Chapitre 3
Noyau associé continu asymétrique
Dans ce chapitre nous commençons par donner
la définition dun noyau associé continu. A partir de
cette définition, nous présentons lestimateur a noyau
associé continu asymétrique dans le cas
univarié puis multivarié. Nous étudions les
propriétés
élémentairesdecetestimateur.Différentsexemplesseronttraitésenguisedeconclusion.
3.1 Cas univarié
Danscettepremièrepartie,nousprésentonslestimateuranoyauassociécontinuasymétrique
dans le cas univarié. Cet estimateur est approprié pour estimer
des densités a support compact ou bornées d'un côté.
Nous allons traiter quatres noyaux di~érents
gamma, bêta, gaussien inverse (IG) et
gaussien inverse réciproque (RIG) Pour de
réé centes références nous pouvons consulter Chen
(1999 2000) et Scaillet (2004) Nous montrons les propriétés
élémentaires telles que biais, variance et MISE.
Ensuite nous déterminons les fenêtres optimales pour
chaque noyau associé considéré et
lerreur en fonction de ces valeurs.
Soit X1,X2,. . . ,Xn un échantillon de
variables aléatoires iid de densité de probabilité
continue inconnue f a support = [a,b], avec a E R et b E R ( est par exemple
le support [0,1] ou [0, + 8[). De manière
génèrale, l'estimateur a noyau continu est
de la forme suivante:
|
bfn(x) = 1
n
|
Xn
i=1
|
(3.1)
Kx,h(Xi)
|
= bfn,h,K(x),
on x est fixé dans , Kx,h est la fonction noyau
associéU et h est un réel strictement positif appelé
paramètre de lissage.
Dans le cas on Kx,h est associé a un noyau
continu symétrique il vérifie
~x - . ~
1
Kx,h(.) = hK .
h
Dans le cas purement asymétrique,
Kx,h est un noyau variable en fonction de la cible x (point
d'estimation). Il change de forme chaque fois
que x varie dans .
3.1.1 Definition
Definition 1: Soit x ? ? et h > 0. Nous appelons
"noyau associe continu "" Kx,h toute densit( de
probabilit( dune variable aléatoire Kx,h sur le support ?x,h tels
que:
|
?x,h n ? =6 Ø
|
(3.2)
|
|
?x?x,h ? ?
|
(3.3)
|
|
E(Kx,h) ~ x quand h ? 0
|
(3.4)
|
|
V ar(Kx,h) < co
|
(3.5)
|
|
V ar(Kx,h) ? 0 quand h ? 0.
|
(3.6)
|
Commentaires::
a. La relation (3.2) traduit le fait que
l'intersection entre le support des observations et le support du
noyau associé continu
asymétrique doit contenir au moins un
élement. Pour un h fixé, quand x parcourt ?, le
support ?x,h change, l'expression (3.3) suppose que ?
doit etre toujours contenu dans la réunion des ?x,h. La
condition (3.4) permet d'assurer la convergence ponctuelle de
l'estimateur ; elle met en évidence que le noyau
Kx,h est un noyau variable ou adaptif a la cible x. Par
analogie au cas continu symétrique, la
relation (3.5) n'est que la formule annoncée dans (25) du
chapitre précédent. Enfin, la relation (3.6) assure la
convergence de la variance de la variable aléatoire du
noyau associé et va nous servir dans les calculs suivants.
b. Avant que nous passons a l'étude des des
noyaux continus asymétriques, nous
reveFIG. 3.1 - Densit( de loi norinale centrée
Densité de la loi
normale

0.0 0.1 0.2 03 0A
th30040)
-6 -4 -2 0 2 4 6
x
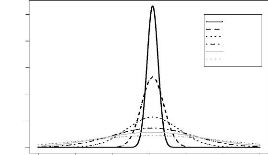
FIG. 3.2 -- Illustration de la densite normale pour h = 1.5 et x
= y varie

0.00 0.05 0.10 0.15 0.20 0.25
K(Y)
|
1
|
Xn
i=1
|
~ ~
exp -1 (Xi x)2 . 2 h2
|
|
nhv2ð
|
-10 -5 0 5 10
y
male N(u,ó2) est une loi continue
définie sur ? = R de densité de probabilité
gN(u,ó2) telle que
~ ~
1 -1 (x - u)2
gN(u,ó2)(x) = v2ðó2 exp .
2 ó2
Si X est une variable aléatoire qui suit la loi
normale alors lespérance et la variance sont respectivement
E(X) = u et V ar(X) = ó2.
La figure 3.1 donne l'allure
génerale d'une densité normale centrée Soit
KN(x,h2) le noyauassociéalavariablealéatoire
KN(x,h2) deloinormale N(x,h2)définisur ?x,h = R.
Nous vérifions ainsi chacune des hypothéses de la
définition 1 En effet, la relation (3.2) se traduit par l'intersection
de ? = R avec ?x,h = R qui n'est que R. En plus, d'apres
(3.3), la réunion sur x de R reste inchangée
puisque le support ne dépend pas de x. A partir de (3.4),
l'espérance est exactement égale a x;
E(KN(x,h2)) = x.
Finalement, la variance est finie et égal
exactement a 0 quand h ? 0;
V ar(KN(x,h2)) = h2 < 8.
A ce niveau, nous donnons l'estimateur a noyau
associé normal défini sur ? = R. Soit X1, ... ,Xn un
échantillon de variables aléatoires iid. de densité de
probabilité f continue et inconnue sur R. L'estimateur a
noyau associé gaussien est
|
bfn(x) = 1
n
|
Xn
i=1
|
KN(x,h2)(Xi)
|
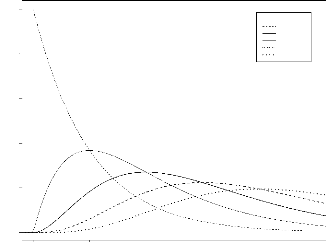
FIG. 3.3 Illustration de la densit normale pour x = 2.1 et h
varié

-1 0 1 2 3 4 5
N(x,h)(y)
0.0 0.5 1.0 1.5 2.0 2.5
h=0.15 h=0.3 h=0.7 h=1.1 h=1.4 h=1.8
Get estimateur est-il une densité de probabilité?
Oui en effet
ZR
Z ( (t - x ~2)
1
bfn(x)dx = -1
hv 2ð exp dx
2 h
R
Z r (x - t )2}
(a) 1 -1
= hv 2ð exp dx
2 h
R
= 1.
(a): La loi gaussienne est
symétrique le fait que nous
intégrons par rapport a x (la cible qui est aussi
la moyenne) ou a t (la variable aléatoire) ne
change rien; nous nous permettons ainsi de permuter entre
la cible x et t et nous trouvons que c'est une densité de
probabilité (voir figure 3.2 et 3.3). Bien que la
vérification dans le cas dun noyau
associécontinusymétriqueparaltsimple,laquestionrestevalablepourchacundesnoyaux
asymétriques.
