CHAPITRE 1
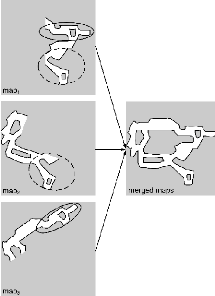
FIGURE 1.13 - Résultat d'un processus
de fusion de cartes [74]
Les cartes sont aussi un moyen de communication avec
l'être humain, car elles permettent à un opérateur de
facilement comprendre la structure de l'environnement et visualiser
l'état d'avancement d'une mission. Aussi, il sera plus facile de
sélectionner graphiquement des points sur une carte pour
délimiter une région d'intérêt, que d'insérer
un ensemble de coordonnées dans un tableau.
1.4.3 La localisation
Dans la problématique de localisation, le but est de
répondre à la question « où est le robot? ». On
s'intéresse ici à connaître la position du robot par
rapport à un repaire fixe.
Étant donné la nature incertaine de
l'environnement en général, cette position est souvent
estimée selon une certaine probabilité en se
référant à des objets externes, bien qu'il soit possible
d'estimer sa position en utilisant des informations internes telles que la
vitesse de déplacement du robot et son orientation.
La position d'un robot qui se déplace sur une surface
2D (sol par exemple) est déterminée par deux coordonnées
(x, y) et une orientation définie par un angle è. D'un autre
côté, un robot qui se déplace sur un espace 3D (robot
volant par exemple), nécessite l'utilisation de trois coordonnées
(x, y, z) pour déterminer sa position, et trois angles pour
déterminer son orientation (á, â, ã). Ces
coordonnées définissent la position du robot par rapport à
un certain repère.
37
Dans les applications réelles de robotique, il est
fréquent d'utiliser plusieurs repères pour le calcul des
positions. L'un d'entre eux -appelé repère global- est un
repère de référence fixe qui sert à calculer la
position du robot par rapport au monde qui l'entoure, ce qui permet d'effectuer
l'opération de cartographie.
De manière opposée, un repère mobile dont
le point d'origine est la position du robot est utilisé pour
déterminer la position relative des obstacles en utilisant la distance
mesurée par ses capteurs, ce qui est particulièrement utile
pendant la phase de navigation pour éviter les collisions. La position
de ces obstacles est ensuite recalculée par rapport au repère
fixe afin de pouvoir déterminer leurs positions réelles dans la
carte de l'environnement. Nous remarquons donc que les problématiques de
navigation, de localisation et de cartographie sont fortement liées.
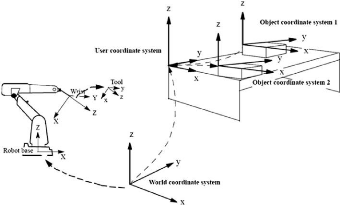
FIGURE 1.14 - Schématisation des différents
repères utilisés pour la localisation relative et globale [29]
Le choix du point d'origine pour un repère de
référence présente lui aussi son lot de
difficultés. Dans un environnement contrôlé, ce point peut
être défini par l'utilisateur et sera utilisé pour
positionner tout objet modélisé dans l'environnement. Toutefois,
ceci n'est pas toujours possible dans le cas où le robot est
déployé dans un environnement inconnu au préalable. Il est
donc plus judicieux de fixer la position initiale du robot comme point de
référence.
Dans un contexte multirobots, ceci devient plus difficile
puisque chaque robot possède son propre point de
référence. Il est donc important que ces robots synchronisent
leurs positions par rapport à un repère commun comme la
sélection d'un objet fixe comme point de référence ou en
utilisant un moyen de localisation externe, telle que la
géolocalisation.
Certains travaux ont démontré que
l'échange des positions des robots entre eux permettrait aussi de
réduire les erreurs dans leur localisation. Pour cela, chaque robot
détermine la position de l'autre robot lorsque celui-ci rentre dans son
champ de vision, puis la lui envoie. Celui-ci comparera la valeur reçue
avec celle calculée en utilisant ses propres in-
38
| 

