IV.2-Illustration du decouplage de la comman de des axes d
et q
- Pour 0 < t = 0,5 s, les consignes
I IsdREF et IIsqREF sont respectivement
fixées à 2,5A et 0. - Pour 0,5 < t = 1s , on
procède à un échelon de IIsqREF = 8 A ,
sans modifier I IsdREF .
- Pour t > 1 s , on ramène la
consigne IIsqREF à 4A.
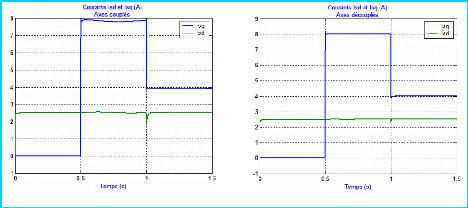
a- Axes d et
q co uples b- Axes d et
q d:couples
Figure 2-14 : Boucle de regulation de la
vitesse
IV.3.Comman de vectorielle en mode non decouplee (sans
compensation)
En associant tous les blocs nécessaires construits
précédemment, nous sommes parvenus à réaliser le
schéma de la simulation ci-dessous qui correspond à celui de la
figure 1.10 du chapitre précédent sur lequel, a
été rajoutée la boucle de régulation de la
vitesse.
|
Chapitre 2. Simulation de la commande vectorielle a flux
rotorique °dente avec Matlab/Simulink.
|
|
27
Rapport de projet realise, redige et presente par Danic
TOFFESSI YAPTA
Master 2 SEE-Energie Electrique, UHP - Nancy 1,
2009/2010
|
|
Figure 2-15 : Schema de la simulation de la
comman de vectorielle in directe a flux oriente avec couplage
des deux axes
d et q de la machine asynchrone (MAS naturelle) avec Simulink
|
|
|
R ésultats de la simulation :
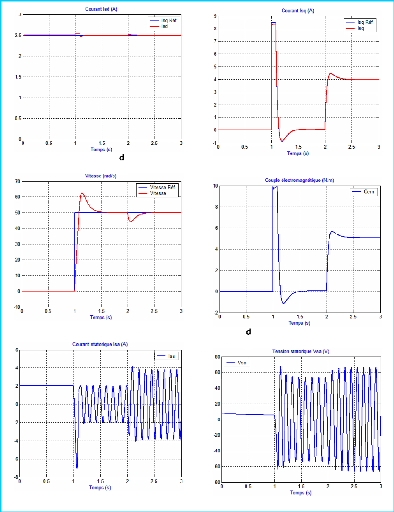
e- Courant statorique Isa
c- Vitesse angulaire
a- Courant Is
- Couple électromagnétique
f- Tension statorique Vsa
b- Courant Isq
Figure 2-16 : Résultats de la simulation de
la comman de vectorielle a flux rotorique orienté de la MAS
(Sans compensation)
La simulation a été effectuée sur une
durée de 3 secondes de la manière suivante : - La consigne
I IsdREF est maintenue constante à sa valeur
nominale 2,5A.
- Pour 0 < t = 1s , la consigne de vitesse
Ù REF est nulle.
- Pour 1 s < t = 2s , on
procède à un échelon de Ù REF =
50 rad / s , le couple de charge restant
nul (fonctionnement à vide).
- Pour t > 2 s , Ù
REF reste fixée à 50 rad/s et on injecte brusquement
une charge imposant à la
machine un couple résistant de 5 N.m, correspondant
à peu près la valeur 4A du courant IIsq .
IV.4- Comman de vectorielle en mode découplée
(avec compensation)
Le schéma en mode découplé est exactement le
même qu'en mode couplé, en plus du bloc de compensation
(découplage).
La simulation a été effectuée de la
même manière et dans les mêmes conditions que
précédemment.
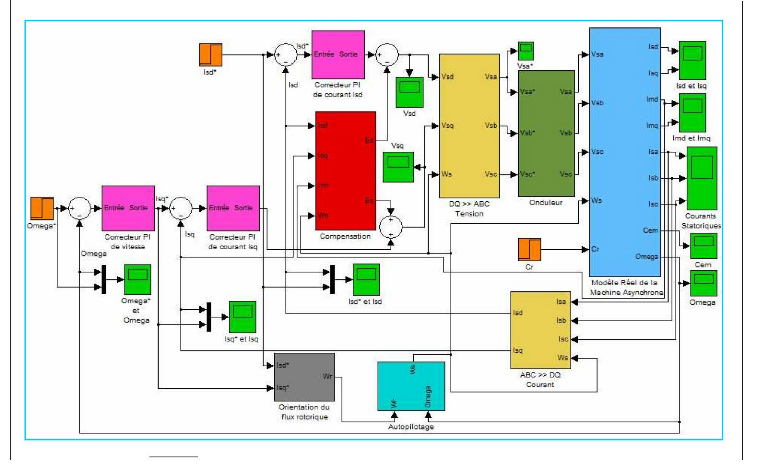
Figure 2 -17 : Schema de la simulation de la
comman de vectorielle in directe a flux oriente avec decouplage
des deux
axes d et q, de la machine asynchrone (MAS decouplee) avec Simulink
Chapitre 2. Simulation de la commande vectorielle a flux
rotorique °dente avec Matlab/Simulink.
30
Rapport de projet realise, redige et presente par Danic
TOFFESSI YAPTA Master 2 SEE-Energie Electrique, UHP - Nancy 1,
2009/2010
Résultats de la simulation :
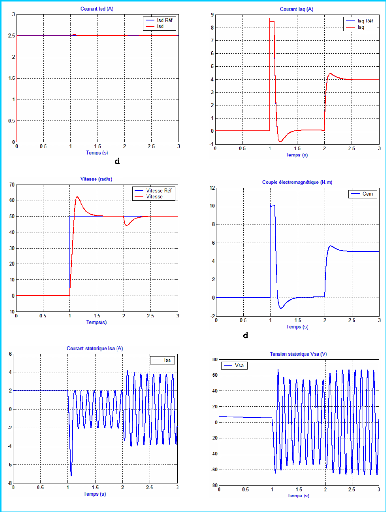
e- Courant statorique Isa
c- Vitesse angulaire
a- Courant Is
- Couple électromagnétique
f- Tension statorique Vsa
b- Courant Isq
Figure 2-18 : Résultats de la simulation de
la comman de vectorielle a flux rotorique orienté de la MAS
(Avec compensation)
Inversion de vitesse de 100 ra d/s a - 100
rad/s
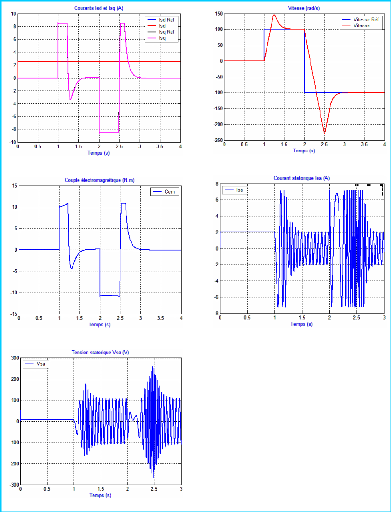
c- Couple électromagnétique
f- Tension statorique Vsa
a- Courants Isd et Isq
e- Courant statorique Isa
b- Vitesse
Figure 2-19 : Résultats de la simulation
d'une inversion de vitesse de 100 ra d/s a - 100 rad/s, en comman de
vectorielle in directe (Avec compensation)
| 