Nous présentons maintenant les densités continus
asymétriques classiques que
nous allons utiliser dans la suite de cette section (Tab 31)
Soient a et b deux réels strictement positifs
qui vérifient
Z +8
(a) = e_tta_1dt
0
et
Z 1
B(a,b) = ta_1(1 - t)b_1dt.
0
3.1.2 Propriétés élémentaires
Nous donnons dans cette partie les différentes
propriétésfondamentales delestimateur a noyau
associé.
TAB. 3.1 -- ??????? re????t???t?? ??s ??s
?? ?r?????te ??t????s
?s\u9313‡A?éet?i??e
Loi de probabilité Support Densité
Gamma(a,b) R+ (a1)ba ta-1 exp(-t/b)
Beta(a,b) [0, 111 B(a,b)ta-1(1 -
t)b-1
IG(a,b) R+ vvb2ðt3 exp {- 2ba ( a t - 2 + 7)}
RIG(a,b) R+ l2ðtb exp {- 2ba (at - 2 + a1t)}
Loi de probabilité Espérance Variance
Gamma(a,b) ab ab2
Beta(a,b) a/(a + b) ab/ {(a + b)2(a + b + 1)}
IG(a,b) a a3/b
RIG(a,b) 1/a + 1/b 1/ab + 2/b2
Propriétés 1:: ??t X1,X2,. . . ,Xn ??
(????t???? ?? ??r?????s ??e?t?r?s ?????? ?? ????
b
s?t ?? ?r??????te ??t???? ??????? f d
s???rt ?? ??t fn ?? ?st???t??r ?? f a
?\u9313‡A??
b
fn(x) ???st ??s ?e?
?ss??e ??t??? ?s\u9313‡A?etr?q??
?é??? ?r ?? ??rs? ?? ???t?? x 7-?
??ss??r????t ??? ???s?tt ?? ?r??????té ?r ?? ??
?s??t
1,2
c = I bfn(x)dx = c(h,K) = 0,
b
??s ??s??er?s ?esr???s ???st???t??r fn t?? q??
|
in(x) = nc
|
Xn
i=1
|
Kx,h(Xi). (3.7)
|
|
Dans la suite, nous supposons que
|
fn(x) est une densité de probabilité.
Nous illustrons
|
cette hypothese dans la partie exemple
b
densite de probabilite continue inconnue f de support ?. Soit
fn l'estimateur de f a noyau associe continu
asymetrique Kx,h de variable aleatoire Kx,h
sur le support ?x,h. Alors, ?x ? ? et h > 0, nous avons
E {fri(x)} = E{f(Kx,h)} . (3.8)
Démonstration: Soit x ? ?. Nous avons successivement
E {/n(x) } = E nEKx,h(Xi)}
{ 1 n
i=1
= E {Kx,h(X1)}
(a)
=
= E{f(Kx,h)} .
(a); les Xi sont dans ? et le noyau
associé est défini sur ?x,h. D'on l'intégrale
se fait sur l'intersection des deux supports
Dans le but d'assurer la convergence ponctuelle de
lestimateur nous avons adapté le lemme présenté par Hille
(1948) et dont une démonstration a été donnée par
Feller (1966) dans le lemme1,page 219.Noussignalons
que celemme étaiténoncé
dansletravailrécentdeChaubey
etal.(2007)1.Ainsi,nousleformulonsdanslapropriétésuivante
Propriété 3: Soient f une fonction continue et
bornée sur ? et x est fixée sur ce
b
support. Soit fn l'estimateur a noyau
associé continu Kx,h sur ?x,h. Nous supposons que
?x ? ?,?x,h ? ?. Alors nous avons
|
E {In(x)} =
|
ftn?x,h
|
f(t)Kx,h(t)dt ? f(x) quand n ? 8.
|
La convergence est uniforme en toute subdivision de ?
dans laquelle V ar(Kx,h) ? 0 quand h ? 0 et la
fonction f est uniformément continue.
Démonstration: Nous partons de l'expression de lestimateur
dans (3.1) et nous calculons son espérance
E {fn(x)} = Kx,h(z)f (z)dz.
Itx,hn?
Comme?x,h ? ?, nous pouvons écrire f(x) = f(x) R
?x,h Kx,h(z)dz. Ainsi, il existe ä > 0
tel que
~
E{.7.n(x)}- f(x) =h{f(z) - f (x)}
Kx,h(z)dZ
Nx,
f |f(z) - f (x)| Kx,h(z)dz + I |f(z) - f (x)|
Kx,h(z)dz.
?? \u9670·?s et??s r???tes ???s ?? res??t?t ??r ? Pr??ss??r
???????? ????u a ??????er?it ??????????? ?t ?? ??s?t? ?? ???r?t?r? ??
??t?e??t?i??e ?????i?u?e ?? ???
Pour calculer la première quantité, nous
utilisons directement la définition de la continuité:
?e > 0, ? ä > 0, ?z : |z - x| < ä |f(z) -
f(x)| < €. D'on nous obtenons,
|f(z) - f (x)|Kx,h(z)dz = E Kx h(z)dz
lz-x|<ä flz-x|<ä
= €.
Pour calculer la deuxième quantité, nous
utilisons linégalité de Tchebychev-Markov
Comme f est bornée ? M > 0 tel que f = M. Ainsi, nous
avons
fl (z) - f (x)|Kx,h(z)dz = 2M I Kx,h(z)dz
z-xl>5|
1z-x|>ä
2M
ä2
ä2 Kx h(z)dz
flz-x|>ä
2M
L (z - x)2 Kx,h(z)dz
.,h
2M
ä2
E {(Kx,h x)2}
(a) = 2M 2M
ä2 V ar (Kx,h) + ä2 {E (Kx,h) -
x}2
(a): nous appliquons directement la formule
E(X2) = V ar(X) + {E(X)}2. Or, d'après les deux
hypothèses (3.4) et (3.6) du noyau associé,
la dernière inégalité tend vers 0. Nous
concluons enfin que
E { in(x)} -f(x) ? 0 quand n ? +8.
Remarque: ?? ?r?r?ete
q?? ??s ???s ?res??t( ?st ??????? ???s ??le ??s ??e
?\u9313‡A??\u9312‡@??t???s
s\u9313‡A?etr?q??s ?t
?s\u9313‡A?etr?q??s?
Proprietes 4: \u9670·?s ?res??t?s ??
?e?????????t ????t( ??
??\u9313‡A?r????r???? a ?r?d??
