IV. Résultat [9]
Pour la modélisation de la prothèse de main, on
fait l'assemblage juste à la fin. Donc on doit commencer à
modéliser la phalange, en suite le doigt en entièreté et
en fin de la main qui constitue notre prothèse. Mais il ne reste
qu'à signaler que l'ordre du commencement, dépend de chaque
personne.
La structure ci-dessous montre les étapes qu'on aura
besoin pour la modélisation de notre prothèse :
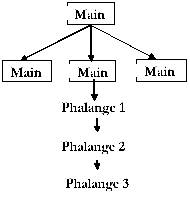
Figure IV.4. Etapes de modélisation de la
prothèse
IV.4.1. Modélisation de
la phalange
Pour modéliser une phalange, il faut préciser la
taille de ce dernier, préciser la longueur, la largeur ainsi que son
volume et en fin préciser l'angle qui va le séparer avec d'autres
phalanges.
Voici une représentation de la phalange du pouce et
celui de l'index. Pour les autres il suffit de faire la duplication et
préciser la taille.
 
Figure IV.5. Phalange de l'indexet du
pouce
IV.4.2. Modélisation de
la paume
Pour mieux faire les choses, on cherche à bien faire
l'angle séparateur des doigts, ainsi que la taille de la paume. Au
niveau de la paume, il faut aussi détailler la circonférence dans
la quel on va enfoncer la main. Il ne nous reste à vous signaler que le
réassemblage de tous les phalanges, doit respecter la jointure pour
créer l'articulation.
En mode édite (Ce mode permet la modification de l'objet),
voilà ce que ça donne :
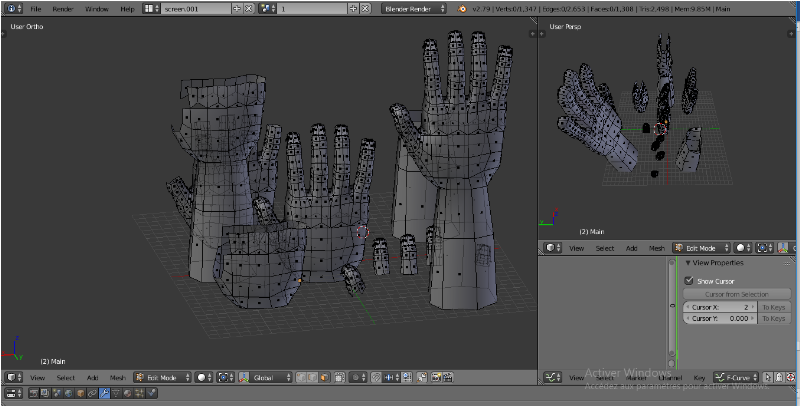
Figure IV.6. Visualisation de la prothèse en
mode Edite.
On peut aussi voir ça en Mode Objet (Le mode qui permet
de visualiser l'objet qu'on a modélisé) :
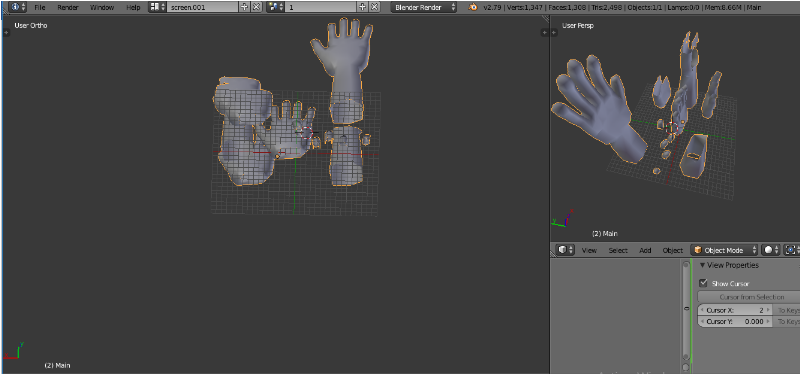
Figure IV.7. Visualisation de la prothèse en
mode Objet.
En suit, on doit voir la vue de face de la
prothèse :
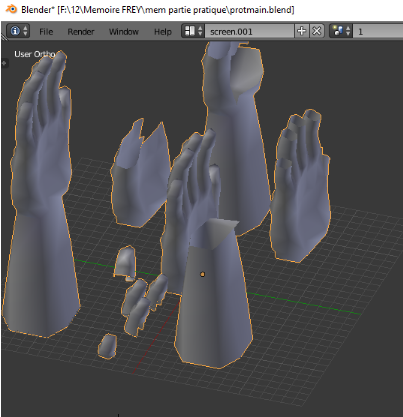
Figure IV.8. Vue de face de la prothèse en
mode Object.
Et on pourrait voir la vue Interne de la prothèse en mode
Object :
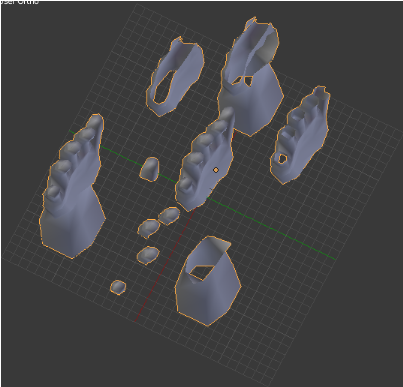
Figure IV.9. Vue Interne de la prothèse en
mode Object.
IV.4.3. La prothèse
Après réassemblage
Le réassemblage de la nôtre prothèse
consiste à mettre ensemble tous ce qu'on a pu modéliser
séparément ; Et là, on verra plus de l'importance du
moteur de rendu qu'on a pu expliciter et donner son importance dans le chapitre
premier de notre travail.
