Analyse du comportement de la servovalve electro-hydraulique lors de freinage des roues d'un avion (cas de Boeing 737-NG)( Télécharger le fichier original )par Charly MENGAWAKU JEAN Institut supérieur de techniques appliquées - Ingénieur technicien en mécanique 2010 |

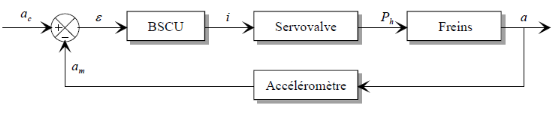
IV.4. Schéma fonctionnel du système de freinage des roues d'un avion
Figure 4.2. La boucle d'asservissement
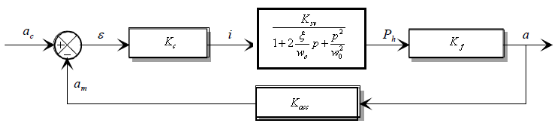
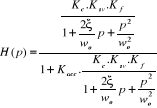
Figure 4.3. Schéma bloc D'où la fonction de transfert en boucle fermée du système s'écrira :
Cherchons le dénominateur commun :
Posons :
D'où l'équation de la fonction de transfert en boucle fermée devient :
IV.5. Comportement du système de freinage en boucle ferméeDans ce point, nous allons faire l'analyse du système, voir si le système est performant (stable, précis, et rapide), ou non pour le corriger. (16(*)) IV.5.1. Calcul de stabilité du système en boucle ferméeLa théorie enseigne que, un système du second ordre sera toujours stable en boucle ouverte qu'en boucle fermée lorsque la branche retour est constituée que par un gain.
Parmi les critères de stabilité, nous avons utilisés le critère de Routh qui dit :: Si tous les termes de la première colonne sont strictement positifs, le système est stable. S'il y a changements de signes dans la première colonne, l'équation caractéristique à parties réelles positives (et le système est instable).
Or, nous avons posé :
et
Le système est bel et bien stable à
condition que : C'est-à-dire : IV.5.2. Calcul de la précision du système en boucle ferméeIV.5.2.1. Erreur statique ou erreur de position
Dans ce cas :
Calculons l'erreur de position à l'entrée
Echelon unitaire E(p)=
Or, nous avons posés :
Cette précision peut être régler
avec : K0.Kacc, donc il faut maximiser : Plus que l'erreur est petite, la précision sera meilleur. Hypothèse 5 Si l'accéléromètre est de gain unité (Kacc = 1) Avec :
Donnons des valeurs à K0 Avec : K0 = 1 : K0 = 9 : K0 = 19 : K0 = 99 : * 16 G. Rabie and M. Lebrun, "Modélisation par Les Graphes à Liens et Simulation d'une Servovalve Electrohydraulique à Deux Etages", R.A.I.R.O Automatique Systems Analysis and Control, vol. 15, n°2, 1981, pp. 97-129. |
|


 (4.8)
(4.8) (4.9)
(4.9) (4.10)
(4.10) (4.11)
(4.11) (4.12)
(4.12)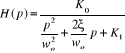 (4.13)
(4.13)

 0 (4.14)
0 (4.14) 0
0

 0
0  0
0 
 (4.15)
(4.15) (4.16)
(4.16) (4.17)
(4.17) (4.18)
(4.18) (4.19)
(4.19)
 (4.20)
(4.20) (4.21)
(4.21)
 (4.22)
(4.22) .
. (4.23)
(4.23) = 50 %
= 50 % = 10 %
= 10 % = 5 %
= 5 % = 1 %
= 1 %