?t ?? ???t ?\u9313‡A?? ?? ?? ??r????? ??e?t?r? E(Kx,h) = mx,h
t?? q??
f(Kx,h)ÿ=f(mx,h) + (Kx,h -
mx,h)f0(x) + 12(Kx,h -
mx,h)2f"(x). (3.9)
?? ????????t ???s?er???? ?? ??tt?
q???t?té? ??s ?t???n
E {f(Kx,h)} ÿ=f {E(Kx,h)} +
2V ar(Kx,h)f00(x). (3.10)
1
3.1.3 Biais ponctuel
Propriétés 5:: Soit x fix( dans ?. Nous
avons
Biais {1n(x) } = E {1n(x)} - f(x)
=ÿ [f {E(Kx,h)} - f(x)] + 21 V
ar(Kx,h)f" (x). (3.11)
Demontration : En effet, d'apres le resultat de (38) et les deux
expressions dapproximation de Taylor-Lagrange
(3.9) et (3.10) le biais sobtient facilement en retranchant
f(x).
Remarque: Nous remarquons que le
biais ne d(pend pas de n et tend vers 0 quand h est tres
petit.
|
3.1.4 Variance ponctuelle
Pour un x fixe, nous generalisons l'expression de la
variance de que ce resultat sera utilise dans la partie exemple
|
b
fn.
|
Nous precisons
|
Propriétés 6:: Soit x fix( dans ?. Nous
avons
n o Z h n o i2
V ar bfn(x) =ÿ 1 K2
x,h(t)f(t)dt - 1 Biais bfn(x) . (3.12)
+ f (x)
n n
?x,hn?
Demonstration: Comme les Xi sont i.i.d., nous obtenons
successivement
V ar {:fn(x) } = V ar { 1 E Kx,h (Xi)}
n
i=1
|
1
n
1
n
|
[V ar {Kx,h(X1)}]
[E {Kx,h(X1)}2] -1 n [E{Kx,h(X1)}]2
|
(Z ) (Z )2
1 K2 - 1
x,h(t)f(t)dt Kx,h(t)f(t)dt .
n n
?x,hn? ?x,hn?
Par analogie avec le noyau continu
symetrique nous avons
|
{Z ?x,hn?
|
2
Kx,h(t)f(t)dt }=ÿ [Biais fn(x)} + f
(x) 2
|
et sous la condition f?x,hK x2 h(t) f (t)dt est finie,
la variance de fn est
J
1 2
V ar {in(x)} =ÿ1
h(t) f (t)dt } - n [Biais {fn(x)} + f (x)1 .
n Rxhn?x,
|
3.1.5 MISE L'erreur globale de
|
b
fn s'obtient en sommant le carré de
l'expression (311) avec le
|
resultat obtenu dans (3.12).
Propriétés 7: En sommant sur l'intersection des
deua supports, e MIISE est
|
Z
MISE =
?
|
{ }
E bfn(x) _ f(x) dx
x,hn?
|
Z { } Z }
Biais2 {
= V ar bfn(x) dx +
bfn(x) dx.
?x,hn? ?x,hn?
3.1.6 Exemples
Nous supposons dans toute la suite que f admet une
dérivée seconde continue sur
}2 }2
le support et que les termes suivants sont finis J {
{
f'(x) dx, J xf''(x) dx et
? ?
f{ }2
x3f''(x) dx.
?
a. Cas d'un noyau associé gamma
Chen (2000) était le premier a introduire l'estimateur a
noyau asymétrique. Il
préb
|
sentait au début un premier estimateur
|
fn a noyau gamma de
paramètres a = x/h + 1
|
et b = h, il calculait ensuite les propriétés
ponctuelles et globalesliées a cet estimateur Puis, a cause
des problèmes du biais au bord quavait cet estimateur Chen
e~ectuait
unelégèremodificationauniveaudesparamètresdunoyaugammapourréduirelerreur
|
et il représentait un deuxième estimateur
que nous notons
|
bbfn(x).
|
Nous rappelons qu'une loi gamma est une loi
continue asymétrique définie sur = R+ de
densité de probablité gG(a,b) telle que:
ta-1e-t/b
gG(a,b)(t) = (a)ba ,
Z
(a) =
avec
e-tta-1dt.
R+
Si X une variable aléatoire qui suit la loi
gamma, alors
E(X) = ab et V ar(X) = ab2.
D'après la figure 3.4, nous
remarquons que selon les valeurs que prennent
a et b, l'allure de la courbe change. Dans le cas particulier on a =
1 nous retrouvons la loi exponentionnelle.
Soit KG(x/h+1;h) le noyau associé a la variable
aléatoire 1G(x/h+1;h) de loi gamma et de support x,h = R+. Il
est donné par
FIG. 3.4 Allure générale d'une densit
gamma
Densité de la loi gamma
0 1 2 3 4 5
y
Density Gamma
0.0 0.2 0.4 0.6 0.8 1.0
Gamma
a=1 b=1
a=2 b=1
a=3 b=1
a=4 b=2
a=5 b=2
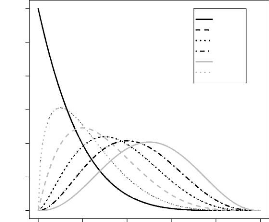
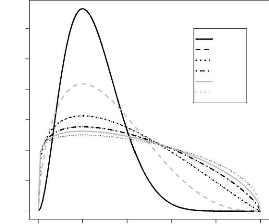
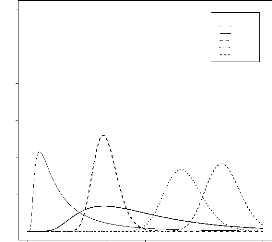
Les deux figures 3.5 et 3.6 donnent l'allure du
noyau associé gamma qui dépend
des paramêtres x et h. Nous donnons en premier lieu la
représentation du noyau gamma pour un h
fixé, nous remarquons qu'en changeant x
la courbe change légérement de forme et se
déplace principalement sur l'axe des abscisses. Cependant, si nous
varions h comme indiqué dans le
graphique 3.6, l'allure de cette densité
change complétement.
Nous révisons d'abord les différentes
hypotheses du noyau associé KG(x/h+1;h).
R+ = Ø.
i.R+ n =6
R+
ii.uxR+ = R+.
+ 1)h = x ' x h --* 0.
iii.E(JCG(x/h+1,h)) quand
= (x/h + h
xh +
iv.V ar(JCG(x/h+1,h)) = (x/h + 1)h2 = h2
< 00.
v.h --* 0 V ar(JCG(x/h+1,h)) = 0.
