dans le cas d'une intersection de
plusieurs chemins (ex : couloir, hall).
42
| 