Donc on réassemble tous les doigts à la paume de
main afin de l'attacher au poignet de la main pour enfin voir notre
prothèse modéliser.
En mode Edition, voilà ce que ça nous donne
comme résultat en deux dimensions:
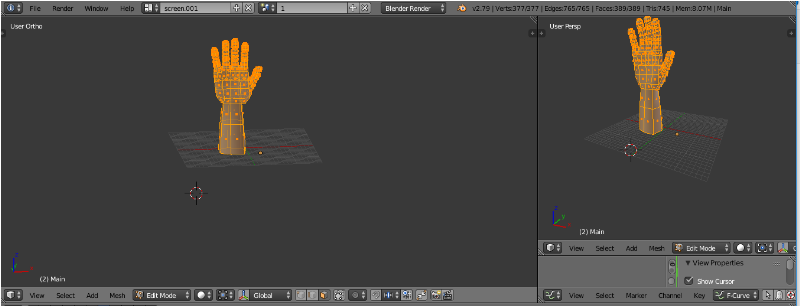
Figure IV.10. Vue finale de la prothèse en
mode Edition sous format 2D.
Et quand on quitte du mode édite au mode objet, nous avons
ce qui suit toujours en format 2D :
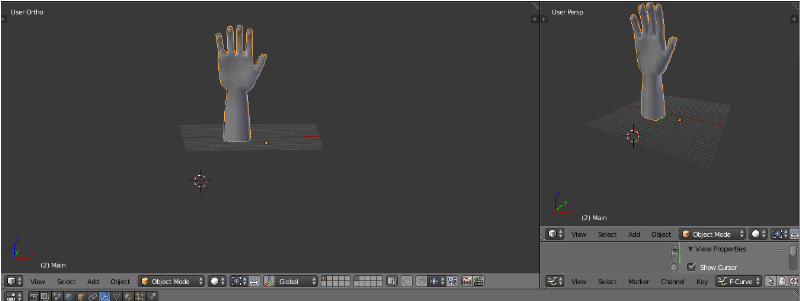
Figure IV.11. Vue finale de la prothèse en
mode Object sous format 2D.
Grace à l'affiche qui suis, qu'on pourrait voir au moins
les trois axes qui forment notre prothèse :
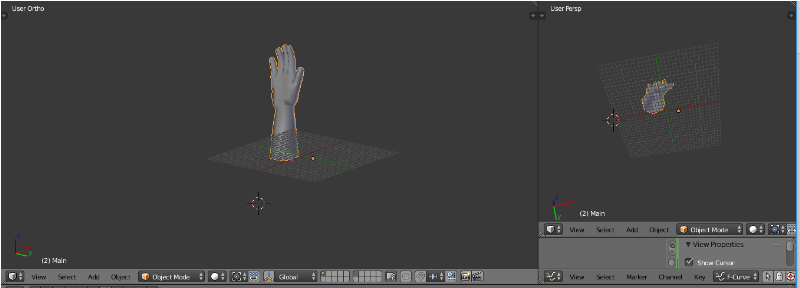
Figure IV.12. Vue finale de la prothèse en
mode Object sous format 3D.
Au final, pour voir si notre modélisation a
été bien fait, nous devons la placer sur le plateau d'impression
avec le logiciel CURA avec l'extension .stl. Si elle est entourée de la
couleur bleue, donc notre modélisation est parfaite. Et ce logiciel nous
aidera à la précision sur l'heure que ça va prendre au
moment d'impression et le montant. Pour cette version d'essai, elle coute 24$
avec 24g de filament pour l'imprimer et elle va durer 06h26min d'impression vu
qu'on a réduit la qualité et le volume.
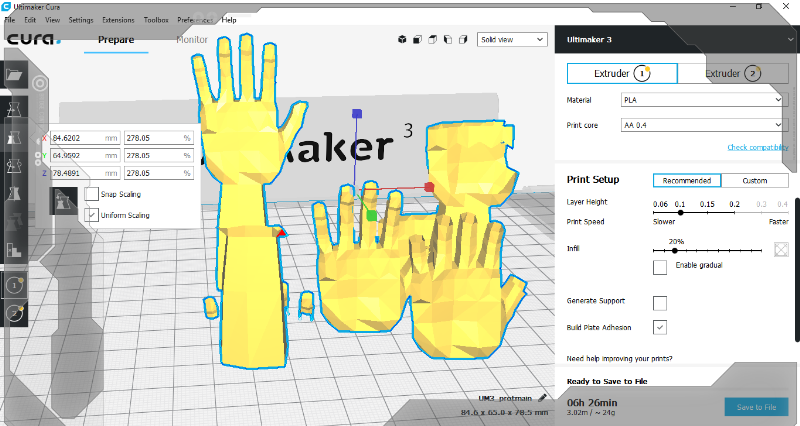
Figure IV.13. Vue sur le plateau
d'impression.
Note :
Comme nous l'avons dit dans l'introduction de notre travail,
notre prothèse qui a été très bien
modéliser, a comme importance de permettre aux personnes vivant avec
handicap de retrouver le sourire.
Alors, il ne reste qu'à signaler : ce dernier a
des particularités qui la diffère des autres qui existent
déjà comme :
ü Notre prothèse permet à ce que les
personnes qui vont la porter, puisse faire de mouvement qui sont semblable
à la main naturelle par exemple fermer un coup de pointe. Ce qui
n'était pas le cas avec les prothèses
précédentes ;
ü Elle imite la réalité. Avec cette
prothèse, une personne qui la met, peut même oublier qu'elle a une
main artificielle ;
ü Au lieu de se déplacer pour en procurer, on va
le faire d'une manière locale et à un prix minime par rapport
à quand vous vous déplacer.
| 