Soit X1,X2,. . . ,Xn un échantillon de
variables aléatoires iid. a support = R, de
b
densité de probabilité continue inconnue f. Nous
considérons l'estimateur fn a noyau associé
gamma tel que
Xn
i=1
Xn
i=1
bfn(x) = 1
n
1
n
KG(x/h+1;h)(Xi)
Xx/h
1 i e_Xi/h
(x/h + 1) hx/h+1 ,
FIG. 3.5 Allure du noyau assoei gamma
pour h = 0.2 et x varié
h=0.2
0 1 2 3 4 5
y

Gamma(x,h)(y)
0.0 0.5 1.0 1.5 2.0
x=0 x=0.5
x=1
x=2 x=2.8 x=3.5
on h > 0 est le paramêtre de lissage et K est
le noyau associé a une variable aléatoire de loi
gamma de paramêtres x/h + 1 et h. D'aprês (3.11), nous
avons
{ } = hf'(x) + 1
Biais bfn(x)
2hxf''(x) + o(h). (3.13)
Dans le calcul du biais, nous nous arrêtons a lordre 1
pour avoir une homogénéité des puissances avec
la variance dans le calcul de lerreur quadratique
moyenne intégrée MISE (Le biais sera
élevé au carré) D'aprês cette expression, nous
remarquons que e biais tend vers 0 quand h
tend aussi vers 0. Le fait que f' et f''
figurent dans la même équation, n'est pas
três favorable dans le calcul du biais puisque
ça augmente lerreur La complicité de la
dérivée premiere avec la dérivée seconde est dfe au
fait que x n'est pas la cible mais elle est plutôt le mode.
Nous calculons la variance de cet estimateur Daprês (312)
nous avons
{ o h
V ar bfn(x) = 1 E
~KG(x/h+1;h)(X1)~2i - 1 ~E ~KG(x/h+1;h)(X1)~]2 . n n
Nous calculons chacun des deux termes En effet nous avons
.
( )
X2x/h
1 e_2X1/h
E {KG(x/h+1;h)(X1)}2 = E
h2(x/h+1)2x/h + 1
FIG. 3.6 - Allure du noyau associe gamma
pour x = y = 2 et h varie
0.0 0.2 0.4 0.6 0.8
Gamma(x,h)(y)
x=2

h=0.1 h=0.3 h=0.7
h=1.1 h=1.4 h=1.8
0 2 4 6 8 10
y
Soit KG(2x/h+1;h) un noyau associe gamma de
par/ahme-et2rXe1s /2h
01. 2x/h + 1 et h;
{KG(2+1;h)(X1)} =
2 1 2x h2x/h+1(2x/h +
1).
Ce qui implique
X1 2x/he-2X1/h = h2x/h+1(2x/h
+ 1)KG(2x/h+1;h)(X1). Ainsi, nous trouvons finalement
(
h2x/h+1 (2x/h + 1)
E ~KG(x/h+1;h)(X1)~2 = E
h2(x/h+1) 2(x/h + 1) KG(2x/h+1;h)(X1)
h-1
(2x/h + 1) il K
lG(2x/h+1;h)PC1)}
=
2 (x/h + 1) .
Nous examinons les differentes conditions du noyau
associe KG(2x/h+1;h). i. R+ n R+ = R+ =6 Ø.
ii.?xR+ = R+.
iii. E(KG(20/+1;h)) = (2x/h + 1)h = 2x + h.
iv. V ar(KG(201,+1;h)) = (2x/h + 1)h2 = 2xh +
h2 < co.
v.h ? 0 V ar(KG(2x/h+1;h)) = 0.
Ah(x) ~
-1/2 si x/h ? 8
1h si x/h ? k,
?
??? ?
????
1 x 2vhð
(2k+1) 21+2k2(k+1)
Nous avons ainsi
E~KG(2x/h+1;h)(X1)~ = f(x) + h 2 f0(x) + o(h).
Soit l'expression de Ah(x) telle que
Ah(x) =h-1 (2x/h + 1)
2(x/h + 1).
Nous considerons la fonction R(z) monotone, croissante et
converge vers 1 quand z tend vers l'infini (i.e: ?z >
0, R(z) < 1). Elle est donnée par
v
2ð
R(z) = e-z zz-H. (3.14)
(z + 1)
En prenant z = 2x/h et z = x/h, nous obtenons
v2ð
e-2x/h(20.)2x/h+1/2
R(2x / h) =
(2x/h + 1)
R2(x/h) =
2ð e-2x/h(2x/h)2(x/h+1/2).
2 (x / h + 1)
Ainsi, Ah(x) peut etre exprimee en fonction de R(x/h) et
R(2x/h).
Ah(x) = 1 v2ð R2 (x / h)
e-2x/h 2x \ 2x/h+1/2 x -2(x/h+1/2)
2ð R(2x/h) e-2x/h h h
|
h1/2
|
R2(x/h) x R(2x / h)
|
-1/222x/h+1.
|
|
v2ð
|
Comme R(z) < 1 alors R2(z) reste encore inferieur a
1. Par consequent, le rapport
R(2x/h) < 1 et nous trouvons
R2(x/h)
h1/2 R2 (x/h)
-1/222x/h+1
Ah(x) =
v2ð R(2x/h) x
hv
= 2v.
ðx
Pour un h suffisamment petit,
on k est une constante positive.
Nous calculons a ce niveau le deuxieme terme de la variance
2
\ 112
[E {KG(x/h+1;h)(X1) I .1 = [E {Lfn,h,K(x)dx }i
=(a) 1.
(a): D'apres la propriété (3.7).
En conclusion, la variance est donnée par
-1/2f(x) + O(n-1) si x/h ? 8
1 si x/h ? k.
hnf(x)
V ar {:fii(x)} ~ ??? ? ?
????
1 x 2nvhð
(2k+1)
21+2k2(k+1)
L'impact de la variance au bord est
négligeable dans la calcul de son
intégrale, nous ne tenons compte que du terme
qui se trouve a lintérieur de notre support ceci se
démontre par le calcul suivant:
Soit ä = h1-E, on 0 < E < 1.
f ar {:fii(x)} dx = 1ä V ar
{:fii(x)} dx + f: V ar {:fii(x)} dx
T8 1
x-1/2 f (x)dx + O(n-1 h-€)
2nvher
1 r 2nvher 0 x-1/2 f (x)dx +
o(n-1h-6).
La valeur de la variance dans la petite boule de centre 0 et
de rayon h1-€ dispose d'une valeur dérisoire
ce qui fait que la quantité
qui pése le plus est celle qui se trouve au milieu de
]0, + 8[.
Nous mesurons ainsi l'erreur quadratique
moyenne intégrée MISE
8 2 rMI SE(n,h,K,f) = 10 Biais {fn(x) } + V
ar {:fn(x)}
Z 82
= h2 r f0(x) +
12xf"(x) dx
0
+ 2nN 1 her Jo8
x-1/2f(x)dx + o( 1 ).
nvh
En minimisant le MISE par rapport a h, nous avons
|
2h
|
fo
|
2
(x) + 12xf (x) } dx
|
1 1
2n 2h2Or /0
|
8
x
|
-1/2f(x)dx = 0.
|
Enessayantdedéterminerlafenetreoptimalenousregrouponslestermesen
hdememe coté;
8
0°
2h I {f' (x) + 1 2 x f" (x) }2
dx =
2n 2h2ver
1 x-1/2 f (x)dx.
