2.5.1 Génération de résidus par
estimation d'état
La présence d'un défaut affectant l'une des
variable provoque un changement dans les corrélations entre les
variables indiquant une situation inhabituelle, les relations entre les
variables ne seront plus vérifiées.
La projection du vecteur de mesures dans le sous-espace des
résidus va croitre par rapport à sa valeur dans les conditions
normales, et le défaut nous sera alors visible, pour détecter un
tel changement dans les corrélation entre les différentes
variables, l'ACP utilise plusieurs indices,notamment La statistique SPE, ou
T2de Hotelling.
Détection de défauts Analyse en composantes
principales
19
Une fois le nombre de composantes à retenir est
déterminé, la matrice X peut être approximée
à partir des l premières composantes principale qui correspondent
au l plus
grandes valeurs propres de la matrice :
|
Xà =
|
Xl i=1
|
TipT i =
|
Xl i=1
|
XpipT i
|
La matrice des vecteurs propres et la matrice des composantes
principales peuvent
|
être décomposées en deux sous-matrices : P
= [ Pà P] et T = [
|
Tà T ]
|
Où:
P à et
T àreprésentent les matrices des l
premiers vecteurs propres qui correspondent aux l premières composantes
principale, et l'inverse pour P et T représentent les matrices des (m
- l) vecteurs propres qui correspondent aux dernières composantes
principales. Sachant que TN×m est
donnée par:
T = X P = X [ Pà P]
On peut dire ainsi que:
Tà = X Pà
Et :
Xà = Tà Pà T
T àreprésente la projection de X sur l
les premiers vecteurs propre de .
T = X P
Et :
X = T P T
Où:
T représente la projection de X sur les (m - l) derniers
vecteurs propres. X représente la matrice des résidus qu'on
notera E.
Détection de défauts Analyse en composantes
principales
20
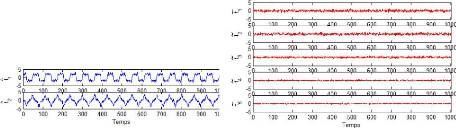
Figure 2.8 - Évolution de La projection de X sur les
premiers (l) et dernièrs (m - l)
vecteurs propre de E
La décomposition de la matrice X donnera :
X = Xà + X = Xà + E
On note :
E = X C et Xà = X Cà
Oû:
Cà= PàPàT
et C = (I - Cà)
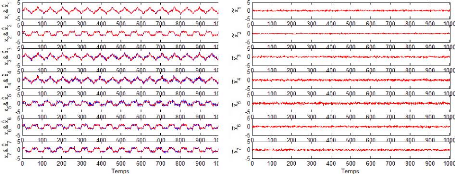
Figure 2.9 - Comparaison entre X et son estimation
Xà à partir des l premières
composantes
principale
Détection de défauts Analyse en
composantes principales
2.5.2 Statistique SPE
L'indicateur de détection SPE (Squared Prediction
Error) réalise la détection de défauts dans l'espace
résiduel. A l'instant k, il est donnépar :
SPE (k) = k1 (k)k 2 = xTx = Êm
~x2j(k)
j=1
Le processus est considéréen fonctionnement
anormal (présence d'un défaut) à l'instant ksi:
SPE (k) > ä2á
Oùä2 est le seuil de détection du
SPE(k) qui est approximépar : :
|
" 2
cá V2è2h6 è2h0(h0 - 1)
äá = è1 è1 + 1 +
è2
1
|
1 h0
|
Soit :
Pour i=1,2,3 et ëi est la jemme valeur
propre de la matrice E .
|
Où: h0 = 1 - 2è1è3
3è2 2 et Cá =
|
[(11e112)h0-1-è2h0(hè20-1
1
|
|
v2è2h2
0
|
|
Cá est la limite au seuil de confiance (1 -
á).
21
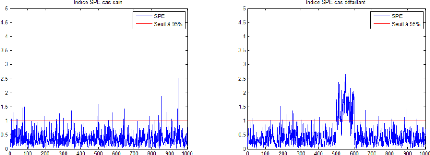
Figure 2.10 - Indice SPE dans le cas sain et le cas
défaillant avec un seuil de 95%
Détection de défauts Analyse en composantes
principales
| 

