CHAPITRE 1
34
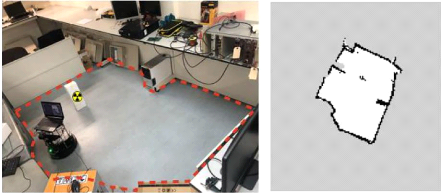
FIGURE 1.10 - Exemple d'une carte métrique 2D
construite en utilisant la technique des grilles d'occupations [1]

FIGURE 1.11 - Exemples de cartes métriques 3D
Cartes topologiques
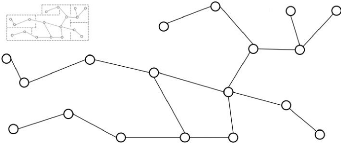
Elles sont le résultat de la représentation de
l'environnement sous forme de graphe. Ce type de cartes est plus indulgent
quant à l'erreur dans la position exacte du robot puisque
l'environnement est plutôt schématisé sous forme de graphe.
Pour y arriver, cet environnement est d'abord divisé en plusieurs
régions, qui sont par la suite représentées par des
noeuds, puis reliées entre elles par des arêtes
représentant les chemins possibles pour se déplacer d'une
région à une autre.
Ces cartes sont plus difficiles à construire et
à mettre à jour comparé aux cartes métriques, mais
elles sont plus adaptées d'un point de vue algorithmique à la
planification de chemins à long terme et à la distribution de
tâches entre plusieurs robots. De plus, elles ont l'avantage de consommer
moins d'espace mémoire.
Les cartes topologiques peuvent être enrichies
d'informations supplémentaires comme la distance entre les noeuds ou la
densité d'occupation (pourcentage du nombre d'obstacles
35
FIGURE 1.12 - Exemple d'une carte topologique
par rapport à la surface de l'espace vide). Ces
informations peuvent s'avérer utiles pour la recherche du chemin optimal
entre deux points.
Elles peuvent être aussi être combinées
avec des cartes métriques afin de profiter des avantages des deux types.
La partie métrique sera utilisée pour la navigation à
court terme tandis que la partie topologique sera utilisée pour la
planification à long terme.
La cartographie dans un contexte multirobots
Dans un contexte multirobots, les cartes sont utilisées
comme moyen de communication et de coordination. En combinant les observations
partielles récoltées par chaque robot nous obtenons une carte
complète de l'environnement.
Cette carte est souvent construite dans une machine centrale.
Au début, chaque robot construira sa propre carte locale à partir
des observations qu'il enregistre. Ces cartes sont ensuite envoyées au
serveur pour les combiner dans une seule carte globale. Plusieurs techniques
existent pour effectuer cette combinaison comme la corrélation de scans,
la superposition de cartes, ou la fusion de graphes.
Cette opération peut être difficile surtout
lorsque la position des robots n'est pas connue avec précision, ou
lorsque les observations sont bruitées à cause de capteurs de
mauvaise qualité, ce qui peut induire à des inconsistances dans
la carte globale.
Le facteur temps est également important, deux robots
peuvent passer par un même endroit, mais générer quand
même deux cartes différentes si la position des obstacles a
changé entre temps. Il sera donc encore plus difficile de les superposer
sans avoir recours à des informations supplémentaires comme le
temps de passage de chaque robot ou la position de points de repères.
Un autre défi concerne la manière de fusionner
des cartes construites par une équipe de robots
hétérogènes. Puisque des robots différents peuvent
avoir des capteurs différents ou des points de vue différents
(robot aérien et robot terrestre par exemple), il faudra veiller
à transformer leurs observations vers un format uniforme qui facilitera
la fusion des cartes.
36
| 