C'est-à-dire
|
h5/2 = 1/20r f rx-1/2f()dx 4f 0 {1(x) +
(x)}2 dx
n
|
-1.
|
Enfin, la fen:tre optimale est
|
hopt =
|
(1/2vð)2/5 r
if08 x-1/2f(x)dx}2/5 n [f r { f' (x) +
1xf"(x)}2 dx] 2/5
|
-2/5.
|
La fenetre optimale dans le cas
asymétrique est dordre
O(n-2/5) inférieur que dans le cas
symétrique O(n-1/5). En
remplacant cette valeur optimale dans l'expression du MISE, nous
avons successivement
2
MISEopt (hopt)
ho2 pt 8 1
{f (x) + 2x f (x) } dx
|
+
|
1 1
|
8
L-1/2 I
x-1/2 f (x)dx
'opt
|
|
|
2vð n
|
|
=ÿ
|
n-4/5
44/5 2v7r 0
{ 1 /8 -1/2 2 1/5
x f(x)dx }4/5 f (x) + 2x (x) } dx .
[18 1 "
0
|
b
Dans le but de réduire le biais et par la suite
l'erreur entre fn et f, nous présontons le deuxième
estimateur qu'a introduit Chen (2000) ; la modification sest faite
au niveau de la cible de sorte qu'elle devient la moyenne
de la variable aléatoire du noyau associé. Pour cela,
soit
|
fn(x) = 1
n
|
Xn
i=1
|
KG(ñh(x);h)(Xi), (3.15)
|
ofi
|
ñh(x) ~
|
?
?? ?
???
|
x si x = 2h
4h2
x2+1
si x ? [0,2h[.
|
De la meme manière, nous calculons toute les
propriétés de cet estimateur Le biais est tel que:
|
Biais {in(x)} ~
|
?
?? ?
???
|
2 x f" (x)h + o(h) si x = 2h
îh(x)hf'(x) + o(h) si x ? [0,2h[.
|
La variable î dépend de h et change de
valeur en fonction de x, elle est égale à:
îh(x) = (1 - x) {ñh(x) - x/h} / {1 + hñh(x) -
x}.
Clairement, le biais est plus petit dans ce cas ;
quand x tend vers l'infini, nous obtenons une expression
qui ne dépend que de la dérivée seconde
f00, ce qui est plus faible par rapport au biais de
fn.
La variance de f est équivalente a celle de
fn pour x/h tend vers l'infini. Nous distinguons une
légère différence dans le cas on x/h s'approche
de la constante k. En effet, la variance est égale a:
~ ~
V ar bbfn(x) ~
x-1/2f(x) + O(n-1) si x/h ?
8
a(k) n1 h f (x) si x/h ? k,
?
???
???
1
n
v 1 2 hð
avec a(k) un coefficient qui dépend seulement
de k.
La somme du biais au carré et de la variance nous
amène a déterminer le MISE de cet estimateur;
1 1 1 1 2
MISE( r 2 f (x)dx
Tfii)= h2 {x f (x)} dx + v x
hð n 0
4 0
(1/2vð)2/5 U08 x-1/2f(x)dx}2/5 Lb 8 {x
f" (x)} 2 dx] 2/5 n
-2/5.
Ainsi, la fenêtre optimale est
hopt =
En substituant cette valeur dans lexpression du MISE lerreur
quadratique moyenne
intégrée optimale est::
-1/2 f (x)dx ] 4/5
1 1
MIS Eot(hot) =44/5 [ 2vð fo8 x [fo8
fixf"(x)12 dx ] 1/5 n-4/5.
|
Nouspouvonsêtretenterquelesdeuxestimateurs f
et
|
bb
f atteignentlavitessedeconver-
|
gence optimale. Nous montrons que pour
toute densité f continue:
Z 8 ~f (x) + 2 x f,, (x) }2
dx= fo8 {x f,,(x) }2 dx.
Ceci implique
systématiquement
MISEopt( bf) =
MISEopt(bbf).
Enfin, du point de vue purement théorique, il
est clair que le deuxième estimateur bbf donne de
meilleure performance en utilisant une fenêtre plus faible par rapport au
pre-
b. Cas d'un noyau associe beta
Tout comme les noyaux gamma, Chen (1999)
applique le même principe pour les noyaux
bêta. Il introduit pour cela un premier estimateur on ilit
remarque que les paramètres choisis ne sont pas
les plus adéquats donc, ilit essaye de les
harmoniser etet les es
arranger pour aboutir a de meilleures estimations
et par conséquent de meilleures perr formances. L'idée
est strictement la meme nous commencons ainsi par rappeler la loi
beta. La densité de probabilité d'une loi beta est définie
continue sur [0,1] telle que:
|
gBe(a,b)(t) = on a > 0, b > 0 et vérifiant
|
B(a,b)ta-1(1 - t)b-11[0,1](t), 1
|
B(a,b) = I ta-1 (1 - t)b-1dt.
Si X est une variable aléatoire qui suit la loi
beta alors
a ab
E(X) = et V ar(X) =
a + b (a + b)2(a + b + 1).
La figure 3.7 donne l'allure de la fonction beta d'une
manière générale.
FIG. 3.7 -- Allure generale de la densit(
bêta
0.0 0.2 0.4 0.6 0.8 1.0
y

Bet3(3,b)
4
3
2
Bêta
a=2 b=2
a=3 b=2
a=4 b=2
a=2 b=3
a=3 b=3
LenoyauKBe(x/h+1;(1-x)/h+1))estlenoyauassociéaunevariablealéatoire
KBe(x/h+1;(1-x)/h+1)) de loi beta et de support ?x,h = [0,1] tel
que:
.
1
KBe(x/h+1;(1-x)/h+1)(t) = B(x /h + 1,(1 - x)/h +
1)tx/h(1 - t)(1-x)/h
FIG. 3.8 -- Allure du noyau associe bêta pour
h = 0.2 et x varie
h=0.2
Beta(x,h)(y)
0 1 2 3 4 5 6
x=0 x=0.1 x=0.2 x=0.3 x=0.4 x=0.5
0.0 0.2 0.4 0.6 0.8 1.0
y
Lesfigures3.8et3.9donnentlavariationdunoyaubetachaquefoisquenouschangeons
les paramètres x et h.
Nous nous assurons que ce noyau est bel et
bien un noyau associé i.[0,1] n [0,1] = [0,1] =6 Ø.
ii.?x[0,1] = [0,1].
(x+h)
iii. E(KBe(x/h+1;(1--x)/h+1)) = (1+2h) x quand h
?0.
x(1--x)h+h2+h3
iv.

V ar(KBe(x/h+1;(1--x)/h+1)) = (1+2h)2(1+3h)< 8.
v.h ? 0 V ar(KBe(x/h+1;(1--x)/h+1)) = 0.
