I.5. Description général du quadrotor
:
Un quadrotor est un robot mobile aérien à
quatre rotors définit par six degrés de liberté dans
l'espace (3 axes X, Y, Z) Figure 17. [1-2]. Ces 4 rotors sont
généralement placés aux extrémités d'une
croix, et l'électronique de contrôle est habituellement
placée au centre de la croix. Afin d'éviter à l'appareil
de tourner sur lui-même sur son axe de lacet, il est nécessaire
que deux hélices tournent dans un sens, et les deux autres dans l'autre
sens. Pour pouvoir diriger l'appareil, il frauder que chaque couple
d'hélice tournant dans le même sens soit placé aux
extrémités opposées d'une branche de la croix. Le
fonctionnement d'un quadrotor est assez particulier.
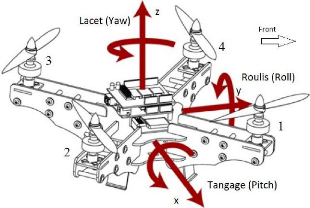
Figure 1.7 : Les mouvements de bases du
quadrotor.
En faisant varier astucieusement la puissance des moteurs, il
est possible de le faire monter/descendre, de l'incliner à gauche/droite
(roulis) ou en avant/arrière (tangage) ou encore de le faire pivoter sur
lui-même (lacet) [3], le quadrotor a six degrés de
libertés, trois mouvements de rotation et trois mouvements de
translation, ces six degrés doivent être commandés à
l'aide de quatre déclencheurs
Chapitre I Généralité sur les
drones
11
Chapitre I Généralité sur les
drones
12
seulement; Donc c'est un système sous actionné
(le nombre des entrées inférieure au nombre des sorties).
I.6. Les mouvements du quadrotor :
Dans les hélicoptères classiques, quand le
rotor principal tourne, il produit un couple réactif qui inciterait le
corps de l'hélicoptère à tourner dans la direction
opposée si ce couple n'est pas contrarié. Ceci est habituellement
fait en ajoutant un rotor de queue qui produit une poussée dans une
direction latérale. Cependant, ce rotor avec son alimentation
électrique associée ne fait aucune contribution à la
poussée. Par contre, en cas de quadrotor, le rotor droit et le rotor
gauche tournent dans le sens des aiguilles d'une montre et dans la direction
opposée les rotors avant et arrière, ceci neutralise
effectivement le couple réactif non désiré et permet au
véhicule de planer sans tourner hors de la commande. D'ailleurs,
différemment aux hélicoptères classiques, toute
l'énergie dépensée pour contrecarrer le mouvement de
rotation contribue à la force de poussée [4-11].
Les mouvements de base de quadrotor sont
réalisés en variant la vitesse de chaque rotor changeant de ce
fait la poussée produite. Le quadrotor incline vers la direction du
rotor plus lent, qui tient compte alors de la translation le long de cet axe.
Par conséquent, comme à un hélicoptère classique,
les mouvements sont couplés, signifiant que le quadrotor ne peut pas
réaliser la translation sans roulement ou tangage, ce qui signifie qu'un
changement de la vitesse d'un rotor se traduit dans un mouvement en au moins
trois degrés de liberté. Par exemple, augmentant la vitesse de
propulseur gauche aura comme conséquence un mouvement de roulis (le
quadrotor incline vers le rotor plus lent, vers la droite), un mouvement de
lacet (l'équilibre entres les rotors qui tourne dans le sens des
aiguilles d'une montre et les rotors qui tourne dans le sens inverse est
perturbé ayant pour résultat un mouvement de rotation
horizontal), et une translation (le mouvement de roulis incline l'armature et
avec lui, l'orientation de la force de poussée). Cet accouplement est la
raison pour laquelle nous pouvons commander les six degrés de
liberté de quadrotor avec seulement quatre commandes (le couple
appliqué par les moteurs sur chaque propulseur).
Le quadrotor a cinq mouvements principaux :
Mouvement vertical (Throttle), Mouvement de
roulis (Roll), Mouvement de tangage (Pitch),
Mouvement de lacet (Yaw) et Translations horizontales.
I.6.1. Le mouvement vertical (Throttle) :
Afin de planer, toute la force de portance devrait seulement
être le long de l'axe z avec une grandeur exactement opposée
à la force de pesanteur. D'ailleurs, la force de portance crée
par chaque rotor doit être égale pour empêcher le
véhicule de renverser plus. Par conséquent, la poussée
produite par chaque rotor doit être identique.
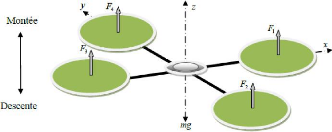
Figure 1.8 : Illustration du mouvement vertical
(Throttle).
Le mouvement ascendant et descendant est obtenu par la
variation de la vitesse de rotation des moteurs (par conséquence la
poussée produite), si la force de portance est supérieure au
poids du quadrotor le mouvement est ascendant, et si la force de portance est
inférieure au poids du quadrotor le mouvement est descendant.
| 

