III.1 Les machines électriques
Notre nouveau système sera constitué de deux
principales machines électriques qui sont, les
moteurs asynchrones triphasés et les capteurs de
présence dite les photocellules. III.1.1 Les moteurs asynchrones
triphasées
Figure 10:Machine asynchrone triphasé
Le nouveau système de traitement de bagages
automatisé sera constitué de six moteurs asynchrones
triphasés qui seront consacrées aux équipements de la
manière suivante. Un moteur pour le convoyeur d'injection, un autre
opérant dans deux sens pour la machine à rayon-X, un
2018/2019 20 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
autre pour le convoyeur transporteur, un moteur
dédié au carrousel et deux moteurs pour les deux volets
permettant leurs ouvertures et leurs fermetures.
III.1.1.1 présentation des moteurs asynchrone
triphasée
Le moteur asynchrone triphasé est largement utilisé
dans l'industrie, sa simplicité de
construction en fait un matériel très fiable et
qui demande peu d'entretien. Il est constitué d'une partie fixe, le
stator qui comporte le bobinage, le rotor qui est bobiné en cage
d'écureuil. Les circuits magnétiques du rotor et du stator sont
constitués d'un empilage de fines tôles métalliques pour
éviter la circulation du courant.

Figure 11:Moteur asynchrone à cage
d'écureuil
Le rotor ne peut pas tourner à la même vitesse
que le champ magnétique crée par les trois enrôlements
statoriques, sinon la cage ne serait plus balayée par le champ tournant
et il y'aurait disparition des courants induits et donc des forces de Laplace
et du couple moteur. Les deux fréquences de rotation ne peuvent donc pas
être synchrones d'où le nom moteur asynchrone.
· Le moteur est relié au réseau par
un certain nombre de dispositifs de sécurité et de commande
:
2018/2019 21 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
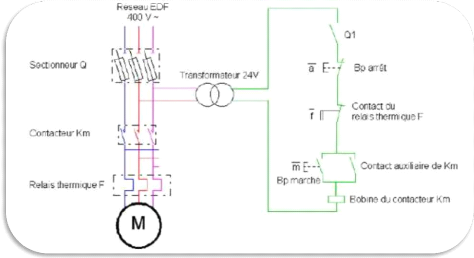
Figure 12:raccordement d'une machine asynchrone au
réseau triphasé
-Le sectionneur d'isolement avec fusibles permet de
déconnecter le moteur du réseau pour les opérations de
maintenances par exemple. Il protège également le dispositif en
aval contre les risques de court-circuit grâce aux fusibles.
-Le contacteur permet d'alimenter le moteur avec une commande
manuelle ou automatique avec un automate programmable.
-Le relais thermique protège le moteur contre les
surcharges de courant, l'intensité maximale admissible est
réglable. Son action différentielle permet de détecter une
différence de courants entre les phases en cas de coupure d'une liaison
par exemple.
-Le transformateur abaisse la tension secteur à une
valeur de 24V pour garantir la sécurité des utilisateurs sur la
partie commande.
2018/2019 22 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 13:dispositif en connexe avec la machine asynchrone
III.1.1.2 Le variateur du fréquence (variateur du
vitesse)

Figure 14:Variateur de vitesse et machine asynchrone
III.1.1.2.1 Principe de la variation de vitesse
La vitesse de synchronisme d'un moteur asynchrone
triphasé est fonction de la fréquence (alimentation) et du nombre
de paires de pôles : NS = f /p Pour un moteur tétrapolaire
à 50 Hz : NS = 50 / 2 = 25 tr/s soit 1500 tr/mn Le moteur aura une
vitesse de rotation inférieure à NS . Pour exprimer
l'écart entre vitesse de synchronisme et vitesse rotor, on
définit le glissement : g = (NS - N) / NS g est voisin de 5% Pour varier
la vitesse du moteur asynchrone, on pourra faire varier la fréquence des
courants d'alimentation.
| 