Soit X1,X2,. . . ,Xn un échantillon de
variables aléatoires i.i.d sur ? = [0,1], de densité
de probabilité continue
asymétrique inconnue f. Nous considérons
l'estimateur
fn de f
a noyau beta tel que
|
fn(x) = 1
n
|
Xn
i=1
|
KBe(x/h+1;(1--x)/h+1)(Xi)
|
1
n
Xn
i=1
B(x/h + 1,(1 - x)/h + 1)
,
1 Xi x/h(1 - Xi)(1--x)/h
avec x ? [0,1] et h > 0 est le paramètre de
lissage.
FIG. 3.9 -- Allure du noyau associe bêta pour x
= y = 2 et h varie
x=0.2
Beta(x,h)(y)
0.0 0.5 1.0 1.5 2.0 2.5 3.0
h=0.1 h=0.3 h=0.7
h=1.1 h=1.4 h=1.8
0.0 0.2 0.4 0.6 0.8 1.0
y
En se bénéficiant des calculs antérieurs
nous avons
1
Biais {:fii(x) } = h(1 - 2x) f (x) + 2x(1 -
x)hf"(x) + o(h),
et
V ar {:fii(x)} = n1 [E
1KBe(x/h+1;(1-x)/h+1)(X1)}21 + O(n-1),
on
1 i (1 - Xi)2(1-x)/h.
~KBe(x/h+1;(1-x)/h+1)(X1)~2 = B2(x/h + 1;
(1 - x)/h + 1)X2x/h
Soit KBe(x/h+1;(1-x)/h+1) le noyau
associé de loi beta défini par
KBe(2x/h+1;2(1-x)/h+1)(Xi) =
B(2x/h + 1; 2(1 - x)/h + 1)
1
i
X2x/h(1 - Xi)2(1-x)/h.
Ce qui fait que
Xi 2x/h(1 -Xi)2(1-x)/h = B(2x/h + 1; 2(1 - x)/h +
1)KBe(2x/h+1;2(1-x)/h+1)(Xi). Ainsi:
Tout compte fait, nous avons
E {KBe(x/h+1;(1-x)/h+1)(X1) }2
B(2x/h + 1; 2(1 - x)/h + 1)
=
B2(x/h + 1;(1 - x)/h + 1)
E {KBe(2x/h+1;2(1-x)/h+1)(Xi)}.
Nous appellons Ah(x) = B(2x/h+1;2(1-x)/h+1)
B2(x/h+1;(1-x)/h+1) et nous rappellons que B(a,b) =
(a)(b)
(a+b) .
Nous vérifions les conditions du noyau
associé KBe(2x/h+1;2(1-x)/h+1)(Xi).
i.[0,1] n [0,1] = [0,1] =6 z. ii.ux[0,1] = [0,1].
x+h/2
iii.E(KBe(2x/h+1;2(1-x)/h+1)) = 1+h ~ x quand h ?
0.
< 8.
iv.V ar(KBe(2x/h+1;2(1-x)/h+1)) = 4x(1-x)h+2h+h2 v.h ? 0
V ar(KBe(2x/h+1;2(1-x)/h+1))
(2+2h)2(2+3h)
= 0.
En exploitant la fonction (3.14), nous avons
/
27r
R(2x/h) = ô(2x/h + 1)e
(2x
-2x/h
~2x/h+1/2
h
|
/
27r
R(2(1 - x)/h) = ô (2 ( 1 - x)/h + 1)e
|
(2(1 - x) )2(1-x)/h+1/2
-2(1-x)/h
h
|
|
/
27r
R(2/h + 1) =ô (2/ h+ 2)e
|
/2 )2/h+1+1/2
-2/h+1 h + 1
|
De même, nous avons
|
27r
R2(x/h) = ô2(x/h + 1)e
|
-2x/h ~x ~2x/h+1/2
h
|
|
27r
R2((1 - x)/h) = ô2(2(1 - x)/h +
1)e
|
(1 - x
-2(1-x)/h
h
|
~2(1-x)/h+1/2
|
|
27r
R2(1/h + 1) = ô2(1/h +
2)e
|
/1 + h )2(1/h+1)
-2(1/h+1)
h
|
Ainsi, nous trouvons
1 7r {x(1 - x)}-1/2 h-1/2 R(2/h +
1)R2(x/h)R2((1 - x)/h) Ah(x) = 2/
R(2x/h)R(2(1 - x)/h)R2(1/h + 1).
Enmajorantcetteexpressionpar
1,Ah(x)prenddeuxvaleursdifférentesselonlaconvergence du
rapport x/h et (1 - x)/h.
|
Ah(x) ~
|
?
????
????
|
2v 1 ð {x(1 - x)}-1/2 h-1/2 si x/h et (1 -
x)/h ? 8
22k+12(k+1)h-1
(2k+1) si x/h ou (1 - x)/h ? k.
|
Enfin, la variance est égale a
{ }
V ar bfn(x) ~
?
????
????
1 nh1/2 f(x) + O(n-1) si x/h et (1 - x)/h ?
8
2v ð {x(x - 1)}-1/2 1
ô(2k+1)
22k+1ô2(k+1)
nhf(x) + O(n-1)
1 si x/h ou (1 - x)/h ? k.
Nous évaluons l'erreur quadratique
moyenne intégrée de cet estimateur
1 2
MISE {:fii(x) }=ÿh2 {10 (1
- 2x) f' (x) + 2 x(1 - x)f" (x) } dx
1r+ 27Whð {x(x - 1)}-1/2 f (x)dx.
Nous minimisons le MISE par rapport h et nous
déterminons la fenêtre optimale hopt.
2/5

[
1 [2,/ðf o1 {x(x - 1)}-1/2 f (x)dx]
-2/5.
hopt = 42/5
f
o1(1-2x)f
'
(x)+
1
2
-
x(1-x)f
''
(x)
} dx]
De maniere similaire au noyau associé
gamma et en considérantlles mêmesrraisonspour les
quelles nous avons introduit le second estimateur a noyau
associé gamma quiccorrge le biais au
bord, nous présentons a ce, niveau le second estimateur a
noyau assocéébtta défini sur [0,1] :
|
fn(x) = 1
n
|
Xn
i=1
|
KBe(x;h)(Xi), (3.16)
|
|
avec
|
KBe(x;h)(Xi)
|
?
?????? ?
???????
|
KBe(x/h;(1-x)/h)(Xi) si x ? [2h,1 - 2h]
KBe(ñh(x);(1-x)/h)(Xi) si x ? [0,2h[
KBe(x/h;ñh(1-x))(Xi) si x ?]1 - 2h,1]
|
on ñh(x) = 2h2 + 2.5 - /4h4 +
6h2 - x2 - x/h. ?h fixé, ñh(x) est
croissante sur [0,2h]. Nous faisons tendre h vers 0 et vers 1, les
quantités au bord deviennent faibles Ainsi
nousrécupéronsjustel'expressionquisetrouvealintérieurdelintervalle.Nousrévisons
les hypotheses mis sur le noyau associé
i.[0,1] n [0,1] = [0,1] =6 Ø.
ii.?x[0,1] = [0,1].
iii.E(KBe(x/h;(1-x)/h)) = x.
iv. V ar(KBe(x/h;1-x/h)) = x(1-x)h 1+h <
8.
v. h ? 0 V ar(KBe(x/h;1-x/h)) = 0. Le biais est
égal à
|
Biais {fn(x)}
|
?
