2. THEORIE DE REGLAGE DES PROCESSUS DYNAMIQUES
I.2.1. Processus dynamique
Le processus dynamique est caractérisé par des
phénomènes possédant une variation continue en fonction du
temps. Il se déroule en principe dans le système analogique.
Les variables en jeu sont des grandeurs physiques
analogiques ; et comme modèle mathématique pour la
description de ces processus, on fait appel soit à des équations
différentielles soit à des équations d'état ou soit
encore à des fonctions de transfert.
2.2. Conduite de processus
La notion des conduites de processus est importante dans le
domaine d'automatisation. La conduite de processus se compose en
général de plusieurs fonctions à savoir :
ü La surveillance
ü Le traitement des données
ü Commandes logiques et analogiques
ü Les organes de réglage
a) La surveillance
Consiste à vérifier continuellement ou
périodiquement, l'état des certaines grandeurs qui sont
déterminant pour le bon fonctionnement d'une installation.
Lors de la détection d'un état
indésirable, la surveillance doit déclencher un avertissement
(alarme) ou provoquer une intervention sur la commande et réglage, cette
surveillance est assurée grâce à un traitement des
données qui consiste à visualiser les grandeurs
intéressantes.
b) Le réglage
Le schéma de réglage est de la forme
suivante :
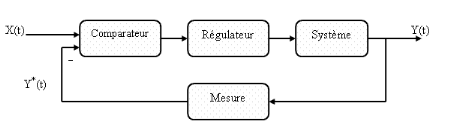
Figure I.1 : Diagramme fonctionnel de la
chaîne de réglage.
Légende :
X(t) : variable d'entrée
Y(t) : variable de sortie
Y*(t) : grandeur mesurée
La chaîne de réglage est constituée
de :
Ø La partie commande ou régulateur qui se
compose d'un régulateur déterminant l'écart entre la
consigne et la mesure d'un correcteur qui élabore à partir d'un
signal d'erreur l'ordre de commande.
Ø D'un actionneur, l'organe d'action qui apporte
l'énergie au système pour produire l'effet souhaité.
Ø Le capteur qui prélève sur le
système la grandeur réglée, l'information physique et le
transforme en un signal compréhensible par le régulateur.
Les informations que donnent l'organe de réglage se
présentent sous forme de :
· La consigne qui est la grandeur réglante du
système ;
· La sortie réglée, présente le
phénomène physique que doit régler le système.
C'est la raison d'être du système ;
· Les perturbations sont l'ensemble de tout
phénomène physique qui intervient sur le système et
modifie l'état de sortie
· L'écart est la différence entre la sortie
et la consigne.
| 