?????? ?
???????
|
2 hx(1 - x) f" (x) + o(h) si x ? [2h,1 - 2h]
æh(x)hf0(x) + o(h) si x ? [0,2h]
-æh(x)hf0(x) + o(h) si x ? [1 - 2h,1]
|
2 2/5 n
avec æh(x) = (1 - x) {ñh(x) - x/h} {1 +
hñh(x) - x}.
La variance de ce deuxieme estimateur est similaire au
premier quand x/h et (1 - x)/h
tendent vers l'infini.
V ar {1n(x)} =
1
{x(x - 1)}-1/2 f(x) + O(n-1).
2nvhð
Enfin, la fenetre optimale est
|
Comme
|
hopt =
|
[2 \1/ð f {x(x - 1)}-1/2 f
(x)dx] 2/5 ol
~nR 1 o2 ~2/5 n
o x(1 - x)f00(x) dx
|
--2/5.
|
~Zo
~2 Z 1
1 n o2
(1 - 2x)f0(x) + 1 2x(1 -
x)f00(x) dx = x(1 - x)f00(x) dx,
o
alors la fenetre optimale du premier estimateur est plus
grande que celle du second. En
remplacant la
valeur optimale de h dans l'expression du MISE nous constatons
que
|
l'erreur quadratique moyenne
intégrée trouvée dans le cas de
bfn.
|
fn est inférieure a celle de
|
|
MISE(
|
bfn) = MISE(fn).
|
c. Cas d'un noyau associe gaussien inverse
II Soit g(t) la densité de loi gaussienne inverse telle
que
,
v ~-b ~ t ~~
b
gIG(a,b)(t) = v2ðt3 exp a - 2 + a
2a
t
on t > 0 et (a,b) est un couple de deux réels
strictement positifs La figure 310 donne l'allure
générale de la densité gaussienne inverse
Si X est une variable aléatoire qui suit la loi
gaussienne inverse alors
E(X) = a et V ar(X) = a3/b.
Soit KIG(x;1/h) le noyau gaussien
inverse associé a la variable aléatoire KIG(x;1/h) défini
sur ?x,h = [0, + 8[, de parametres x et 1/h. Ce noyau associé
KIG(x;1/h) se définit comme suit:
~ -1~ t ~~
1
KIG(x;1/h)(t) = v2ðht3 x - 2 + x .
exp 2hx t
Nous vérifions chacune des hypotheses du
noyau associé i.R+ n R+ =6 Ø.
ii.?xR+ = R+.
iii.E(KIG(x;1/h)) = x.
iv. V ar(KIG(x;1/h)) = x3h < 8.
v.h ? 0 V ar(KIG(x;1/h)) = 0.
FIG. 3.10 - Allure générale de la densit
gaussienne inyerse
0 1 2 3 4 5 6
t

Inverse Geussisn(e,b)
OA 0.5 1.0 1.5 2.0
Inverse Gaussian
a=1 b=10
a=2 b=25
a=3 b=7
a=4 b=30
a=5 b=15
Ainsi le noyau KIG(x;1/h) est un noyau
associé. Les graphiques 311 et 312
présentent l'allure d'une densité gaussienne inverse
quand nous varions x et h.
Pour un échantillon de variables aléatoires iid
X1,X2, . . . ,Xn, nous considérons la
densité de probabilité f inconnue définie
continue sur R+. Soit l'estimateur
bfn de f a
noyau inverse gaussien défini sur
[0, + 00[ tel que:
|
bfn(x) = 1
n
|
Xn
i=1
|
KIG(x;1/h)(Xi)
|
|
=
|
1
n
|
Xn
i=1
|
( -1 (Xi
1
x
q2ðhX3 exp 2hx
i
|
2 +
|
~~
x ,
Xi
|
on le paramêtre h est strictement positif et x est dans
R+.
En tenant compte de ce qui était cité
précédemmentle biais est
{ } = 1
Biais bfn(x)
2x3f00(x)h + o(h),
donc
Z } Z {
Biais2 { }2
bfn(x) dx = 1 4h2
x3f00(x) dx + o(h2).
R+ R+
{ }2
Comme f x3f00(x) dx est finie
alors, pour tout x qui tend vers +00,
x3f00(x)
converge vers 0. D'oñ le biais diminue
quand x augmente.
R+
~-1 ~X1 ~~ q
x - 2 + x = ðhX3 1KIG(x;2/h)(X1),
FIG. 3.11 -- Allure du noyau associe
gaussien inverse pour h = 0.1 et x varie
0 1 2 3 4 5 6
!GM m)
3A
2A 2.5
1.5
0.5 1.0
OA
Inverse Gaussian
x=1
x=2
x=3
x=4
x=5
Nous calculons la variance sur la base des calculs effectues au
prealable.
V ar {:fii(x)} = 1 E
IIKIG(x;1/h)(X1)}21+O(n-1).
L
|
~KIG(x;1/h)(X1)~2 = 1
2ðhX-3
1 exp
|
xh x
-1 (1
2 + x )1
X
X1
|
Soit KIG(x;2/h)(X1) le noyau gaussien
inverse de parametre x et 2/h associe a KIG(x;2/h) et definie sur [0,
+ 8[. Nous verifions simplement les differentes hypoteses liees a
cette variable aleatoire :
R+ n R+ Ø
ii.?xR+ = R+.
iii.E(KIG(x;2/h)) = x.
= x3 h
iv.V ar(KIG(x;2/h)) 2 < 8 .
v. h ? 0 V ar(KIG(x;2/h)) = 0.
En conclusion, il s'agit d'un noyau associe
Tout bien considers

xh x{ -1 (X1
- 2 +
v
2
KIG(x;2/h)(X1) = p2ðhX3 exp
1
Ce qui implique
OA 0.5 1.0 1.5 2.0 2.5
IGNim)
FIG. 3.12 Allure du noyau assoei gaussien
inverse pour x = 2 et h varié

Inverse Gaussian
h=0.1
h=0.2
h=0.4
h=0.7
h=0.9
0 1 2 3 4 5 6
x
et par la suite, nous avons
{ }
X-3/2
E [{KIG(x;1/h)(X1)}2i = v 1 ðhE 1
KIG(x;2/h)(X1) .
2
A partir de l'approximation de
Taylor-Lagrange nous obtenons
{ } { }
X-3/2 K-3/2
E 1 KIG(x;2/h)(X1) = E IG(x;1/h)f(KIG(x;1/h))
= x-3/2f(x) + O(h).
En conclusion, quand x > 0 se situe a
l'intérieur du support, la variance est
.
{ } x-3/2
V ar bfn(x) = v 1 n f(x) +
o(n-1h-1)
2 hð
La variance au bord, quand x/h ? k, présente
quelques différences. Elle est
égale a
,
{ } k-3/2
V ar bfn(x) = v 1 n f(x) +
o(n-1h-2)
2 hð
k étant une constante positive. L'erreur
globale de cet estimateur est
Z { }2 Z
1 1
MISE ÿ=4h2
x3f00(x) dx + v 1 x-3/2f(x)dx.
R+ 2 hð n R+
Nous cherchons a determiner le h optimal. Pour cela, nous
minimisons le MISE par rapport a h, nous trouvons
1
2
Z h R{x3 f" (x)}2 dx
1 1
2h2Or 2n
L+x-3/2f(x)dx = 0,
c'est a dire
h5/2 L+ {x3 f" (x)}2 dx = 1
1
20r n J+ x-3/2 f (x)dx.
Enfin, la fenetre optimale est
2/5
{
-2/5.
1 R o
2v R+ x-3/2f(x)dx ð
hopt = 2 /5 n
[fR+ {x3 f" (x)}2
dx1--
En l'exploitant dans la formule du MISE nous trouvons
14/5 r i 12/5
5 I
MISE(hopt) = 4 121 v ð L+ x-3/2 f (x)dx
x3 f" (x)dx n-4/5.
1 JR+
d. Cas d'un noyau associe gaussien nverse
rcciroque RIIG Nous considerons g(t) la densite de
loi gaussienne inverse reciproque
v ~-bgRIG(a,b)(t) =
v2ð exp t 2a (at - 2 + at )1
on t > 0, a > 0 et b > 0. La figure 3.13
donne l'allure generale d'une densite gaussienne inverse
reciproque. Si X est une variable aleatoire qui suit la
loi gaussienne inverse reciproque alors
|
E(X) = 1
a
|
+
|
1
b et V ar(X) = 1b + 22.
|
SoitKRIG(1/(x-h);1/h)
lenoyaugaussieninversereciproqueassociealavariablealeatoire
KRIG(1/(x-h);1/h) defini sur ?x,h = [0, + co[, de parametres 1/(x - h) et 1/h.
Ce noyau se presente comme suit :
KRIG(1/(x-h);1/h)(t) =
exp
ðht
2 + x ;h)}

2h
h t
x - h
-
1
v2
Nous commencons par verifier chacune des
hypotheses du noyau associe i.{? = [0, + co[} n {?x,h =
[0, + co[} = [0, + co[6= Ø.
ii.?x[0, + co[= [0, + co[.
iii. E(KRIG(1/(x-h);1/h)) = x-h + h = x.
iv. V ar(KRIGo./(x-h)0./h)) = (x - h)h + 2h2 = xh +
h2 < co. v.h ? 0 V ar(KRIG(1/(x-h);1/h)) = 0.
FIG. 3.13 -- Allure generale de la densite
gaussienne inverse réeiirrque

Reciprocal Inverse Gaussian
a=1 b=10
a=2 b=25
a=3 b=7
a=4 b=8 a=0.5 b=5
5
4
3
2
Reciprocal Inverse Gaussian
0 1 2 3 4 5 6
t
Ainsi toutes les conditions du noyau associé
sont satisfaites.
Soit X1,X2, ...,Xn l'échantillon de variables
aléatoires i.id. de densité de probabilité f
b
inconnue définie continue sur ? = R+. Nous
considérons l'estimateur fn de f noyau gaussien
inverse réciproque défini sur [0, + 8[ tel
que
|
bfn(x) = 1
n
|
i=1
|
KRIG(1/(x-h);1/h)(Xi)
|
1
n
=
Xn
i=1
1 x - h (Xi2 x -
v2ðhXi exp 1 2h x - h + Xi) ,
avec h > 0 et x ? R+.
En tenant compte des résultats obtenus
précédemment
Biais {:fii(x) } = 21 x f" (x)h + o(h),
et donc
FIG. 3.14 -- ????r? ?? ?\u9313‡A?? ?ss??e
???ss??? ????rs? ré???rq?? ??r x
= 2 ?t h ??r?e

MOO /10
3A
2A 2.5
1.5
0.5 1.0
OA
Reciprocal Inverse Gaussian
h=0.1 h=0.2 h=0.4 h=0.7 h=0.9
0 1 2 3 4 5 6
x
En refaisant les calculs de la variance de la même
facon nous trouvons
si x/h ? 8 si xfi.1 k.
V ar {fn(x)} ~
|
?
????
????
|
1 x -1/2f
|
(x) + O(n-1)
+ 7 k3/2) + O(n-1)
' 16
|
|
2nvhð
1 (k-1/2
|
|
2nhvð
|
La fenêtre optimale est egale à
|
hopt =
|
( 1 )2/5 {L#177; x-1/2f
(x)dx}2/5
200
[fR#177; {xf"(x)}2 dx12/5
|
n-2/5.
|
En conclusion, nous evaluons le MISE en fonction de cette valeur
hopt:
M I S E(hopt) = #177; (20r)
1 2/5 {fly
[fR#177; {xf"(x)}2 dx]
x-1/2f (x)dx 12/5
2/5 n-2/5.
e. Remarques:
i. ????? ?? s???rt ?? ?\u9313‡A?? ?ss??e ?x,h ??
?e???? ??s ?? ?? x ?? ?? h ??rs ?e?
?\u9312‡@?????s q?? ??s ???s
tr??té?
ii. ???s ???\u9312‡@?r?ss?? ?? ??
???êtr? ?t?????? ?? ???s?it ?????? f ?t s?
?ér??é? s????????r??t ???s ?? ???er?t??r ?t ??
?e???er?t??r ??tr??r????t ?? ??a
\u9313‡A?éet?i?? o f s? tr???
s???????t ?? ?e???er?t??r ?? ??s ????s ???i? ???nne ???????
?nt? ? ?a s\u9313‡A?etr?q?? ?t
?s\u9313‡A?etr?q??? ??rs ??r
????ttr? ? ?ée??? ?"??????? ???? ?ée??????st???t?? ??
??r??etr? h? f ??t
s\u9313‡Aste??t?q?????t s???r? ??? ?? ??t????
?a\u9313‡A?é? tr?q?? ??
s???rt R? P?r ?\u9312‡@?????? ???s ?? ??s ??s
?\u9313‡A??\u9312‡@ ?ss??és ?????? ???ss???????rs?
?t ???ss??? ????rs? re???rq??? ??s
???s?s ?? f s??t ??? ??
?s\u9313‡A?etr?q???e??? s?r R+? ???s ??
??s ??s ?\u9313‡A??\u9312‡@ ?ss??es ?êt?? ?? ???s?it
??i ???nne ? ?? ???or [0,1]?
| 

